
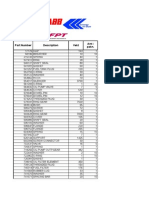
Tricycle Report
Tricycle Report
You might also like
- Toyota Engine 1grfe 4 0 Repair ManualDocument7 pagesToyota Engine 1grfe 4 0 Repair Manualjames100% (60)
- Flygt 3171 Service and Repair InstructionsDocument104 pagesFlygt 3171 Service and Repair InstructionsKEVIN SANTIAGO COLONNo ratings yet
- Flygt 2660.181: Service and Repair InstructionsDocument72 pagesFlygt 2660.181: Service and Repair InstructionsSandra Yadhit Higuera Archila100% (1)
- Rear-Mounted Range Shift Cylinder Rebuild T300Document20 pagesRear-Mounted Range Shift Cylinder Rebuild T300Hamilton MirandaNo ratings yet
- Startrac PRO Owners ManualDocument60 pagesStartrac PRO Owners ManualSmith Smen100% (1)
- A Study Guide: Released 2nd Edition 09/2018Document159 pagesA Study Guide: Released 2nd Edition 09/2018vinod reddy mNo ratings yet
- Medonic User Manual PDFDocument109 pagesMedonic User Manual PDFDinesh SreedharanNo ratings yet
- Farm DESIGN ManualDocument79 pagesFarm DESIGN Manualনাজমুল হক শাহিনNo ratings yet
- VW Passat B5 42-1 Rear Axle, FFDocument19 pagesVW Passat B5 42-1 Rear Axle, FFJosé Luis Ormeño100% (1)
- Iveco Spare PartsDocument509 pagesIveco Spare Partsjosephvanbac0% (2)
- sp1 de enDocument186 pagessp1 de enseblakrayapNo ratings yet
- Fedec Chap1 Training en Web 2010Document68 pagesFedec Chap1 Training en Web 2010aphexish100% (1)
- VW Passat b7 2011 Body Repair EngDocument381 pagesVW Passat b7 2011 Body Repair EngVictor Olmeda SarabiaNo ratings yet
- Final Baja MQP PaperDocument70 pagesFinal Baja MQP PaperNithinNo ratings yet
- Report of E-GovtDocument34 pagesReport of E-GovtFatima Tul ZahraNo ratings yet
- LTRSPG 2515 LGDocument80 pagesLTRSPG 2515 LGAla JebnounNo ratings yet
- Neurology Model of CareDocument292 pagesNeurology Model of CarejumabarrientosNo ratings yet
- Hantek 100Mhz 2 Channel Digital Storage Oscilloscope - Dso5102PDocument72 pagesHantek 100Mhz 2 Channel Digital Storage Oscilloscope - Dso5102PBranko JurakNo ratings yet
- Four Wheel Steering Mechanism SystemDocument39 pagesFour Wheel Steering Mechanism SystemZameer Ahmed GheewaleNo ratings yet
- Learn Dynamic Analysis With Altair OptiStruct EbookDocument159 pagesLearn Dynamic Analysis With Altair OptiStruct Ebookk krishna chaitanyaNo ratings yet
- DELTA CP AC-evo Inglese Compatto Pinza A BeccoDocument43 pagesDELTA CP AC-evo Inglese Compatto Pinza A BeccolechepinitoNo ratings yet
- Flygt 3127Document80 pagesFlygt 3127Marabun TaNo ratings yet
- Complete ManualDocument59 pagesComplete ManualkusumaNo ratings yet
- 301tech SpecDocument64 pages301tech SpecMASAGUS MANGKU GAMANo ratings yet
- Mek-7300 OmDocument100 pagesMek-7300 OmVăn Thành TiếnNo ratings yet
- Mek-7300 OmDocument421 pagesMek-7300 OmVăn Thành TiếnNo ratings yet
- T M L R: Heory of Achines AB EportDocument31 pagesT M L R: Heory of Achines AB EportAhmad AnsariNo ratings yet
- Axial Piston Pump Variable Displacement Bosch Rexroth A10VSO 1420834640Document56 pagesAxial Piston Pump Variable Displacement Bosch Rexroth A10VSO 1420834640adi purnama100% (3)
- 117 Norwegian Oil and Gas Recommended Guidelines Well Integrity - Rev 6 PDFDocument58 pages117 Norwegian Oil and Gas Recommended Guidelines Well Integrity - Rev 6 PDFRubEn Angelo IIINo ratings yet
- Graduation Project PV English VersionDocument56 pagesGraduation Project PV English VersionabidineNo ratings yet
- SC TutorDocument199 pagesSC TutorPanos GeorgiouNo ratings yet
- SEW Eurodrive K Series Gearmotor Catalog PDFDocument744 pagesSEW Eurodrive K Series Gearmotor Catalog PDFLoxodonta EcNo ratings yet
- S02-035 - Post-Tension Slabs Analysis, Design & Construction - USDocument43 pagesS02-035 - Post-Tension Slabs Analysis, Design & Construction - USQasim FarazNo ratings yet
- Tool Box On Intersection Safety & Design PDFDocument172 pagesTool Box On Intersection Safety & Design PDFupsarki7547No ratings yet
- Fixed Axial Piston Motor Bosch Rexroth A2FE 1422357561 PDFDocument48 pagesFixed Axial Piston Motor Bosch Rexroth A2FE 1422357561 PDFSIDNEINo ratings yet
- Mispa I2 User ManualDocument43 pagesMispa I2 User ManualJosef GrapesNo ratings yet
- Open Sim Users Guide 04042012Document258 pagesOpen Sim Users Guide 04042012manishpaliNo ratings yet
- Ebook DTC-FW-PMSMDocument147 pagesEbook DTC-FW-PMSMMinh PhamNo ratings yet
- Sam61us Manual PDFDocument158 pagesSam61us Manual PDFByron UchupantaNo ratings yet
- Human Factors in Air Transport Understanding Behavior and PerformanceDocument206 pagesHuman Factors in Air Transport Understanding Behavior and PerformanceKouda Hamza100% (2)
- Thermo Lab ReportsDocument80 pagesThermo Lab ReportsKhuram JavedNo ratings yet
- Axial Piston Fixed Motor A4Fm: Replaces: - . - English Series 1 and 3Document48 pagesAxial Piston Fixed Motor A4Fm: Replaces: - . - English Series 1 and 3Anonymous bVi38aVNo ratings yet
- Security Camera Services CompanyDocument54 pagesSecurity Camera Services CompanyScribdTranslationsNo ratings yet
- Solar Thermal Energy Generation: University of Central FloridaDocument148 pagesSolar Thermal Energy Generation: University of Central FloridaEd Gar YundaNo ratings yet
- Parts List 950-960-985-995-988-998 PDFDocument108 pagesParts List 950-960-985-995-988-998 PDFkais rguiguiNo ratings yet
- 858 Professional Sample Processor 88588002ENDocument59 pages858 Professional Sample Processor 88588002ENFabio MolinaNo ratings yet
- Reabilitare Dupa AvcDocument91 pagesReabilitare Dupa AvcDiana StancaNo ratings yet
- Internship DewanDocument19 pagesInternship DewanMuhammad AftabNo ratings yet
- 0614 904173J Mek7300k OmDocument424 pages0614 904173J Mek7300k OmMbonimana GasanaNo ratings yet
- A2fm, TTSDocument52 pagesA2fm, TTSrameshNo ratings yet
- Syncscan User ManualDocument242 pagesSyncscan User ManualWoodrow FoxNo ratings yet
- 3.0 en-US 2021-07 IOM.8105.StdDocument64 pages3.0 en-US 2021-07 IOM.8105.StdNando MinchanNo ratings yet
- Neu 336873Document124 pagesNeu 336873znabuNo ratings yet
- Mini Project 1 Report E1Document51 pagesMini Project 1 Report E1George NabilNo ratings yet
- Project ThesisDocument124 pagesProject ThesisAnand YadavNo ratings yet
- Manual de Usuario Analizador Hematológico Speanrect Spincell 3 (Inglés) - PDF - Red Blood Cell - NatureDocument72 pagesManual de Usuario Analizador Hematológico Speanrect Spincell 3 (Inglés) - PDF - Red Blood Cell - NatureAdib MelliNo ratings yet
- Smart PSS User's Manual V1.0.0Document87 pagesSmart PSS User's Manual V1.0.0Darren RisleyNo ratings yet
- Pessary Guidelines-DikonversiDocument86 pagesPessary Guidelines-DikonversiHerman FiraNo ratings yet
- Business FundamentalsDocument329 pagesBusiness FundamentalsMohd Anas100% (1)
- (Commercial Vehicle Technology) Michael Hilgers - Chassis and Axles (2023, Springer Vieweg) - Libgen - LiDocument76 pages(Commercial Vehicle Technology) Michael Hilgers - Chassis and Axles (2023, Springer Vieweg) - Libgen - Liyoussef.hilali89yhNo ratings yet
- Body RepairsDocument285 pagesBody RepairsIancu GabrielNo ratings yet
- Fulltext01 PDFDocument122 pagesFulltext01 PDFZankar R ParikhNo ratings yet
- Axial Piston Fixed Pump A2Fo: Replaces: - . - English Series 6Document52 pagesAxial Piston Fixed Pump A2Fo: Replaces: - . - English Series 6Hiếu HuỳnhNo ratings yet
- Re-Cording Lives: Governing Asylum in Switzerland and the Need to ResolveFrom EverandRe-Cording Lives: Governing Asylum in Switzerland and the Need to ResolveNo ratings yet
- Felt Compulsion Manual 27.5 V1Document15 pagesFelt Compulsion Manual 27.5 V1Diogo SilvaNo ratings yet
- Prototrak & Trak CNC: Service and Troubleshooting ManualDocument85 pagesPrototrak & Trak CNC: Service and Troubleshooting ManualDavid LucioNo ratings yet
- Compressor - Version 2 - From 04.2013 - 20230125 - 141828Document8 pagesCompressor - Version 2 - From 04.2013 - 20230125 - 141828Mosleh AbdelkaderNo ratings yet
- Armado Sensor Direccion Puma 200Document72 pagesArmado Sensor Direccion Puma 200Daniel SaavedraNo ratings yet
- 04c MS45 DME Part 4Document10 pages04c MS45 DME Part 4CristianNo ratings yet
- Hydromatic Brake CatalogDocument36 pagesHydromatic Brake CatalogMartinez Mauricio Martinez GomezNo ratings yet
- Advantages: Standard Metric SizesDocument6 pagesAdvantages: Standard Metric SizesHassen LazharNo ratings yet
- Parts Manual Grove RT-500DXLDocument915 pagesParts Manual Grove RT-500DXLVictor FabrisNo ratings yet
- John Deere 893 Corn Head Parts CatalogDocument10 pagesJohn Deere 893 Corn Head Parts Catalogtimothy100% (64)
- (英文)4 5吨内燃平衡重式叉车使用说明书内页Document78 pages(英文)4 5吨内燃平衡重式叉车使用说明书内页tonoh4678No ratings yet
- KISSsoft Product BrochureDocument24 pagesKISSsoft Product BrochureShyam PrasadNo ratings yet
- 3911 Limestone Drive RPM Machinery LLC Fort Wayne, Indiana 46809 800-552-0875Document6 pages3911 Limestone Drive RPM Machinery LLC Fort Wayne, Indiana 46809 800-552-0875Cornel BlogsNo ratings yet
- Pop Blind Nut SystemsDocument32 pagesPop Blind Nut SystemsLuis Fernando Losoya CedeñoNo ratings yet
- Quotationto OrderDocument15 pagesQuotationto OrderJonathan KaleNo ratings yet
- 1310 3011 01 - XAS 125 - JD - ASLDocument24 pages1310 3011 01 - XAS 125 - JD - ASLmoises100% (1)
- 330part ListDocument168 pages330part ListFoto GrafNo ratings yet
- ATA 72 EngineDocument50 pagesATA 72 EngineAlejandroNo ratings yet
- Cilindro y FuelleDocument2 pagesCilindro y Fuelletalleres villaNo ratings yet
- 1160 Hydraulic Circuit Orientation Linde Advanced - REV02 - 20100709Document41 pages1160 Hydraulic Circuit Orientation Linde Advanced - REV02 - 20100709Nikolay KuznetsovNo ratings yet
- Basic Series - Gear CouplingsDocument13 pagesBasic Series - Gear CouplingsfrarainsNo ratings yet
- Cxt-25 Parts List: Key No Parts No Parts Name Key No Parts No Parts NameDocument1 pageCxt-25 Parts List: Key No Parts No Parts Name Key No Parts No Parts NameGergely Ivánovics0% (1)
- 16x16 Transmission W/creeperDocument2 pages16x16 Transmission W/creeperford62bNo ratings yet
- 2-Meter Vertical Dipole Array DrawingsDocument4 pages2-Meter Vertical Dipole Array DrawingsHendry LuaseNo ratings yet
- Electric Cables & Accessories Pricelist: September 2020Document32 pagesElectric Cables & Accessories Pricelist: September 2020usama zedanNo ratings yet
- Dip B1-6.5 - Fasteners SR 16-12-06Document168 pagesDip B1-6.5 - Fasteners SR 16-12-06Fahad AlDossariNo ratings yet























































































Download as docx, pdf, or txt
You might also like
- Toyota Engine 1grfe 4 0 Repair ManualDocument7 pagesToyota Engine 1grfe 4 0 Repair Manualjames100% (60)
- Flygt 3171 Service and Repair InstructionsDocument104 pagesFlygt 3171 Service and Repair InstructionsKEVIN SANTIAGO COLONNo ratings yet
- Flygt 2660.181: Service and Repair InstructionsDocument72 pagesFlygt 2660.181: Service and Repair InstructionsSandra Yadhit Higuera Archila100% (1)
- Rear-Mounted Range Shift Cylinder Rebuild T300Document20 pagesRear-Mounted Range Shift Cylinder Rebuild T300Hamilton MirandaNo ratings yet
- Startrac PRO Owners ManualDocument60 pagesStartrac PRO Owners ManualSmith Smen100% (1)
- A Study Guide: Released 2nd Edition 09/2018Document159 pagesA Study Guide: Released 2nd Edition 09/2018vinod reddy mNo ratings yet
- Medonic User Manual PDFDocument109 pagesMedonic User Manual PDFDinesh SreedharanNo ratings yet
- Farm DESIGN ManualDocument79 pagesFarm DESIGN Manualনাজমুল হক শাহিনNo ratings yet
- VW Passat B5 42-1 Rear Axle, FFDocument19 pagesVW Passat B5 42-1 Rear Axle, FFJosé Luis Ormeño100% (1)
- Iveco Spare PartsDocument509 pagesIveco Spare Partsjosephvanbac0% (2)
- sp1 de enDocument186 pagessp1 de enseblakrayapNo ratings yet
- Fedec Chap1 Training en Web 2010Document68 pagesFedec Chap1 Training en Web 2010aphexish100% (1)
- VW Passat b7 2011 Body Repair EngDocument381 pagesVW Passat b7 2011 Body Repair EngVictor Olmeda SarabiaNo ratings yet
- Final Baja MQP PaperDocument70 pagesFinal Baja MQP PaperNithinNo ratings yet
- Report of E-GovtDocument34 pagesReport of E-GovtFatima Tul ZahraNo ratings yet
- LTRSPG 2515 LGDocument80 pagesLTRSPG 2515 LGAla JebnounNo ratings yet
- Neurology Model of CareDocument292 pagesNeurology Model of CarejumabarrientosNo ratings yet
- Hantek 100Mhz 2 Channel Digital Storage Oscilloscope - Dso5102PDocument72 pagesHantek 100Mhz 2 Channel Digital Storage Oscilloscope - Dso5102PBranko JurakNo ratings yet
- Four Wheel Steering Mechanism SystemDocument39 pagesFour Wheel Steering Mechanism SystemZameer Ahmed GheewaleNo ratings yet
- Learn Dynamic Analysis With Altair OptiStruct EbookDocument159 pagesLearn Dynamic Analysis With Altair OptiStruct Ebookk krishna chaitanyaNo ratings yet
- DELTA CP AC-evo Inglese Compatto Pinza A BeccoDocument43 pagesDELTA CP AC-evo Inglese Compatto Pinza A BeccolechepinitoNo ratings yet
- Flygt 3127Document80 pagesFlygt 3127Marabun TaNo ratings yet
- Complete ManualDocument59 pagesComplete ManualkusumaNo ratings yet
- 301tech SpecDocument64 pages301tech SpecMASAGUS MANGKU GAMANo ratings yet
- Mek-7300 OmDocument100 pagesMek-7300 OmVăn Thành TiếnNo ratings yet
- Mek-7300 OmDocument421 pagesMek-7300 OmVăn Thành TiếnNo ratings yet
- T M L R: Heory of Achines AB EportDocument31 pagesT M L R: Heory of Achines AB EportAhmad AnsariNo ratings yet
- Axial Piston Pump Variable Displacement Bosch Rexroth A10VSO 1420834640Document56 pagesAxial Piston Pump Variable Displacement Bosch Rexroth A10VSO 1420834640adi purnama100% (3)
- 117 Norwegian Oil and Gas Recommended Guidelines Well Integrity - Rev 6 PDFDocument58 pages117 Norwegian Oil and Gas Recommended Guidelines Well Integrity - Rev 6 PDFRubEn Angelo IIINo ratings yet
- Graduation Project PV English VersionDocument56 pagesGraduation Project PV English VersionabidineNo ratings yet
- SC TutorDocument199 pagesSC TutorPanos GeorgiouNo ratings yet
- SEW Eurodrive K Series Gearmotor Catalog PDFDocument744 pagesSEW Eurodrive K Series Gearmotor Catalog PDFLoxodonta EcNo ratings yet
- S02-035 - Post-Tension Slabs Analysis, Design & Construction - USDocument43 pagesS02-035 - Post-Tension Slabs Analysis, Design & Construction - USQasim FarazNo ratings yet
- Tool Box On Intersection Safety & Design PDFDocument172 pagesTool Box On Intersection Safety & Design PDFupsarki7547No ratings yet
- Fixed Axial Piston Motor Bosch Rexroth A2FE 1422357561 PDFDocument48 pagesFixed Axial Piston Motor Bosch Rexroth A2FE 1422357561 PDFSIDNEINo ratings yet
- Mispa I2 User ManualDocument43 pagesMispa I2 User ManualJosef GrapesNo ratings yet
- Open Sim Users Guide 04042012Document258 pagesOpen Sim Users Guide 04042012manishpaliNo ratings yet
- Ebook DTC-FW-PMSMDocument147 pagesEbook DTC-FW-PMSMMinh PhamNo ratings yet
- Sam61us Manual PDFDocument158 pagesSam61us Manual PDFByron UchupantaNo ratings yet
- Human Factors in Air Transport Understanding Behavior and PerformanceDocument206 pagesHuman Factors in Air Transport Understanding Behavior and PerformanceKouda Hamza100% (2)
- Thermo Lab ReportsDocument80 pagesThermo Lab ReportsKhuram JavedNo ratings yet
- Axial Piston Fixed Motor A4Fm: Replaces: - . - English Series 1 and 3Document48 pagesAxial Piston Fixed Motor A4Fm: Replaces: - . - English Series 1 and 3Anonymous bVi38aVNo ratings yet
- Security Camera Services CompanyDocument54 pagesSecurity Camera Services CompanyScribdTranslationsNo ratings yet
- Solar Thermal Energy Generation: University of Central FloridaDocument148 pagesSolar Thermal Energy Generation: University of Central FloridaEd Gar YundaNo ratings yet
- Parts List 950-960-985-995-988-998 PDFDocument108 pagesParts List 950-960-985-995-988-998 PDFkais rguiguiNo ratings yet
- 858 Professional Sample Processor 88588002ENDocument59 pages858 Professional Sample Processor 88588002ENFabio MolinaNo ratings yet
- Reabilitare Dupa AvcDocument91 pagesReabilitare Dupa AvcDiana StancaNo ratings yet
- Internship DewanDocument19 pagesInternship DewanMuhammad AftabNo ratings yet
- 0614 904173J Mek7300k OmDocument424 pages0614 904173J Mek7300k OmMbonimana GasanaNo ratings yet
- A2fm, TTSDocument52 pagesA2fm, TTSrameshNo ratings yet
- Syncscan User ManualDocument242 pagesSyncscan User ManualWoodrow FoxNo ratings yet
- 3.0 en-US 2021-07 IOM.8105.StdDocument64 pages3.0 en-US 2021-07 IOM.8105.StdNando MinchanNo ratings yet
- Neu 336873Document124 pagesNeu 336873znabuNo ratings yet
- Mini Project 1 Report E1Document51 pagesMini Project 1 Report E1George NabilNo ratings yet
- Project ThesisDocument124 pagesProject ThesisAnand YadavNo ratings yet
- Manual de Usuario Analizador Hematológico Speanrect Spincell 3 (Inglés) - PDF - Red Blood Cell - NatureDocument72 pagesManual de Usuario Analizador Hematológico Speanrect Spincell 3 (Inglés) - PDF - Red Blood Cell - NatureAdib MelliNo ratings yet
- Smart PSS User's Manual V1.0.0Document87 pagesSmart PSS User's Manual V1.0.0Darren RisleyNo ratings yet
- Pessary Guidelines-DikonversiDocument86 pagesPessary Guidelines-DikonversiHerman FiraNo ratings yet
- Business FundamentalsDocument329 pagesBusiness FundamentalsMohd Anas100% (1)
- (Commercial Vehicle Technology) Michael Hilgers - Chassis and Axles (2023, Springer Vieweg) - Libgen - LiDocument76 pages(Commercial Vehicle Technology) Michael Hilgers - Chassis and Axles (2023, Springer Vieweg) - Libgen - Liyoussef.hilali89yhNo ratings yet
- Body RepairsDocument285 pagesBody RepairsIancu GabrielNo ratings yet
- Fulltext01 PDFDocument122 pagesFulltext01 PDFZankar R ParikhNo ratings yet
- Axial Piston Fixed Pump A2Fo: Replaces: - . - English Series 6Document52 pagesAxial Piston Fixed Pump A2Fo: Replaces: - . - English Series 6Hiếu HuỳnhNo ratings yet
- Re-Cording Lives: Governing Asylum in Switzerland and the Need to ResolveFrom EverandRe-Cording Lives: Governing Asylum in Switzerland and the Need to ResolveNo ratings yet
- Felt Compulsion Manual 27.5 V1Document15 pagesFelt Compulsion Manual 27.5 V1Diogo SilvaNo ratings yet
- Prototrak & Trak CNC: Service and Troubleshooting ManualDocument85 pagesPrototrak & Trak CNC: Service and Troubleshooting ManualDavid LucioNo ratings yet
- Compressor - Version 2 - From 04.2013 - 20230125 - 141828Document8 pagesCompressor - Version 2 - From 04.2013 - 20230125 - 141828Mosleh AbdelkaderNo ratings yet
- Armado Sensor Direccion Puma 200Document72 pagesArmado Sensor Direccion Puma 200Daniel SaavedraNo ratings yet
- 04c MS45 DME Part 4Document10 pages04c MS45 DME Part 4CristianNo ratings yet
- Hydromatic Brake CatalogDocument36 pagesHydromatic Brake CatalogMartinez Mauricio Martinez GomezNo ratings yet
- Advantages: Standard Metric SizesDocument6 pagesAdvantages: Standard Metric SizesHassen LazharNo ratings yet
- Parts Manual Grove RT-500DXLDocument915 pagesParts Manual Grove RT-500DXLVictor FabrisNo ratings yet
- John Deere 893 Corn Head Parts CatalogDocument10 pagesJohn Deere 893 Corn Head Parts Catalogtimothy100% (64)
- (英文)4 5吨内燃平衡重式叉车使用说明书内页Document78 pages(英文)4 5吨内燃平衡重式叉车使用说明书内页tonoh4678No ratings yet
- KISSsoft Product BrochureDocument24 pagesKISSsoft Product BrochureShyam PrasadNo ratings yet
- 3911 Limestone Drive RPM Machinery LLC Fort Wayne, Indiana 46809 800-552-0875Document6 pages3911 Limestone Drive RPM Machinery LLC Fort Wayne, Indiana 46809 800-552-0875Cornel BlogsNo ratings yet
- Pop Blind Nut SystemsDocument32 pagesPop Blind Nut SystemsLuis Fernando Losoya CedeñoNo ratings yet
- Quotationto OrderDocument15 pagesQuotationto OrderJonathan KaleNo ratings yet
- 1310 3011 01 - XAS 125 - JD - ASLDocument24 pages1310 3011 01 - XAS 125 - JD - ASLmoises100% (1)
- 330part ListDocument168 pages330part ListFoto GrafNo ratings yet
- ATA 72 EngineDocument50 pagesATA 72 EngineAlejandroNo ratings yet
- Cilindro y FuelleDocument2 pagesCilindro y Fuelletalleres villaNo ratings yet
- 1160 Hydraulic Circuit Orientation Linde Advanced - REV02 - 20100709Document41 pages1160 Hydraulic Circuit Orientation Linde Advanced - REV02 - 20100709Nikolay KuznetsovNo ratings yet
- Basic Series - Gear CouplingsDocument13 pagesBasic Series - Gear CouplingsfrarainsNo ratings yet
- Cxt-25 Parts List: Key No Parts No Parts Name Key No Parts No Parts NameDocument1 pageCxt-25 Parts List: Key No Parts No Parts Name Key No Parts No Parts NameGergely Ivánovics0% (1)
- 16x16 Transmission W/creeperDocument2 pages16x16 Transmission W/creeperford62bNo ratings yet
- 2-Meter Vertical Dipole Array DrawingsDocument4 pages2-Meter Vertical Dipole Array DrawingsHendry LuaseNo ratings yet
- Electric Cables & Accessories Pricelist: September 2020Document32 pagesElectric Cables & Accessories Pricelist: September 2020usama zedanNo ratings yet
- Dip B1-6.5 - Fasteners SR 16-12-06Document168 pagesDip B1-6.5 - Fasteners SR 16-12-06Fahad AlDossariNo ratings yet