Download as pdf or txt
You might also like
- College Physics 4th Edition Giambattista Test Bank 1Document31 pagesCollege Physics 4th Edition Giambattista Test Bank 1tracy100% (43)
- Finite Elements in Analysis and Design: Fernando G. Flores, Liz G. Nallim, Sergio OllerDocument14 pagesFinite Elements in Analysis and Design: Fernando G. Flores, Liz G. Nallim, Sergio OllerGeethika KadhamNo ratings yet
- Karihaloo 2001 Computers & StructuresDocument16 pagesKarihaloo 2001 Computers & StructuresPetrescu IrinaNo ratings yet
- Free Vib 1Document20 pagesFree Vib 1Sowjanya KametyNo ratings yet
- A High Order Theory For The Analysis ofDocument14 pagesA High Order Theory For The Analysis ofgrygoriiNo ratings yet
- 1 s2.0 S0263823122001033 MainDocument17 pages1 s2.0 S0263823122001033 MainNhon NguyenNo ratings yet
- Composite Structures 66 261 268 2004Document8 pagesComposite Structures 66 261 268 2004Isidoro CorreiaNo ratings yet
- Mantari 2012Document11 pagesMantari 2012Phạm Đình NguyệnNo ratings yet
- Diffuse Field Transmission Into Infinite Sandwich Composite and Laminate Composite CylindersDocument34 pagesDiffuse Field Transmission Into Infinite Sandwich Composite and Laminate Composite Cylindersmuhammedbusra6716No ratings yet
- Advances in The Formulation of The Rotation-Free Basic Shell TriangleDocument38 pagesAdvances in The Formulation of The Rotation-Free Basic Shell Triangleaj2000_renNo ratings yet
- 1 s2.0 S2352012421009048 MainDocument17 pages1 s2.0 S2352012421009048 MainNhon NguyenNo ratings yet
- Thick Plate Shear DeformationDocument12 pagesThick Plate Shear DeformationHasanain AlmusawiNo ratings yet
- Computers Structures 76 299 317 2000Document19 pagesComputers Structures 76 299 317 2000Isidoro CorreiaNo ratings yet
- Higher Order Models On The Eigenfrequency Analysis and Optimal Design of Laminated Composite StructuresDocument17 pagesHigher Order Models On The Eigenfrequency Analysis and Optimal Design of Laminated Composite Structuresnii20597No ratings yet
- Linear and Geometrically Nonlinear Analysis of Plates and Shells by A New Refined Non-Conforming Triangular Plate/shell ElementDocument12 pagesLinear and Geometrically Nonlinear Analysis of Plates and Shells by A New Refined Non-Conforming Triangular Plate/shell ElementJorge PalominoNo ratings yet
- Computers and Geotechnics: A. Riahi, J.H. Curran, H. BidhendiDocument12 pagesComputers and Geotechnics: A. Riahi, J.H. Curran, H. Bidhendizimbazimba75No ratings yet
- Accepted ManuscriptDocument47 pagesAccepted ManuscriptficuniNo ratings yet
- Analytical Solutions For Free Vibration of Laminated Composite and Sandwich Plates Based On A Higher-Order Re®ned TheoryDocument13 pagesAnalytical Solutions For Free Vibration of Laminated Composite and Sandwich Plates Based On A Higher-Order Re®ned TheoryPavan KishoreNo ratings yet
- 1-Composite Structures - 2016 - 5.407Document25 pages1-Composite Structures - 2016 - 5.407Sajad MostafaviNo ratings yet
- Analysis of Laminated Composite Beams Using Layerwise Displacement Theories PDFDocument13 pagesAnalysis of Laminated Composite Beams Using Layerwise Displacement Theories PDFmrjnhowardNo ratings yet
- Kapoor 2013Document12 pagesKapoor 2013ficuniNo ratings yet
- Analytical Solutions For The Static Analysis of Laminated Composite and Sandwich Plates Based On A Higher Order Refined TheoryDocument16 pagesAnalytical Solutions For The Static Analysis of Laminated Composite and Sandwich Plates Based On A Higher Order Refined TheoryBilel AydiNo ratings yet
- On A Finite Element Model For The Analysis of Through Cracks in Laminated Anisotropic Cylindrical ShellsDocument16 pagesOn A Finite Element Model For The Analysis of Through Cracks in Laminated Anisotropic Cylindrical ShellsRavi TejaNo ratings yet
- Vibro-Acoustic Optimisation of Sandwich Panels Using The Wave /finite Element MethodDocument14 pagesVibro-Acoustic Optimisation of Sandwich Panels Using The Wave /finite Element MethodJean AbelaNo ratings yet
- Modeling of Lamb Waves in Composites Using New Third-Order Plate TheoriesDocument15 pagesModeling of Lamb Waves in Composites Using New Third-Order Plate TheoriesesatecNo ratings yet
- A 3-D Finite Element For Laminated Composites With 2-D Kinematic ConstraintstDocument9 pagesA 3-D Finite Element For Laminated Composites With 2-D Kinematic ConstraintstFerNo ratings yet
- Fulltext PDFDocument21 pagesFulltext PDFJogger JamesNo ratings yet
- Analyzing Laminated Structures From Fibre-Reinforced Composite Material - An AssessmentDocument19 pagesAnalyzing Laminated Structures From Fibre-Reinforced Composite Material - An Assessmentom_prakash1986No ratings yet
- Equivalent Models of Corrugated Laminates For Morphing Skins - Xia, FriswellDocument10 pagesEquivalent Models of Corrugated Laminates For Morphing Skins - Xia, FriswellLucian GiliaNo ratings yet
- Anupam ChakrabartiDocument16 pagesAnupam ChakrabartiSamiullah MohammedNo ratings yet
- 1 s2.0 S2666496821000121 MainDocument10 pages1 s2.0 S2666496821000121 MainAbdullah AbdullahNo ratings yet
- Computers and Structures: C. Martín Saravia, Sebastián P. Machado, Víctor H. CortínezDocument15 pagesComputers and Structures: C. Martín Saravia, Sebastián P. Machado, Víctor H. CortínezKhalil DeghoumNo ratings yet
- Extended Finite Element Method For Cohesive Crack Growth: Nicolas Mo Ees, Ted BelytschkoDocument21 pagesExtended Finite Element Method For Cohesive Crack Growth: Nicolas Mo Ees, Ted BelytschkoZahi AekNo ratings yet
- Composite Structures: Quantian Luo, Liyong TongDocument11 pagesComposite Structures: Quantian Luo, Liyong TongSaid DjaballahNo ratings yet
- Composite Structures: Lars Fiedler, Walter Lacarbonara, Fabrizio VestroniDocument9 pagesComposite Structures: Lars Fiedler, Walter Lacarbonara, Fabrizio VestroniAfter DarkNo ratings yet
- 2002 Moes EFM XFEM CohesiveDocument21 pages2002 Moes EFM XFEM CohesiveAsma BousameNo ratings yet
- Dynamic Analysis of Fluid-Shell Structures: 15 International Conference On Experimental MechanicsDocument41 pagesDynamic Analysis of Fluid-Shell Structures: 15 International Conference On Experimental MechanicsVSRI1993No ratings yet
- Computers and Structures: J.S. Moita, A.L. Araújo, P. Martins, C.M. Mota Soares, C.A. Mota SoaresDocument8 pagesComputers and Structures: J.S. Moita, A.L. Araújo, P. Martins, C.M. Mota Soares, C.A. Mota SoaresPhamNo ratings yet
- 1 s2.0 S0263822314002785 MainDocument9 pages1 s2.0 S0263822314002785 Main1711076053No ratings yet
- A New Approach For The Large de Ection Finite Element Analysis of Isotropic and Composite Plates With Arbitrary Orientated StiffenersDocument14 pagesA New Approach For The Large de Ection Finite Element Analysis of Isotropic and Composite Plates With Arbitrary Orientated StiffenersMuhammadAwaisNo ratings yet
- Overall Behaviour of Shallow Singly-Curved Sandwich PanelsDocument15 pagesOverall Behaviour of Shallow Singly-Curved Sandwich PanelsSanghita BiswasNo ratings yet
- Finite Deformation Continuum Model For Single-Walled Carbon NanotubesDocument9 pagesFinite Deformation Continuum Model For Single-Walled Carbon NanotubesEduardo GarciaNo ratings yet
- Langford PH880173Document16 pagesLangford PH880173Ana Maria TrandafirNo ratings yet
- Design of Fiber Reinforced Composite PreDocument13 pagesDesign of Fiber Reinforced Composite Premirza_munir_baig995No ratings yet
- Swirling 3Document10 pagesSwirling 3Abdullah KaymakcıNo ratings yet
- Flutter Analysis of Cantilever Composite Plates in SubsonicDocument8 pagesFlutter Analysis of Cantilever Composite Plates in SubsonicArivarasan JCNo ratings yet
- 2012 Asce 1Document6 pages2012 Asce 1triple tripleNo ratings yet
- Oktem Levy Type Fourier 2007Document14 pagesOktem Levy Type Fourier 2007Adnan AhmedNo ratings yet
- 0004 MengDocument16 pages0004 MengMridul ChitranshiNo ratings yet
- Reference 6Document16 pagesReference 6ntpcforgeneraluse88No ratings yet
- Composite Structures: Huu-Tai Thai, Dong-Ho ChoiDocument10 pagesComposite Structures: Huu-Tai Thai, Dong-Ho ChoiAlan TuringNo ratings yet
- Buckling - EquationsDocument66 pagesBuckling - EquationsricardoborNo ratings yet
- Vibration Analysis of Delaminated Composite Beams and Plates Using A Higher-Order Fnite ElementDocument25 pagesVibration Analysis of Delaminated Composite Beams and Plates Using A Higher-Order Fnite ElementmtajikNo ratings yet
- B Let Zinger 2000Document14 pagesB Let Zinger 2000interest100100% (1)
- Laminate CompositeDocument9 pagesLaminate Compositeitsaashish12gmailcomNo ratings yet
- MASARATI Multibody Analysis of A Micro Aerial Vehicle Flapping WingDocument17 pagesMASARATI Multibody Analysis of A Micro Aerial Vehicle Flapping Wingtco3635No ratings yet
- Gupta, PradyumnaDocument22 pagesGupta, PradyumnadonaNo ratings yet
- Assessment of Shear Deformation Theories For Multilayered Composite PlatesDocument13 pagesAssessment of Shear Deformation Theories For Multilayered Composite Platesiname11No ratings yet
- International Journal of Mechanical Sciences: Chong Li, Hui-Shen Shen, Hai Wang, Zhefeng YuDocument10 pagesInternational Journal of Mechanical Sciences: Chong Li, Hui-Shen Shen, Hai Wang, Zhefeng Yuali_biscoeatNo ratings yet
- Large Deformation Finite Element Analysis OF Laminated Circular Composite PlatesDocument6 pagesLarge Deformation Finite Element Analysis OF Laminated Circular Composite PlatesyasameenNo ratings yet
- High Voltage With Flexible Termination System (HV FT-CAP) X7R Dielectric, 500VDC-3000VDC (Commercial Grade)Document18 pagesHigh Voltage With Flexible Termination System (HV FT-CAP) X7R Dielectric, 500VDC-3000VDC (Commercial Grade)dovesnest_inNo ratings yet
- USCO CatalogDocument56 pagesUSCO CatalogDavid LeviNo ratings yet
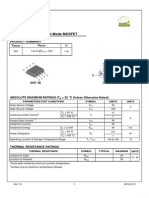
- N-Channel Enhancement Mode MOSFET: Product SummaryDocument5 pagesN-Channel Enhancement Mode MOSFET: Product SummaryTony RodriguesNo ratings yet
- Me6411 Manufacturing Technology-II Lab ManualDocument35 pagesMe6411 Manufacturing Technology-II Lab ManualdibyenindusNo ratings yet
- Factors Affecting Potential and Kinetic Energy - 012431Document26 pagesFactors Affecting Potential and Kinetic Energy - 012431kathlene Mae TrinidadNo ratings yet
- CH - 2 p1 DynaDocument11 pagesCH - 2 p1 DynaFikadu BelaynehNo ratings yet
- Materials: Ffect of Different Compatibilizers On The Properties /poly (Butylene Adipate-CoDocument16 pagesMaterials: Ffect of Different Compatibilizers On The Properties /poly (Butylene Adipate-CoSiddharthBhasneyNo ratings yet
- Master SpecificationsDocument395 pagesMaster SpecificationsHaymanot BaynesagnNo ratings yet
- Chapter - 15 A Level Physics WB MSDocument4 pagesChapter - 15 A Level Physics WB MSmichelle winataNo ratings yet
- 2020-21 G12 Mock AA-HL Calculator Practice Questions ANSWERSDocument23 pages2020-21 G12 Mock AA-HL Calculator Practice Questions ANSWERS0010048No ratings yet
- Current Logic 1000V - 24V Power SupplyDocument2 pagesCurrent Logic 1000V - 24V Power Supplyraza239No ratings yet
- Fujifilm Eluxeo BL 7000Document78 pagesFujifilm Eluxeo BL 7000AngeloNo ratings yet
- p112 Lecture2Document22 pagesp112 Lecture2Othniel SulpicoNo ratings yet
- Lecture - 8: Fluid Motion: Streamlines EtcDocument13 pagesLecture - 8: Fluid Motion: Streamlines Etcrohit singhNo ratings yet
- Linear Accelerator Acceptance Testing and CommissioningDocument17 pagesLinear Accelerator Acceptance Testing and CommissioningSaamyNo ratings yet
- MPN Ver6Document3 pagesMPN Ver6annaNo ratings yet
- Prelim Examination Set A Solutions PDFDocument6 pagesPrelim Examination Set A Solutions PDFOxy GenNo ratings yet
- 10th Class Past Papers BISE Sahiwal G 2 Previous Papers NOTESPK CompressedDocument16 pages10th Class Past Papers BISE Sahiwal G 2 Previous Papers NOTESPK CompressedFaisal RasheedNo ratings yet
- (L5) - (JLD 4.0) - Solutions - 12th MayDocument35 pages(L5) - (JLD 4.0) - Solutions - 12th MayVidhan jainNo ratings yet
- Voith ManualDocument15 pagesVoith Manualscploperation.2x50 CommonNo ratings yet
- Ring FoundationDocument4 pagesRing Foundationjorge01100% (2)
- CN-DT-006 - ENG - Geocells vs. Mattresses - Rev. 0Document1 pageCN-DT-006 - ENG - Geocells vs. Mattresses - Rev. 0szemianNo ratings yet
- Modern Railway TrackDocument15 pagesModern Railway TrackasithaNo ratings yet
- UNITED Y8PCugjDocument2 pagesUNITED Y8PCugjFadhilNo ratings yet
- Wavelengths and Frequencies With A Quincke TubeDocument5 pagesWavelengths and Frequencies With A Quincke TubeJose GalvanNo ratings yet
- Class 11 Imp NotesDocument10 pagesClass 11 Imp NotesZAVI0% (1)
- Global PositioningDocument6 pagesGlobal PositioningAkash BansalNo ratings yet
- A Review On A Gear Tooth Failure AnalysisDocument13 pagesA Review On A Gear Tooth Failure AnalysisKKDhNo ratings yet
- Physics 2 (A) KifungiloDocument6 pagesPhysics 2 (A) KifungiloDaniel MapogoNo ratings yet