Download as pdf or txt
You might also like
- Commercial Checklist-Print - 2008 Nec - 08-28-08Document23 pagesCommercial Checklist-Print - 2008 Nec - 08-28-08akiferindrariskyNo ratings yet
- DC MotorsDocument42 pagesDC MotorsArabella SanchezNo ratings yet
- Energy Conversion One: Chapter NineDocument29 pagesEnergy Conversion One: Chapter NinejennybunnyomgNo ratings yet
- Characteristics of DC Series MotorDocument4 pagesCharacteristics of DC Series Motoratharvamande2003No ratings yet
- Shri Dadaji Institute of Technology & Science: Seminar OnDocument18 pagesShri Dadaji Institute of Technology & Science: Seminar OnJayesh JainNo ratings yet
- Induction Motor Equivalent CircuitDocument54 pagesInduction Motor Equivalent CircuitWinston LibangaNo ratings yet
- MotorDocument12 pagesMotorAbdullahil KafiNo ratings yet
- Unit Ii Drive ChaacteristicsDocument26 pagesUnit Ii Drive Chaacteristicssaravanakmar vNo ratings yet
- Characteristics of DC Motor: 1. Torque-Armature Current CharacteristicsDocument8 pagesCharacteristics of DC Motor: 1. Torque-Armature Current CharacteristicsBilbo BagginsNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- DC MotorsDocument39 pagesDC Motorsapi-3827132100% (11)
- W1 - Characteristics of DC Motor - Module 3, Topic 1,2Document15 pagesW1 - Characteristics of DC Motor - Module 3, Topic 1,2Anand NirupNo ratings yet
- PROJCTDocument32 pagesPROJCTSwati Agarwal100% (1)
- Speed Control of DC Machine: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalDocument73 pagesSpeed Control of DC Machine: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalVenomNo ratings yet
- DC Motor Part IIIDocument26 pagesDC Motor Part IIIMohd YasirNo ratings yet
- Control Material Module IIDocument15 pagesControl Material Module IIAbiodun MustaphaNo ratings yet
- Speed DC MotorDocument35 pagesSpeed DC MotorDienar Adiose AljahezNo ratings yet
- Problemas Con MotoresDocument34 pagesProblemas Con MotoresJohn HuaricapchaNo ratings yet
- DC MachinesDocument19 pagesDC MachinesMoses MberwaNo ratings yet
- DC Motors: - Construction Very Similar To A DC GeneratorDocument35 pagesDC Motors: - Construction Very Similar To A DC GeneratorDeepak Ganachari100% (1)
- SPE 2321 Lecture 3 & 4 and 5Document75 pagesSPE 2321 Lecture 3 & 4 and 5Martinez MutaiNo ratings yet
- DC Motor Drive: - General Concept - Speed Control - SCR Drives - Switched-Mode DC DrivesDocument34 pagesDC Motor Drive: - General Concept - Speed Control - SCR Drives - Switched-Mode DC DrivesMohammed- KannanNo ratings yet
- Lecture No 3Document33 pagesLecture No 3Walid salamaNo ratings yet
- DC Machine ConnectionDocument12 pagesDC Machine Connectionmohamed orifNo ratings yet
- DC MotorDocument15 pagesDC Motorptarwatkar123No ratings yet
- Chp5 DC Motor DrivesDocument38 pagesChp5 DC Motor Drivesblaze emberNo ratings yet
- Actuators IIIDocument30 pagesActuators IIIJefri SinuratNo ratings yet
- Electrical Machines-I IIIDocument55 pagesElectrical Machines-I IIIadityassripadaNo ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- Class DutyDocument58 pagesClass DutyHarsha AnantwarNo ratings yet
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- Induction and Permanent Magnets Synchronous MachinesDocument44 pagesInduction and Permanent Magnets Synchronous MachinesAnirudh ChagiNo ratings yet
- 9-12sept2020 DC Motor DONEDocument9 pages9-12sept2020 DC Motor DONEKaushik KunaleNo ratings yet
- Lab 07 - DC MotorsDocument9 pagesLab 07 - DC MotorsChamila SumathiratnaNo ratings yet
- Chapter 5Document86 pagesChapter 5sapnarauthanNo ratings yet
- Wa0002Document17 pagesWa0002RahulNo ratings yet
- Department of Electrical and Computer EngineeringDocument35 pagesDepartment of Electrical and Computer EngineeringMarlon BoucaudNo ratings yet
- Unit-Ii DC Machines: ConstructionDocument68 pagesUnit-Ii DC Machines: ConstructionbalaNo ratings yet
- Uee 3Document29 pagesUee 3SURAJ KUMAR PATRANo ratings yet
- Electrical - Module 3 - Part 66 - DAY 24Document32 pagesElectrical - Module 3 - Part 66 - DAY 24irene pafraNo ratings yet
- Chapter 2 Det50063 - Speed Control of DC MotorDocument54 pagesChapter 2 Det50063 - Speed Control of DC MotorFara Fara100% (1)
- Lecture#7Document43 pagesLecture#720pwmct0739No ratings yet
- Energy Conversion One: Chapter NineDocument15 pagesEnergy Conversion One: Chapter NineSneh Deep SKNo ratings yet
- EV Class NotesDocument30 pagesEV Class NotesVinod BabaleshwarNo ratings yet
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyNo ratings yet
- Starting and Speed Control of 3 Phase Induction MotorDocument38 pagesStarting and Speed Control of 3 Phase Induction MotorSree ShobhaNo ratings yet
- Final Control ElementsDocument76 pagesFinal Control ElementsUtkarsh ModiNo ratings yet
- Chapter 5Document86 pagesChapter 5Selva SamNo ratings yet
- Chapter 4Document24 pagesChapter 4javeria zafeerNo ratings yet
- Energy Conversion One: Synchronous MotorsDocument21 pagesEnergy Conversion One: Synchronous MotorsSaurav KafleNo ratings yet
- DC Shunt Motor Speed ControlDocument7 pagesDC Shunt Motor Speed Controleric wahomeNo ratings yet
- DC Shunt MotorDocument9 pagesDC Shunt MotorPeterNo ratings yet
- DC - MOTOR by ML KhondokarDocument36 pagesDC - MOTOR by ML KhondokarMd Shahadat HossainNo ratings yet
- IDS NewDocument128 pagesIDS NewShahbaz Ali100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Siemens Circuit Protection - MCBs PDFDocument34 pagesSiemens Circuit Protection - MCBs PDFshaktikumarjhaNo ratings yet
- Pantografo Coelme 1Document2 pagesPantografo Coelme 1Alexander GuzmánNo ratings yet
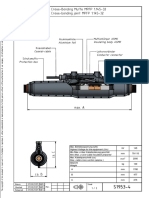
- Crossbonding Joint S1953-4 MPFP1.145-32Document2 pagesCrossbonding Joint S1953-4 MPFP1.145-32olgi cheifNo ratings yet
- Omron MM - Ds - e - 5 - 4 - csm57Document17 pagesOmron MM - Ds - e - 5 - 4 - csm57TaQuangDucNo ratings yet
- Top DriveDocument93 pagesTop DriveBRAHIM FEKAOUNINo ratings yet
- Half Wave and Full Wave RectifiersDocument8 pagesHalf Wave and Full Wave RectifiersRavindra SinghNo ratings yet
- TeSys GV2 GV2ME02Document2 pagesTeSys GV2 GV2ME02Victor ChuaNo ratings yet
- Dictionary - ElectricalDocument100 pagesDictionary - ElectricalSeb668No ratings yet
- Lbskit: Amted306003En - InddDocument28 pagesLbskit: Amted306003En - InddEduardo Luiz Soares CostaNo ratings yet
- Worksheet 3.2 - ElectronicsDocument2 pagesWorksheet 3.2 - ElectronicsKaela SamonteNo ratings yet
- Uploads Product Rishmaster EM3490 1PH Manual PDFDocument2 pagesUploads Product Rishmaster EM3490 1PH Manual PDFKo PaukNo ratings yet
- DOD Overdrive Preamp 250 (Single OpAmp)Document4 pagesDOD Overdrive Preamp 250 (Single OpAmp)BabarNo ratings yet
- Digital Multimeter EM420BDocument44 pagesDigital Multimeter EM420BFernando LlacayNo ratings yet
- CM-P8 12200 EN SKF Static Motor Analyzer Baker DX Data Sheet PDFDocument4 pagesCM-P8 12200 EN SKF Static Motor Analyzer Baker DX Data Sheet PDFFelix AcebeyNo ratings yet
- Split Type Air Conditioner: Models Indoor Unit Outdoor UnitDocument63 pagesSplit Type Air Conditioner: Models Indoor Unit Outdoor UnitAlexisNo ratings yet
- 00054443020-Golf Vento - Basic Equipment From August 1995Document484 pages00054443020-Golf Vento - Basic Equipment From August 1995Bruno RedonNo ratings yet
- Electric Generator Class 12 ProjectDocument24 pagesElectric Generator Class 12 ProjectDeepanshu VermaNo ratings yet
- Instruction Manual FOR Voltage Regulator Model: AVC63-4: Confidential InformationDocument3 pagesInstruction Manual FOR Voltage Regulator Model: AVC63-4: Confidential InformationgovindarulNo ratings yet
- MR - Altaf Ahmad Associate Engineer Mechanical: Bachelor of Engineering Technology MechanicalDocument3 pagesMR - Altaf Ahmad Associate Engineer Mechanical: Bachelor of Engineering Technology Mechanicalapses 9926No ratings yet
- AICTE B.Tech EE I Sem NewDocument2 pagesAICTE B.Tech EE I Sem NewKrishnaNo ratings yet
- Relay de Trabajo Continuo para Barredoras.Document4 pagesRelay de Trabajo Continuo para Barredoras.Anonymous KOtSfT6qNo ratings yet
- 08 Starters1Document48 pages08 Starters1ravibabumarpallyNo ratings yet
- 36 kV 250 А DIN 42531 Outdoor Transformer Bushing: Type Class a c g l1 Outdoor (f) Indoor (i)Document1 page36 kV 250 А DIN 42531 Outdoor Transformer Bushing: Type Class a c g l1 Outdoor (f) Indoor (i)Yigit SarıkayaNo ratings yet
- (Capacitor) 0131988678 - pp12Document40 pages(Capacitor) 0131988678 - pp12maprof100% (1)
- DC Shunt Motor.Document7 pagesDC Shunt Motor.Ghost ReaconNo ratings yet
- AGC 3&4&200 Serise Single Gen-Set Application With Deif Template 20.12.2012Document26 pagesAGC 3&4&200 Serise Single Gen-Set Application With Deif Template 20.12.2012Dominic DomNo ratings yet
- Euchner Esm Ba 301 - Bfb0471cca PDFDocument39 pagesEuchner Esm Ba 301 - Bfb0471cca PDFJorge SilvaNo ratings yet
- Kenr2713kenr2713 02 SisDocument2 pagesKenr2713kenr2713 02 SisChakrouneNo ratings yet
- NTE6232 Powerblock Module: DescriptionDocument2 pagesNTE6232 Powerblock Module: DescriptionTulio Ernesto HernándezNo ratings yet