Download as pdf or txt
You might also like
- NAPLEX NoteDocument58 pagesNAPLEX Notebapimirab654100% (1)
- T-Test ProblemsDocument5 pagesT-Test Problemsrabbi sodhiNo ratings yet
- Import Export Business PlanDocument25 pagesImport Export Business PlanHimadri Himu100% (1)
- SearchDocument10 pagesSearchKadali Lakshmi NirmalaNo ratings yet
- Chapter 03Document74 pagesChapter 03api-3705912No ratings yet
- Ai - Module 2 - Week - 3Document87 pagesAi - Module 2 - Week - 3Shreyas MuraliNo ratings yet
- Lecture05-AI-UMT-Spring 24Document25 pagesLecture05-AI-UMT-Spring 24arslanshaheen248No ratings yet
- State Space Search Lecture # 2Document34 pagesState Space Search Lecture # 2nazim aliNo ratings yet
- ABLA-R (Folha de Registro)Document6 pagesABLA-R (Folha de Registro)Amanda Alves SantosNo ratings yet
- Chapter03 PDFDocument63 pagesChapter03 PDFGoutham Surya ArukondaNo ratings yet
- Chapitre 2Document80 pagesChapitre 2Chaima BelhediNo ratings yet
- CHAPTER 3 Problem SolvingDocument30 pagesCHAPTER 3 Problem SolvingAlfa May BuracNo ratings yet
- Mathematical ProbabilityDocument36 pagesMathematical ProbabilityCamille100% (1)
- Problems, Problem Spaces and SearchDocument31 pagesProblems, Problem Spaces and Searchvirgulatiit21a1068No ratings yet
- Daa QBDocument3 pagesDaa QBsaurabhasnare14No ratings yet
- 25 Angle ENG GRAMMAR BOOKDocument116 pages25 Angle ENG GRAMMAR BOOKilesh patelNo ratings yet
- Pen Tool 2Document1 pagePen Tool 2caleb tranNo ratings yet
- 7.1 Notes and HW - ProportionsDocument4 pages7.1 Notes and HW - ProportionsPandu DoradlaNo ratings yet
- Adding and Subtracting Fractions WorksheetsDocument13 pagesAdding and Subtracting Fractions WorksheetsCaroline Deniega Sandoval0% (1)
- Chap 4 Part B Slide1-30Document45 pagesChap 4 Part B Slide1-30Ahmed HussainNo ratings yet
- Lesson-5 - Permutation and CombinationDocument48 pagesLesson-5 - Permutation and CombinationLUMA-AS, Gerald P.100% (2)
- Chapter 1: Real NumberDocument9 pagesChapter 1: Real NumbervimalNo ratings yet
- Problems, Problem Spaces and SearchDocument54 pagesProblems, Problem Spaces and SearchTania CENo ratings yet
- Outputs: 1813 Chavan Meet Dinesh: Practicall 4imgDocument10 pagesOutputs: 1813 Chavan Meet Dinesh: Practicall 4imgAryan ShenoyNo ratings yet
- Title # Pages Mark Notes (Modeling, Inv, Topic.) : Example 1Document1 pageTitle # Pages Mark Notes (Modeling, Inv, Topic.) : Example 1microbialdevaNo ratings yet
- Introduction To AI Lecture 3: Uninformed Search: Heshaam Faili Hfaili@ece - Ut.ac - Ir University of TehranDocument64 pagesIntroduction To AI Lecture 3: Uninformed Search: Heshaam Faili Hfaili@ece - Ut.ac - Ir University of Tehranlamba5No ratings yet
- Cumulative Frequency Graphs: DR FrostDocument37 pagesCumulative Frequency Graphs: DR FrostABU HASHEMNo ratings yet
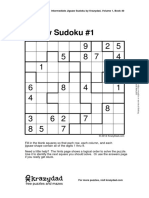
- Intermediate Jigsaw Sudoku by Krazydad, Volume 1, Book 40Document10 pagesIntermediate Jigsaw Sudoku by Krazydad, Volume 1, Book 40Jessanin CalipayanNo ratings yet
- Grammar Friends 4 SBDocument82 pagesGrammar Friends 4 SBsielaenglish.driveNo ratings yet
- State Space Search: Week 2Document26 pagesState Space Search: Week 2bilalNo ratings yet
- Sta416 3 2Document21 pagesSta416 3 2muhd.ajimmehNo ratings yet
- Solutions 2022Document13 pagesSolutions 2022dolosayeb3No ratings yet
- Inteligensia BuatanDocument23 pagesInteligensia BuatanDesca T PaulusNo ratings yet
- Chapter2 State-Space Search Part1Document47 pagesChapter2 State-Space Search Part1M. Saad JumaniNo ratings yet
- CHAPTER 8 - The Mathematical SystemDocument28 pagesCHAPTER 8 - The Mathematical SystemSeymour ArcegaNo ratings yet
- 4multiplication: (Mu Ltiplication TablesDocument12 pages4multiplication: (Mu Ltiplication TablesHollis CokerNo ratings yet
- Exponential Growth and Decay Part3Document30 pagesExponential Growth and Decay Part3BeatriceCarlisleNo ratings yet
- Moule 3 Problem SolvingDocument130 pagesMoule 3 Problem SolvingPrashant KawatheNo ratings yet
- Chapter 06 Solving Problems by SearchingDocument53 pagesChapter 06 Solving Problems by SearchingMuhammad HuzaifaNo ratings yet
- You Have A Function Rand5 That Generates A Random Integer From 1 To 5. Use It To Write A Function Rand7 That Generates A Random Integer From 1 To 7Document9 pagesYou Have A Function Rand5 That Generates A Random Integer From 1 To 5. Use It To Write A Function Rand7 That Generates A Random Integer From 1 To 7RohitBhatiaNo ratings yet
- AI Chapter 2Document34 pagesAI Chapter 2biruckNo ratings yet
- Delhi Public School Harni: MathematicsDocument21 pagesDelhi Public School Harni: MathematicsAnkur_soniNo ratings yet
- Fractions and DecimalsDocument5 pagesFractions and DecimalsCts NarasaraopetNo ratings yet
- HandoutUninformedSearch PDFDocument14 pagesHandoutUninformedSearch PDFNabil AbdounNo ratings yet
- Mean, Median, Mode and Range Practice QuizDocument4 pagesMean, Median, Mode and Range Practice QuizKarthikeya ShukklaNo ratings yet
- Mathematics For Physics 2023. Chapter 4Document28 pagesMathematics For Physics 2023. Chapter 4Tuyết VânNo ratings yet
- AI Lecture 3Document37 pagesAI Lecture 3Bilal AbbasiNo ratings yet
- UNIT-II Trigonometry and Elementary FunctionsDocument151 pagesUNIT-II Trigonometry and Elementary FunctionsAnkit SinghNo ratings yet
- ME Math 10 Q1 0702 SGDocument20 pagesME Math 10 Q1 0702 SGdonnabelle isidroNo ratings yet
- Course Written by Richard E. Korf, UCLA. The Slides Were Made by Students of This Course From Bar-Ilan University, Tel-Aviv, IsraelDocument76 pagesCourse Written by Richard E. Korf, UCLA. The Slides Were Made by Students of This Course From Bar-Ilan University, Tel-Aviv, IsraelPranali MNo ratings yet
- A Radar Measures An Apparent Range of 7 Nmi When The Pr...Document1 pageA Radar Measures An Apparent Range of 7 Nmi When The Pr...AtifAliBukhariNo ratings yet
- Where WorldDocument2 pagesWhere Worldzjfm2qyxxpNo ratings yet
- A Coin Is Tossed and A Die Is Rolled. Find The Number of Outcomes For The Sequence of EventsDocument40 pagesA Coin Is Tossed and A Die Is Rolled. Find The Number of Outcomes For The Sequence of EventsD E L INo ratings yet
- Chapter 3 AIDocument73 pagesChapter 3 AIMULUKEN TILAHUNNo ratings yet
- Randomized Complete Block Design: Arif RahmanDocument34 pagesRandomized Complete Block Design: Arif RahmanMoh. Khafid Ridlo PratamaNo ratings yet
- Solving Problems by SearchingDocument67 pagesSolving Problems by SearchingDawit Shimeles TesfayeNo ratings yet
- Lec2 AiDocument28 pagesLec2 Aim88mrabetNo ratings yet
- GMF L6 Vocabulary Practice Answer KeyDocument2 pagesGMF L6 Vocabulary Practice Answer KeyThuNo ratings yet
- Effective Experimentation: For Scientists and TechnologistsFrom EverandEffective Experimentation: For Scientists and TechnologistsRating: 2 out of 5 stars2/5 (1)
- Mac Formatting ElCapDocument7 pagesMac Formatting ElCapJC SardiniaNo ratings yet
- 2thesisfinal 170811170156 PDFDocument72 pages2thesisfinal 170811170156 PDFJoshua BergoniaNo ratings yet
- BaristaDocument5 pagesBaristaAabbhas GargNo ratings yet
- Controlling Function of ManagementDocument32 pagesControlling Function of Managementnohel01No ratings yet
- Template Course Syllabus at 4ADocument6 pagesTemplate Course Syllabus at 4ARodilyn NoblezaNo ratings yet
- Japan AwardsDocument3 pagesJapan AwardsLeonard LyonsNo ratings yet
- Actividad 13 Evidencia 4 InglesDocument7 pagesActividad 13 Evidencia 4 InglesfredypiraconNo ratings yet
- Introduction To Public Switched Telephone Networks (PSTNS) : Computer Communication Study Guide Series BooksDocument47 pagesIntroduction To Public Switched Telephone Networks (PSTNS) : Computer Communication Study Guide Series BooksMasterAlbus3dNo ratings yet
- Engineered Wood Products and An Introduction To Timber Structural SystemsDocument7 pagesEngineered Wood Products and An Introduction To Timber Structural SystemsSang Keun YooNo ratings yet
- Integrated Mobility & Service Plan - TumakuruDocument20 pagesIntegrated Mobility & Service Plan - TumakuruVinay RajNo ratings yet
- Motion: This House Believes in Federal Philippines (I. Pro) : The Issuesinfrastructure and Technological DisadvantagesDocument7 pagesMotion: This House Believes in Federal Philippines (I. Pro) : The Issuesinfrastructure and Technological DisadvantagesAgie MarquezNo ratings yet
- Case Analysis: WAC Report: (HPCL-Driving Change Through Internal Communication)Document7 pagesCase Analysis: WAC Report: (HPCL-Driving Change Through Internal Communication)Parul VaryaniNo ratings yet
- Hang Tuah Medical Journal: Research ArtikelDocument9 pagesHang Tuah Medical Journal: Research ArtikelMaymay DamayNo ratings yet
- Trans World Airlines vs. CA G.R. No. 78656Document2 pagesTrans World Airlines vs. CA G.R. No. 78656Rhea CalabinesNo ratings yet
- Activity 1Document8 pagesActivity 1Philip Jansen GuarinNo ratings yet
- Kalinga University at A Glance 1Document40 pagesKalinga University at A Glance 1Pranav Shukla PNo ratings yet
- NEMA Motor Data Calculator - EEPDocument3 pagesNEMA Motor Data Calculator - EEPEngr TariqNo ratings yet
- Coupled Level-Set and Volume of Fluid (CLSVOF) Solver ForDocument18 pagesCoupled Level-Set and Volume of Fluid (CLSVOF) Solver ForBharath kumarNo ratings yet
- Implementation and Monitoring:: Assessing Performance in Contract RelationshipsDocument49 pagesImplementation and Monitoring:: Assessing Performance in Contract RelationshipsReddy SumanthNo ratings yet
- Career at PrachayDocument15 pagesCareer at PrachayGirish LakhotiyaNo ratings yet
- Transmitters To Detect Carbon Dioxide (Co)Document6 pagesTransmitters To Detect Carbon Dioxide (Co)Petar RudešNo ratings yet
- Mukesh Yadav InsurnaceDocument3 pagesMukesh Yadav InsurnaceTriangle Tower ConstructionNo ratings yet
- (LF303W) Pf-Em#53hd-303w Rev.a IvDocument4 pages(LF303W) Pf-Em#53hd-303w Rev.a IvPhung Cam VanNo ratings yet
- LKS1Document34 pagesLKS1Vijay SarojNo ratings yet
- Impact of GT, SFD and EIRP On System DesignDocument18 pagesImpact of GT, SFD and EIRP On System DesignExtreme DaysNo ratings yet
- Sump Well-20 KL PDFDocument3 pagesSump Well-20 KL PDFvisali garikapatiNo ratings yet
- Mining Contract - XufengDocument2 pagesMining Contract - XufengJEPH Manliguez EnteriaNo ratings yet
- Micro TeachingDocument7 pagesMicro TeachingMuhammed SahadNo ratings yet