Download as pdf or txt
You might also like
- New Monarch Nice 3000 PDFDocument233 pagesNew Monarch Nice 3000 PDFIrwaenk Sevenfold78% (32)
- Qualification Personnel: Responsibilities RequirementsDocument21 pagesQualification Personnel: Responsibilities RequirementsKhoironSyamdatuNo ratings yet
- PSG Module IIDocument47 pagesPSG Module IIDr. Srinivas MNo ratings yet
- Psu PDFDocument75 pagesPsu PDFJhoanna DacatimbangNo ratings yet
- Lecture 5 (Week 5) : EE305 Instrumentation and Measurement Teaching Assistant Šejla DžakmićDocument20 pagesLecture 5 (Week 5) : EE305 Instrumentation and Measurement Teaching Assistant Šejla DžakmićFrank WhiteNo ratings yet
- Lec2 Relay - History - and - HardwareDocument33 pagesLec2 Relay - History - and - HardwareEVTNo ratings yet
- PCE-Training Manual - Day 2-2 GOVERNING SYSTEMS PDFDocument110 pagesPCE-Training Manual - Day 2-2 GOVERNING SYSTEMS PDFhiralalnhpc100% (1)
- Comparison of Protection Relay TypesDocument5 pagesComparison of Protection Relay TypesEuroSMC en América LatinaNo ratings yet
- 4.3 Hysteretic PresentationDocument13 pages4.3 Hysteretic PresentationAjay KrishnaNo ratings yet
- Unit 5 Op Amp NewDocument24 pagesUnit 5 Op Amp NewAkram MohithNo ratings yet
- Control & Monitoring Relays Briefing: Simply Reliable. Simply AvailableDocument18 pagesControl & Monitoring Relays Briefing: Simply Reliable. Simply AvailableSOULIKHYANo ratings yet
- Reverse Power Relay RPR415 User's Guide: FeaturesDocument4 pagesReverse Power Relay RPR415 User's Guide: Featuresmohamadfirdaus84No ratings yet
- RPR415 Manual - InddDocument4 pagesRPR415 Manual - InddhashimNo ratings yet
- Stamford AVR SX460 PDFDocument4 pagesStamford AVR SX460 PDFNasredine AlainNo ratings yet
- Unit 5Document79 pagesUnit 5talim khanNo ratings yet
- Comparison of Protection Relay TypesDocument6 pagesComparison of Protection Relay TypesVasudev AgrawalNo ratings yet
- FFB 2907 - FairchildDocument13 pagesFFB 2907 - FairchildStevenNo ratings yet
- Operational Amplifiers: David Lomax Azeem Meruani Gautam JadhavDocument28 pagesOperational Amplifiers: David Lomax Azeem Meruani Gautam JadhavSrijan ThakurNo ratings yet
- Operational Amplifiers: David Lomax Azeem Meruani Gautam JadhavDocument28 pagesOperational Amplifiers: David Lomax Azeem Meruani Gautam JadhavJaideep SinghNo ratings yet
- ECE131 UNIT5 Part3Document88 pagesECE131 UNIT5 Part3abhi shek100% (1)
- 3RP15111AP30 Datasheet enDocument5 pages3RP15111AP30 Datasheet enMohamed DhifallahNo ratings yet
- SIEMENS SIRIUS 3RP1505-1BP30 - DatasheetDocument5 pagesSIEMENS SIRIUS 3RP1505-1BP30 - DatasheetYahya GharbiNo ratings yet
- SX460 ManualDocument4 pagesSX460 ManualJonathan Heyneke100% (1)
- Worcester Valve Actuator Series AF17 EPDocument4 pagesWorcester Valve Actuator Series AF17 EPaleNo ratings yet
- Chap 14Document22 pagesChap 14RajendraNo ratings yet
- Operational AmplifiersDocument33 pagesOperational Amplifiersaayush kumar nayakNo ratings yet
- Sks Am Trs Antenna MeasurementDocument30 pagesSks Am Trs Antenna Measurementakj024No ratings yet
- Op-Amp Applications: Areti Gopi Eee DeptDocument28 pagesOp-Amp Applications: Areti Gopi Eee Deptareti gopiNo ratings yet
- Chapter 6 Voltage RegulatorsDocument68 pagesChapter 6 Voltage RegulatorsNabil FikriNo ratings yet
- AC DriveDocument165 pagesAC Drivesisar100% (3)
- PFR PFR PFR: FeaturesDocument2 pagesPFR PFR PFR: FeaturesBlackArnabNo ratings yet
- PID Tuning TutorialDocument1 pagePID Tuning TutorialDan SomervilleNo ratings yet
- Pow-R-Con-multi-function-control - Product Spec 37264Document5 pagesPow-R-Con-multi-function-control - Product Spec 37264justinNo ratings yet
- Barber Colman Pow R ConDocument5 pagesBarber Colman Pow R ConOmarColonNo ratings yet
- Operational AmplifiersDocument33 pagesOperational AmplifiersMichael de VeraNo ratings yet
- 02 SynchronousDocument150 pages02 Synchronousneela100% (2)
- Controller ModesDocument72 pagesController ModesAdnan AkramNo ratings yet
- Hands On Training On Transformer Protection RelaysDocument22 pagesHands On Training On Transformer Protection RelaysVenugopal Patnaik100% (2)
- Tps 51120Document44 pagesTps 51120peloton10No ratings yet
- JBL Gto5355Document4 pagesJBL Gto5355Thiago BressaniNo ratings yet
- 3RP15051BT20 Datasheet enDocument5 pages3RP15051BT20 Datasheet enKostadin DechevskiNo ratings yet
- Puneet ppt22Document17 pagesPuneet ppt22sarafvivekNo ratings yet
- Operational AmplifiersDocument56 pagesOperational AmplifiersRupert Rosel AmatorioNo ratings yet
- 3RP15311AP30 Datasheet enDocument5 pages3RP15311AP30 Datasheet enradikahendryNo ratings yet
- 3RP15271EC30 Datasheet enDocument5 pages3RP15271EC30 Datasheet enLucas CastroNo ratings yet
- Mikro - Power Factor RegulatorDocument6 pagesMikro - Power Factor Regulatorshawonscribd75% (4)
- Protective Functions FR-A800 Series - Inverters-FREQROL - MITSUBISHI ELECTRIC FADocument25 pagesProtective Functions FR-A800 Series - Inverters-FREQROL - MITSUBISHI ELECTRIC FADavid nguyenNo ratings yet
- LicaDocument24 pagesLicaraavankumarNo ratings yet
- 3RP25051BT20 Datasheet enDocument6 pages3RP25051BT20 Datasheet enFaiz 3BNo ratings yet
- ECD II Presentation OP-AMP ApplicationsDocument30 pagesECD II Presentation OP-AMP ApplicationsUmaNo ratings yet
- 4.30 PM Control SystemDocument54 pages4.30 PM Control SystemKhushboo BholeNo ratings yet
- 252 PhouDocument3 pages252 PhoubiltuNo ratings yet
- 11-4 Troubleshooting: Symptom Probable Cause Items To Check MeasuresDocument1 page11-4 Troubleshooting: Symptom Probable Cause Items To Check MeasuresDominique KomeyNo ratings yet
- 11-4 Troubleshooting: Symptom Probable Cause Items To Check MeasuresDocument1 page11-4 Troubleshooting: Symptom Probable Cause Items To Check MeasuresDominique KomeyNo ratings yet
- Answer KeyDocument9 pagesAnswer Keygebretsadkan abrha100% (1)
- Regulated DC Power Supply Part 3Document18 pagesRegulated DC Power Supply Part 3create foxesNo ratings yet
- 38-001 Datasheet Level Flow Control ESPIAL 10 2013Document3 pages38-001 Datasheet Level Flow Control ESPIAL 10 2013mubashirfareedNo ratings yet
- Analogue Electronics: - Operational AmplifiersDocument46 pagesAnalogue Electronics: - Operational AmplifiersNimsiri AbhayasingheNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Ch1 - IntroductionDocument74 pagesCh1 - IntroductionAli HasanyNo ratings yet
- Ch3 - ThyristorsDocument38 pagesCh3 - ThyristorsAli HasanyNo ratings yet
- Money and The Fed: Unit 4 NotesDocument32 pagesMoney and The Fed: Unit 4 NotesAli HasanyNo ratings yet
- Ch8 - DC DrivesDocument55 pagesCh8 - DC DrivesAli HasanyNo ratings yet
- Engineering Project Management: OTM-455 DR Iqra Asghar FALL-2021Document32 pagesEngineering Project Management: OTM-455 DR Iqra Asghar FALL-2021Ali HasanyNo ratings yet
- Week 2 SlidesDocument19 pagesWeek 2 SlidesAli HasanyNo ratings yet
- Circula Flow ModelDocument40 pagesCircula Flow ModelAli HasanyNo ratings yet
- MEP CompanyDocument24 pagesMEP Companyniteen_mnnitNo ratings yet
- PPTDocument18 pagesPPTSaurabh AggarwalNo ratings yet
- DC Motor Speed Control Using PID ControllerDocument7 pagesDC Motor Speed Control Using PID ControllerEditor IJTSRDNo ratings yet
- 1 s2.0 0005109896855464 MainDocument20 pages1 s2.0 0005109896855464 MainFrancisco FloresNo ratings yet
- What Are The Pros and Cons of Rockwell'S Plantpax Versus Deltav? Is Plantpax Actually A DCS?Document4 pagesWhat Are The Pros and Cons of Rockwell'S Plantpax Versus Deltav? Is Plantpax Actually A DCS?AlanNo ratings yet
- Fcu & Vav ScheduleDocument19 pagesFcu & Vav Schedulejohnney98No ratings yet
- AutopilotDocument21 pagesAutopilotShabrish ShabriNo ratings yet
- Linear Control SystemsDocument76 pagesLinear Control SystemsKamran TariqNo ratings yet
- P Pi ControllerDocument4 pagesP Pi ControllerYawar AbbasNo ratings yet
- Speed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodDocument7 pagesSpeed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodNithyashriNo ratings yet
- HVAC Basics: Hvac - Heating, Ventilation, Air-ConditioningDocument20 pagesHVAC Basics: Hvac - Heating, Ventilation, Air-ConditioningAli GurselNo ratings yet
- L3 BlockDiagramDocument18 pagesL3 BlockDiagramRaj PatelNo ratings yet
- Field BusDocument27 pagesField BusStef DriessensNo ratings yet
- PLC ExerciseDocument1 pagePLC Exercisesimmercool0% (1)
- Mathematical ModelingDocument8 pagesMathematical ModelingMourougapragash SubramanianNo ratings yet
- 2023 - Lecture - 16-17 - Introduction To PI ControlDocument22 pages2023 - Lecture - 16-17 - Introduction To PI ControlPatrick LustyNo ratings yet
- 01 - Model Predictive Control DistilationDocument49 pages01 - Model Predictive Control DistilationMayer FernandesNo ratings yet
- Manul of Multi-Frequency Remote Control Duplicator (New)Document11 pagesManul of Multi-Frequency Remote Control Duplicator (New)Eduardo RoqueNo ratings yet
- Lab Report Process (Repaired)Document16 pagesLab Report Process (Repaired)amirulNo ratings yet
- Modeling and Control For Stability and Rotation Velocity of A Rotary Inverted Pendulum PDFDocument6 pagesModeling and Control For Stability and Rotation Velocity of A Rotary Inverted Pendulum PDFSerrano García Uriel IvánNo ratings yet
- CompensatorDocument69 pagesCompensatorKarthika KandasamyNo ratings yet
- Introduction To PLC PDFDocument8 pagesIntroduction To PLC PDFKhodr ChehadeNo ratings yet
- Process Control Instrumentation - InstrumentationToolsDocument15 pagesProcess Control Instrumentation - InstrumentationToolsCarlos JimenezNo ratings yet
- Process Control: Cement Process Engineering Vade-MecumDocument9 pagesProcess Control: Cement Process Engineering Vade-MecumHasnaoui SamirNo ratings yet
- Pi Tops DemoDocument54 pagesPi Tops DemoAndres JimenezNo ratings yet
- Analog & Digital Motor Control ManualDocument204 pagesAnalog & Digital Motor Control ManualRafath Mohammed100% (2)
- 1264 SNAP PID ModuleDocument7 pages1264 SNAP PID ModuleAlexander Charry GiraldoNo ratings yet
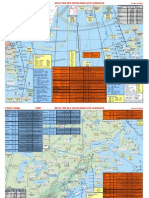
- ETOPS+Diversion ChartDocument2 pagesETOPS+Diversion Chartflyspannerr100% (1)
- Simatic pcs7 Traing Course PDFDocument34 pagesSimatic pcs7 Traing Course PDFmiraNo ratings yet