Download as pdf or txt
You might also like
- C560XL Schematic ManualDocument215 pagesC560XL Schematic Manualmrxybb100% (3)
- Practica Asist Socialeintre Religios Si SecularDocument12 pagesPractica Asist Socialeintre Religios Si Seculargabriela100% (2)
- Earth Resistivity Measurement Interpretation TechniquesDocument9 pagesEarth Resistivity Measurement Interpretation TechniquesJairo Sierra ArenalesNo ratings yet
- Fast Imaging of TDEM Data Based On S-InversionDocument18 pagesFast Imaging of TDEM Data Based On S-InversionYunus Can KurbanNo ratings yet
- AizebeokhaiDocument14 pagesAizebeokhaiKokoghoOyonsNo ratings yet
- 02 1995 Zh&Mackie&Mad GeophDocument13 pages02 1995 Zh&Mackie&Mad GeophgpsglonassNo ratings yet
- Oldenburg 1990Document40 pagesOldenburg 1990Roland Rawlins IgaborNo ratings yet
- Three-Dimensional Magnetotelluric Inversion For Triaxial Anisotropic Medium in Data SpaceDocument24 pagesThree-Dimensional Magnetotelluric Inversion For Triaxial Anisotropic Medium in Data SpaceBehar HusseinNo ratings yet
- Near surfaceGeophProsp1999Document17 pagesNear surfaceGeophProsp1999Nlem NdongoNo ratings yet
- Interpretadon of The Magnetotelluric Impedance Tensor-Bahr 1987Document10 pagesInterpretadon of The Magnetotelluric Impedance Tensor-Bahr 1987Edna MariaNo ratings yet
- 1D Complete Calculation For Electrostatic SoundingsDocument10 pages1D Complete Calculation For Electrostatic SoundingsAhmad ImamNo ratings yet
- AC ResistivityDocument6 pagesAC ResistivityJulio TedescoNo ratings yet
- PUB 04 06 FNG Fault Imaging ComberDocument18 pagesPUB 04 06 FNG Fault Imaging ComberFreddyCondoriCondoriNo ratings yet
- Inversion Techniques Applied To Resistivity Inverse ProblemsDocument18 pagesInversion Techniques Applied To Resistivity Inverse ProblemsMárcioBarbozaNo ratings yet
- Geolistrik MethodDocument26 pagesGeolistrik MethodMeidiArisalwadiNo ratings yet
- Three-Dimensional Terrain Corrections and Magnetometric Resistivity Surveys For Mise-K-La-MasseDocument12 pagesThree-Dimensional Terrain Corrections and Magnetometric Resistivity Surveys For Mise-K-La-MasseAhmad ImamNo ratings yet
- 03.licenta Disertatie Poisson Equation SaqqaraDocument8 pages03.licenta Disertatie Poisson Equation SaqqaraRenata TatomirNo ratings yet
- CR1Dmod: A Matlab Program To Model 1D Complex Resistivity Effects in Electrical and Electromagnetic SurveysDocument9 pagesCR1Dmod: A Matlab Program To Model 1D Complex Resistivity Effects in Electrical and Electromagnetic SurveysJuan Andres Bascur TorrejónNo ratings yet
- Exemplo 01Document7 pagesExemplo 01gfddkhgksjdfhNo ratings yet
- Joint Inversion of Seismic Refraction and Resistivity Data Using Layered Models - Applications To Groundwater InvestigationDocument13 pagesJoint Inversion of Seismic Refraction and Resistivity Data Using Layered Models - Applications To Groundwater InvestigationDian Pratiwi MalikNo ratings yet
- Propagation in Planar Waveguides and The Effects of Wall RoughnessDocument15 pagesPropagation in Planar Waveguides and The Effects of Wall Roughnessjesus1843No ratings yet
- The Inversion of Data From Complex 3-D Resistivity and I.P. SurveysDocument4 pagesThe Inversion of Data From Complex 3-D Resistivity and I.P. SurveysVvg ValenciaNo ratings yet
- BaniaDocument9 pagesBaniaAlways. BangtanNo ratings yet
- DCinv V6 Rev2 CleanDocument38 pagesDCinv V6 Rev2 Cleanyasirarafat91No ratings yet
- Determination of Dipping Contacts UsingDocument20 pagesDetermination of Dipping Contacts UsingRoland Rawlins IgaborNo ratings yet
- Sea Effects On Grounding Systems An Analytical and Numerical StudyDocument37 pagesSea Effects On Grounding Systems An Analytical and Numerical StudyChang LeeNo ratings yet
- Ggy 462Document13 pagesGgy 462Emanuelle MachadoNo ratings yet
- Impedance Spectroscopy - James Ross MacdonaldDocument17 pagesImpedance Spectroscopy - James Ross Macdonalds viniNo ratings yet
- Pot Theory XieDocument4 pagesPot Theory XieThomasNo ratings yet
- Bahr 1991Document15 pagesBahr 1991jesaduNo ratings yet
- Transient Electromagnetic Response of A Three-Dimensional Body in A Layered EarthDocument20 pagesTransient Electromagnetic Response of A Three-Dimensional Body in A Layered EarthAnggita Dwi NugraheniNo ratings yet
- Merwa 2005Document11 pagesMerwa 2005ionhandshakerNo ratings yet
- C Mennessier 1999 Phys. Med. Biol. 44 2483Document29 pagesC Mennessier 1999 Phys. Med. Biol. 44 2483David SarrutNo ratings yet
- GGZ 204Document16 pagesGGZ 204deepak kumarNo ratings yet
- Three-Dimensional Magnetotelluric Forward Modeling For Static-Shifted ModelDocument4 pagesThree-Dimensional Magnetotelluric Forward Modeling For Static-Shifted ModelSiti Reiwanti AuliyaniNo ratings yet
- AbuZEID ContributionDocument14 pagesAbuZEID ContributionYerkhaNo ratings yet
- Numerical Modeling of Magnetic Induction Tomography Using The Impedance MethodDocument8 pagesNumerical Modeling of Magnetic Induction Tomography Using The Impedance Methodm.cheboutNo ratings yet
- Geophysics 2012 ChenDocument15 pagesGeophysics 2012 ChenpeterdreamerNo ratings yet
- An Alternative Algorithm For One-Dimensi PDFDocument7 pagesAn Alternative Algorithm For One-Dimensi PDFAhmad NyxNo ratings yet
- Jung 2009Document8 pagesJung 2009Muhammad HaroonNo ratings yet
- Temperature Dependent Electrical Characterization of Thin Film Cu Znsnse Solar CellsDocument5 pagesTemperature Dependent Electrical Characterization of Thin Film Cu Znsnse Solar Cellsdasgirija00012No ratings yet
- Maineult Et Al-2012-Geophysical ProspectingDocument8 pagesMaineult Et Al-2012-Geophysical Prospectingjesadu100% (1)
- Computational Mathematics and Physics of Fusion Reactors - Paul R. GarabedianDocument5 pagesComputational Mathematics and Physics of Fusion Reactors - Paul R. GarabediandougnovaesNo ratings yet
- Automatic 1-D Inversion of Magnetotelluric Data by The Method of ModellingDocument9 pagesAutomatic 1-D Inversion of Magnetotelluric Data by The Method of ModellingPedroNo ratings yet
- Direct and Inverse Scattering For Transient Electromagnetic Waves in Nonlinear MediaDocument25 pagesDirect and Inverse Scattering For Transient Electromagnetic Waves in Nonlinear Medianetscape10No ratings yet
- 2005 CSEG Recorder Unsworth Apr05 07Document5 pages2005 CSEG Recorder Unsworth Apr05 07RandiRusdianaNo ratings yet
- Magnetotelluric Method: A Tool For Deep Crustal Study: Pritam Bera, Dr. C. K. Rao, IIGDocument7 pagesMagnetotelluric Method: A Tool For Deep Crustal Study: Pritam Bera, Dr. C. K. Rao, IIGGian Angga PratamaNo ratings yet
- Faceting For Direction-Dependent Spectral DeconvolutionDocument15 pagesFaceting For Direction-Dependent Spectral Deconvolution蔡翰儒No ratings yet
- Nature Spin PolariseDocument4 pagesNature Spin PolariseGokaran ShuklaNo ratings yet
- ArticleDocument10 pagesArticletalleb hakeimNo ratings yet
- Guenther R Uecker 2012 ParisDocument5 pagesGuenther R Uecker 2012 ParisFelipe RincónNo ratings yet
- Itoh Full-Wave Analysis Microstrip StructureDocument6 pagesItoh Full-Wave Analysis Microstrip StructureneymarronNo ratings yet
- A New Algorithm For Electrical Impedance Tomography Inverse ProblemDocument5 pagesA New Algorithm For Electrical Impedance Tomography Inverse Problemjagomez7896No ratings yet
- AmplitudePhase Decomposition PDFDocument30 pagesAmplitudePhase Decomposition PDFevanz lazaroNo ratings yet
- 2004 Profiling Voids Embedded in A Slab by A Non Linear ModelDocument9 pages2004 Profiling Voids Embedded in A Slab by A Non Linear Modelaion_rebNo ratings yet
- Nonsmooth Nonconvex Optimization For Low-Frequency Geosounding InversionDocument9 pagesNonsmooth Nonconvex Optimization For Low-Frequency Geosounding InversionHugoHidalgoNo ratings yet
- Matsuno Etal 2014 GeophysJInternatDocument10 pagesMatsuno Etal 2014 GeophysJInternatPaulus PanduNo ratings yet
- Inversion Techniques Applied To Resistivity InversDocument19 pagesInversion Techniques Applied To Resistivity InversIvonaNo ratings yet
- 01 0302031 L Norgren PDFDocument37 pages01 0302031 L Norgren PDFkmd_venkatsubbuNo ratings yet
- Wei - Paper For PetrophysicDocument13 pagesWei - Paper For Petrophysicyangwei00414312No ratings yet
- Eissa 2022 Pitfalls in Three-Dimensional Numerical Modeling of Electrical Resistivity MethodDocument13 pagesEissa 2022 Pitfalls in Three-Dimensional Numerical Modeling of Electrical Resistivity MethodRaad Mohammed AbdAlzahra - رعد محمد عبد الزهرةNo ratings yet
- Gravity NotesDocument7 pagesGravity NotesRohit kumarNo ratings yet
- Gravity Notes 3Document38 pagesGravity Notes 3Rohit kumarNo ratings yet
- Beardsmoreetal 2016Document11 pagesBeardsmoreetal 2016Rohit kumarNo ratings yet
- Trans Dimensional Monte Carlo Inversion of Short Period Magnetotelluric Data For Cover Thickness EstimationDocument8 pagesTrans Dimensional Monte Carlo Inversion of Short Period Magnetotelluric Data For Cover Thickness EstimationRohit kumarNo ratings yet
- Resistivity 1D Forward ModellingDocument51 pagesResistivity 1D Forward ModellingRohit kumarNo ratings yet
- Transdimensional Inference in The GeosciencesDocument17 pagesTransdimensional Inference in The GeosciencesRohit kumarNo ratings yet
- GGZ 111Document21 pagesGGZ 111Rohit kumarNo ratings yet
- Bayesian Monte Carlo Inversion of Multiple Data Sets To Image TheDocument209 pagesBayesian Monte Carlo Inversion of Multiple Data Sets To Image TheRohit kumarNo ratings yet
- Bhattacharya2003 ResistivityDocument16 pagesBhattacharya2003 ResistivityRohit kumarNo ratings yet
- 05 - Geophysical Inverse ProblemsDocument32 pages05 - Geophysical Inverse ProblemsRohit kumarNo ratings yet
- A Trans-Dimensional Bayesian Markov Chain Monte Carlo AlgorithmDocument21 pagesA Trans-Dimensional Bayesian Markov Chain Monte Carlo AlgorithmRohit kumarNo ratings yet
- Low Earth Orbit: Orbital Characteristics Use of LEODocument5 pagesLow Earth Orbit: Orbital Characteristics Use of LEORohit kumarNo ratings yet
- Appendix 1: Fourier SeriesDocument6 pagesAppendix 1: Fourier SeriesRohit kumarNo ratings yet
- Practical 1Document3 pagesPractical 1Rohit kumarNo ratings yet
- Appendix 5: Vector Spaces and The Function SpaceDocument7 pagesAppendix 5: Vector Spaces and The Function SpaceRohit kumarNo ratings yet
- Jean AttachmentDocument17 pagesJean AttachmentReena VermaNo ratings yet
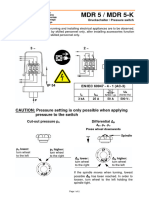
- Pressure Switch MDR5Document4 pagesPressure Switch MDR5Fidelis NdanoNo ratings yet
- Draftsmangrade II PDFDocument3 pagesDraftsmangrade II PDFakhilaNo ratings yet
- Hprocedure of Export or ImportDocument96 pagesHprocedure of Export or ImportHiren RatnaniNo ratings yet
- 16AIC - BIM For Renovation & Retrofitting by Sonny Andalis Part2of3Document3 pages16AIC - BIM For Renovation & Retrofitting by Sonny Andalis Part2of3Ray RamiloNo ratings yet
- 1.introduction To HydraulicsDocument32 pages1.introduction To HydraulicsJet Espejon JavierNo ratings yet
- MATH 5 Q4 Module 2 Vizualizing Volume of Cube and Rectangular PrismDocument21 pagesMATH 5 Q4 Module 2 Vizualizing Volume of Cube and Rectangular PrismAnj De Guzman75% (4)
- Electronics Interview QuestionsDocument8 pagesElectronics Interview QuestionsshyamNo ratings yet
- Coke MetallurgicalDocument1 pageCoke MetallurgicalRailesUsadosNo ratings yet
- Lesson 3Document4 pagesLesson 3Justin Kean HakeemNo ratings yet
- Me 335 Exp 2Document8 pagesMe 335 Exp 2Brian AliasgharNo ratings yet
- Technological Institute of The Philippines-ManilaDocument17 pagesTechnological Institute of The Philippines-ManilaRoscarl GorospeNo ratings yet
- MP900 and MP9000 Series Kool-Pak Power Film Resistors: TO-126, TO-220 and TO-247 StyleDocument3 pagesMP900 and MP9000 Series Kool-Pak Power Film Resistors: TO-126, TO-220 and TO-247 StyleManoel HenriqueNo ratings yet
- Environmental SanitationDocument2 pagesEnvironmental SanitationAngelica GraceNo ratings yet
- Jul-Sep 2008 Voice For Native Plants Newsletter, Native Plant Society of New MexicoDocument16 pagesJul-Sep 2008 Voice For Native Plants Newsletter, Native Plant Society of New Mexicofriends of the Native Plant Society of New MexicoNo ratings yet
- Tutor Marked Assignment (TMA) SR Secondary 2018 19Document98 pagesTutor Marked Assignment (TMA) SR Secondary 2018 19kanna2750% (1)
- Neonatal Ventilator EN NV8 V1.3Document4 pagesNeonatal Ventilator EN NV8 V1.3Surta DevianaNo ratings yet
- Wizard 2 BPUNIR2 PDFDocument16 pagesWizard 2 BPUNIR2 PDFalpdrNo ratings yet
- 26 MatricesDocument26 pages26 MatricesFazli KamawalNo ratings yet
- Flood and Debris Loads On Bridges PHD Thesis Mark Jempson PDFDocument457 pagesFlood and Debris Loads On Bridges PHD Thesis Mark Jempson PDFThong NguyenNo ratings yet
- Assign 01 (8610) Wajahat Ali Ghulam BU607455 B.ed 1.5 YearsDocument9 pagesAssign 01 (8610) Wajahat Ali Ghulam BU607455 B.ed 1.5 YearsAima Kha KhanNo ratings yet
- WEEK 8 VentilationDocument39 pagesWEEK 8 VentilationNURIN ADLINA TAJULHALIMNo ratings yet
- 11thMachAutoExpo 2022Document112 pages11thMachAutoExpo 2022Priyanka KadamNo ratings yet
- Biology Form 5 Notes Chapter 1Document39 pagesBiology Form 5 Notes Chapter 1Mayghen SelvanayagamNo ratings yet
- ESP Front Page Idea Aravinth 2Document10 pagesESP Front Page Idea Aravinth 2adcreation3696No ratings yet
- Acceleration Theory & Business Cycles: Sem Ii - MebeDocument14 pagesAcceleration Theory & Business Cycles: Sem Ii - MebePrabhmeet SethiNo ratings yet
- Chap 11Document3 pagesChap 11Flia Diaz ZunigaNo ratings yet
- Continental Drift - WikipediaDocument18 pagesContinental Drift - WikipediaRed EmperadorNo ratings yet