
Experiments On A Coupled Oscillator
Experiments On A Coupled Oscillator
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5824)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Production & Export of Spices in Sri LankaDocument13 pagesProduction & Export of Spices in Sri Lankahasithrock75% (4)
- SATVAM-A Project ReportDocument79 pagesSATVAM-A Project ReportDhruvil Gajjar100% (2)
- Layout Solns 3Document12 pagesLayout Solns 3VIKRAM KUMARNo ratings yet
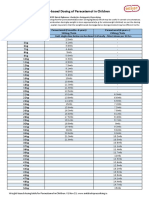
- Paracetamol Dosing Paeds v1 Nov 21Document1 pageParacetamol Dosing Paeds v1 Nov 21gul jahanNo ratings yet
- Project FormittingDocument61 pagesProject Formittinggul jahanNo ratings yet
- PHYS3500Document3 pagesPHYS3500gul jahanNo ratings yet
- Amplifier & OcillatorDocument109 pagesAmplifier & Ocillatorgul jahanNo ratings yet
- Seminario StellatoDocument35 pagesSeminario Stellatogul jahanNo ratings yet
- McLeanA SessionIII P04Document1 pageMcLeanA SessionIII P04gul jahanNo ratings yet
- Polarization Division Multiplexed System For VLC Using RGB LEDsDocument5 pagesPolarization Division Multiplexed System For VLC Using RGB LEDsgul jahanNo ratings yet
- Coupled OscillatorsDocument5 pagesCoupled Oscillatorsgul jahanNo ratings yet
- OscillatorDocument5 pagesOscillatorgul jahanNo ratings yet
- Statistical and Thermal Physics Fundamentals and ApplicationsDocument13 pagesStatistical and Thermal Physics Fundamentals and Applicationsgul jahanNo ratings yet
- For Printing Ringbind A4Document78 pagesFor Printing Ringbind A4Consiso BallarNo ratings yet
- The Modern Ayurvedic Cookbook - Healthful, Healing Recipes For Life (PDFDrive)Document700 pagesThe Modern Ayurvedic Cookbook - Healthful, Healing Recipes For Life (PDFDrive)8btdmkdx46No ratings yet
- Pspice TutorialDocument56 pagesPspice TutorialCutie0% (1)
- Atlas1 PDFDocument400 pagesAtlas1 PDFtrieu tranNo ratings yet
- Finamill Brand Guidelines: October 9, 2019Document13 pagesFinamill Brand Guidelines: October 9, 2019Md Roknuzzaman khanNo ratings yet
- XJ 1861 Naxos Xerjoff Perfume - A Fragrance For Women and Men 2015Document1 pageXJ 1861 Naxos Xerjoff Perfume - A Fragrance For Women and Men 2015yuchenguo12No ratings yet
- SedraSmith8e Chapter 04 SpiceProblemGuideDocument5 pagesSedraSmith8e Chapter 04 SpiceProblemGuide辰.No ratings yet
- Food and Nutrition G10 - 12 PDFDocument29 pagesFood and Nutrition G10 - 12 PDFDøps Maløne86% (21)
- The Plant Resources of South-East Asia (PROSEA)Document7 pagesThe Plant Resources of South-East Asia (PROSEA)herni rahmayantiNo ratings yet
- Semiconductor Module Users GuideDocument294 pagesSemiconductor Module Users GuideValerioApicellaNo ratings yet
- Semiconductor Module Users GuideDocument318 pagesSemiconductor Module Users GuideR YNo ratings yet
- Export of Spices To Uk - IB FinalDocument42 pagesExport of Spices To Uk - IB Finalrohitkolekar100% (1)
- Kerala - Worksheet FinalDocument3 pagesKerala - Worksheet FinalPia KhannaNo ratings yet
- Substitutions For Cooking - NYT CookingDocument6 pagesSubstitutions For Cooking - NYT CookingDejan StojadinovićNo ratings yet
- Haleem Recipe Fox LifeDocument2 pagesHaleem Recipe Fox LifeswapnilnemadeNo ratings yet
- Welcome To The Department of Food & Drug Administration, Uttar PradeshDocument9 pagesWelcome To The Department of Food & Drug Administration, Uttar PradeshUtk AgNo ratings yet
- Sausage MakingDocument135 pagesSausage Makingmarcela33j9603No ratings yet
- Circuit Simulation Using SPICEDocument18 pagesCircuit Simulation Using SPICEMagnanil GoswamiNo ratings yet
- Seasoning Formulation: (Snack Food Seasonings Case)Document48 pagesSeasoning Formulation: (Snack Food Seasonings Case)Pitra CharesnaNo ratings yet
- LTspice TutorialDocument29 pagesLTspice TutorialvlsijpNo ratings yet
- PSIM User ManualDocument310 pagesPSIM User Manualnguyen hunghungNo ratings yet
- 3 - DiodesDocument15 pages3 - DiodesMaria FioriNo ratings yet
- K P GroupDocument13 pagesK P GroupMihrak SafirNo ratings yet
- Module 2-AppetizersDocument14 pagesModule 2-AppetizersAlysa Erl Julienne N. MandapNo ratings yet
- Cookery 11-12 Quarter 3 Week 1 Las 3Document1 pageCookery 11-12 Quarter 3 Week 1 Las 3Sittie Raina SalipadaNo ratings yet
- Modelling of Vlsi DevicesDocument19 pagesModelling of Vlsi DevicesManish DahiyaNo ratings yet
- Mediterranean DietDocument4 pagesMediterranean DietYazen Joudeh100% (6)















































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5824)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Production & Export of Spices in Sri LankaDocument13 pagesProduction & Export of Spices in Sri Lankahasithrock75% (4)
- SATVAM-A Project ReportDocument79 pagesSATVAM-A Project ReportDhruvil Gajjar100% (2)
- Layout Solns 3Document12 pagesLayout Solns 3VIKRAM KUMARNo ratings yet
- Paracetamol Dosing Paeds v1 Nov 21Document1 pageParacetamol Dosing Paeds v1 Nov 21gul jahanNo ratings yet
- Project FormittingDocument61 pagesProject Formittinggul jahanNo ratings yet
- PHYS3500Document3 pagesPHYS3500gul jahanNo ratings yet
- Amplifier & OcillatorDocument109 pagesAmplifier & Ocillatorgul jahanNo ratings yet
- Seminario StellatoDocument35 pagesSeminario Stellatogul jahanNo ratings yet
- McLeanA SessionIII P04Document1 pageMcLeanA SessionIII P04gul jahanNo ratings yet
- Polarization Division Multiplexed System For VLC Using RGB LEDsDocument5 pagesPolarization Division Multiplexed System For VLC Using RGB LEDsgul jahanNo ratings yet
- Coupled OscillatorsDocument5 pagesCoupled Oscillatorsgul jahanNo ratings yet
- OscillatorDocument5 pagesOscillatorgul jahanNo ratings yet
- Statistical and Thermal Physics Fundamentals and ApplicationsDocument13 pagesStatistical and Thermal Physics Fundamentals and Applicationsgul jahanNo ratings yet
- For Printing Ringbind A4Document78 pagesFor Printing Ringbind A4Consiso BallarNo ratings yet
- The Modern Ayurvedic Cookbook - Healthful, Healing Recipes For Life (PDFDrive)Document700 pagesThe Modern Ayurvedic Cookbook - Healthful, Healing Recipes For Life (PDFDrive)8btdmkdx46No ratings yet
- Pspice TutorialDocument56 pagesPspice TutorialCutie0% (1)
- Atlas1 PDFDocument400 pagesAtlas1 PDFtrieu tranNo ratings yet
- Finamill Brand Guidelines: October 9, 2019Document13 pagesFinamill Brand Guidelines: October 9, 2019Md Roknuzzaman khanNo ratings yet
- XJ 1861 Naxos Xerjoff Perfume - A Fragrance For Women and Men 2015Document1 pageXJ 1861 Naxos Xerjoff Perfume - A Fragrance For Women and Men 2015yuchenguo12No ratings yet
- SedraSmith8e Chapter 04 SpiceProblemGuideDocument5 pagesSedraSmith8e Chapter 04 SpiceProblemGuide辰.No ratings yet
- Food and Nutrition G10 - 12 PDFDocument29 pagesFood and Nutrition G10 - 12 PDFDøps Maløne86% (21)
- The Plant Resources of South-East Asia (PROSEA)Document7 pagesThe Plant Resources of South-East Asia (PROSEA)herni rahmayantiNo ratings yet
- Semiconductor Module Users GuideDocument294 pagesSemiconductor Module Users GuideValerioApicellaNo ratings yet
- Semiconductor Module Users GuideDocument318 pagesSemiconductor Module Users GuideR YNo ratings yet
- Export of Spices To Uk - IB FinalDocument42 pagesExport of Spices To Uk - IB Finalrohitkolekar100% (1)
- Kerala - Worksheet FinalDocument3 pagesKerala - Worksheet FinalPia KhannaNo ratings yet
- Substitutions For Cooking - NYT CookingDocument6 pagesSubstitutions For Cooking - NYT CookingDejan StojadinovićNo ratings yet
- Haleem Recipe Fox LifeDocument2 pagesHaleem Recipe Fox LifeswapnilnemadeNo ratings yet
- Welcome To The Department of Food & Drug Administration, Uttar PradeshDocument9 pagesWelcome To The Department of Food & Drug Administration, Uttar PradeshUtk AgNo ratings yet
- Sausage MakingDocument135 pagesSausage Makingmarcela33j9603No ratings yet
- Circuit Simulation Using SPICEDocument18 pagesCircuit Simulation Using SPICEMagnanil GoswamiNo ratings yet
- Seasoning Formulation: (Snack Food Seasonings Case)Document48 pagesSeasoning Formulation: (Snack Food Seasonings Case)Pitra CharesnaNo ratings yet
- LTspice TutorialDocument29 pagesLTspice TutorialvlsijpNo ratings yet
- PSIM User ManualDocument310 pagesPSIM User Manualnguyen hunghungNo ratings yet
- 3 - DiodesDocument15 pages3 - DiodesMaria FioriNo ratings yet
- K P GroupDocument13 pagesK P GroupMihrak SafirNo ratings yet
- Module 2-AppetizersDocument14 pagesModule 2-AppetizersAlysa Erl Julienne N. MandapNo ratings yet
- Cookery 11-12 Quarter 3 Week 1 Las 3Document1 pageCookery 11-12 Quarter 3 Week 1 Las 3Sittie Raina SalipadaNo ratings yet
- Modelling of Vlsi DevicesDocument19 pagesModelling of Vlsi DevicesManish DahiyaNo ratings yet
- Mediterranean DietDocument4 pagesMediterranean DietYazen Joudeh100% (6)