Download as pdf or txt
You might also like
- Etl With Azure Cookbook Practical Recipes For Building Modern Etl Solutions To Load and Transform Data From Any Source 1800203314 9781800203310Document446 pagesEtl With Azure Cookbook Practical Recipes For Building Modern Etl Solutions To Load and Transform Data From Any Source 1800203314 9781800203310krishnak02100% (3)
- 1347-4065 52 4spublishedDocument8 pages1347-4065 52 4spublishedAmanda Gabriela Barrios ReyesNo ratings yet
- A Machine Hearing System For Robust Cough Detection Based On A High-Level Representation of Band-Specific Audio FeaturesDocument12 pagesA Machine Hearing System For Robust Cough Detection Based On A High-Level Representation of Band-Specific Audio FeatureshiimamanenuNo ratings yet
- Estimation of Respiratory Rate Through Breathing AudioDocument12 pagesEstimation of Respiratory Rate Through Breathing AudioIJRASETPublicationsNo ratings yet
- RESPIRE: A Spectral Kurtosis-Based Method To Extract Respiration Rate From Wearable PPG SignalsDocument6 pagesRESPIRE: A Spectral Kurtosis-Based Method To Extract Respiration Rate From Wearable PPG SignalsMariana Córdoba HolguínNo ratings yet
- Feature Extraction For Machine Learning Based Crackle Detection in Lung Sounds From A Health SurveyDocument15 pagesFeature Extraction For Machine Learning Based Crackle Detection in Lung Sounds From A Health SurveyJoshua MacaldoNo ratings yet
- Smart Office Chair For Working Conditions Optimization-1Document13 pagesSmart Office Chair For Working Conditions Optimization-14ra20cs023No ratings yet
- 02.2.16 - Cama de FBGs FBG-based Smart Bed System For HealthcarDocument6 pages02.2.16 - Cama de FBGs FBG-based Smart Bed System For HealthcarRenan Costa LazaroNo ratings yet
- Advanced Patient or Elder Fall Detection Based On Movement and Sound DataDocument5 pagesAdvanced Patient or Elder Fall Detection Based On Movement and Sound DataHitesh ವಿಟ್ಟಲ್ ShettyNo ratings yet
- Respiration Rate and Volume Measurements Using WearableDocument9 pagesRespiration Rate and Volume Measurements Using WearableLevente BalázsNo ratings yet
- IMWUT21 Listen2CoughDocument22 pagesIMWUT21 Listen2CoughRudra Shankha NandyNo ratings yet
- ICTTSE 2022 ETC FINAL PAPER REVIEV 1 Harsh DaharwalDocument3 pagesICTTSE 2022 ETC FINAL PAPER REVIEV 1 Harsh DaharwalHarsh DaharwalNo ratings yet
- Chapter 2Document7 pagesChapter 2anamsuhail1432No ratings yet
- BioPhone Physiology Monitoring From Peripheral Smartphone MotionsDocument4 pagesBioPhone Physiology Monitoring From Peripheral Smartphone Motionsbhuiyan1No ratings yet
- Lumos: An Open-Source Device For Wearable Spectroscopy ResearchDocument24 pagesLumos: An Open-Source Device For Wearable Spectroscopy ResearchSamuele AltrudaNo ratings yet
- Semi-Automated Mid-Turbinate Swab Sampling Using A Six Degrees of Freedom Collaborative Robot and CamerasDocument8 pagesSemi-Automated Mid-Turbinate Swab Sampling Using A Six Degrees of Freedom Collaborative Robot and CamerasIAES International Journal of Robotics and AutomationNo ratings yet
- A Wearable System For Real-Time Continuous Monitoring of Physical ActivityDocument17 pagesA Wearable System For Real-Time Continuous Monitoring of Physical ActivitySDS PRIORNo ratings yet
- Research Article: Design and Development of A Low-Cost, Portable Monitoring Device For Indoor Environment QualityDocument15 pagesResearch Article: Design and Development of A Low-Cost, Portable Monitoring Device For Indoor Environment QualitykentNo ratings yet
- The Open Anesthesiology JournalDocument8 pagesThe Open Anesthesiology JournalMaudonlodNo ratings yet
- Sensors 21 05972 v2Document12 pagesSensors 21 05972 v2PODOSALUD HUANCAYONo ratings yet
- Fog-Enabled Efficient Asthma Monitoring SystemDocument8 pagesFog-Enabled Efficient Asthma Monitoring SystemIJRASETPublicationsNo ratings yet
- Design and Material Optimization VentilatorDocument8 pagesDesign and Material Optimization VentilatorHadhi Hassan KhanNo ratings yet
- Emergency Respiratory SystemDocument9 pagesEmergency Respiratory SystemIJRASETPublicationsNo ratings yet
- Robusthuman 2017Document22 pagesRobusthuman 2017sushanprazNo ratings yet
- IEEE SJ Review - 2015Document11 pagesIEEE SJ Review - 2015Manuela GomezNo ratings yet
- An Intelligent Weather StationDocument18 pagesAn Intelligent Weather Stationadib sallehNo ratings yet
- 2009-01-Personalized Feedback Based On Automatic Activity Recognition From Mixed-Source Raw Sensor DataDocument2 pages2009-01-Personalized Feedback Based On Automatic Activity Recognition From Mixed-Source Raw Sensor DataHarm op den AkkerNo ratings yet
- The Teach'Wear - Healthcare Wearable DeviceDocument6 pagesThe Teach'Wear - Healthcare Wearable Devicedjole07No ratings yet
- Design and Implementation of A Noncontact Sleep Monitoring System Using Infrared Cameras and Motion SensorDocument9 pagesDesign and Implementation of A Noncontact Sleep Monitoring System Using Infrared Cameras and Motion SensorugurAyvazNo ratings yet
- 2020 - On CSI-Based Vital Sign Monitoring Using Commodity WiFiDocument27 pages2020 - On CSI-Based Vital Sign Monitoring Using Commodity WiFisyed hasan alaviNo ratings yet
- Sensors 22 03859Document15 pagesSensors 22 0385954m8mj5qn9No ratings yet
- Micromachines 14 01726Document11 pagesMicromachines 14 01726minhky1426No ratings yet
- Health Monitoring System From Pyralux Copper-Clad Laminate Film and Random Forest AlgorithmDocument2 pagesHealth Monitoring System From Pyralux Copper-Clad Laminate Film and Random Forest Algorithmifpm saidiNo ratings yet
- Impact Factor: 8.423: Volume 12, Issue 4, April 2023Document9 pagesImpact Factor: 8.423: Volume 12, Issue 4, April 2023ted gcgdNo ratings yet
- A Wearable, Wireless Gaze Tracker With Integrated Selection Command Source For Human-Computer InteractionDocument7 pagesA Wearable, Wireless Gaze Tracker With Integrated Selection Command Source For Human-Computer InteractionTarishi GargNo ratings yet
- Applsci 07 00272 v2Document19 pagesApplsci 07 00272 v2rav123No ratings yet
- A P300-Based Quantitative Comparison Bet PDFDocument6 pagesA P300-Based Quantitative Comparison Bet PDFLuís RibeiroNo ratings yet
- Measuring Respiration Rate Based On AndroidDocument6 pagesMeasuring Respiration Rate Based On Androiderik ardiansyahNo ratings yet
- A Wearable Real-Time Human Activity Recognition System Using Biosensors Integrated Into A Knee BandageDocument9 pagesA Wearable Real-Time Human Activity Recognition System Using Biosensors Integrated Into A Knee BandageJorge JiménezNo ratings yet
- Monitoring Respiratory Rate Via AndroidDocument7 pagesMonitoring Respiratory Rate Via Androidmochamad aldi bahij farobyNo ratings yet
- Nhận diện té ngãDocument5 pagesNhận diện té ngãtranlinh27082001No ratings yet
- Opnea Sleep DetectionDocument12 pagesOpnea Sleep DetectionLohith MNo ratings yet
- Croptor - The Crop ProtectorDocument7 pagesCroptor - The Crop ProtectorIJRASETPublicationsNo ratings yet
- Rev A - RespiratoryDocument10 pagesRev A - Respiratorymuhammad irsyad khresna ajiNo ratings yet
- Auracle: Detecting Eating Episodes With An Ear-Mounted SensorDocument27 pagesAuracle: Detecting Eating Episodes With An Ear-Mounted SensorTina SukhijaNo ratings yet
- O.hassan 2020Document5 pagesO.hassan 2020Yasrub SiddiquiNo ratings yet
- Design of A Wearable System For Interactive Caption and Posture Recognition Using Wireless Sensor NetworksDocument6 pagesDesign of A Wearable System For Interactive Caption and Posture Recognition Using Wireless Sensor NetworksseventhsensegroupNo ratings yet
- Recognizing User Context Using MobileDocument5 pagesRecognizing User Context Using MobileAshwin Kishor BangarNo ratings yet
- Combinepdf 7Document27 pagesCombinepdf 7anamsuhail1432No ratings yet
- Contactless Vital Sign Monitoring System For Heart and Respiratory Rate Measurements With Motion Compen (4487)Document21 pagesContactless Vital Sign Monitoring System For Heart and Respiratory Rate Measurements With Motion Compen (4487)Dania DoNo ratings yet
- Iot Based Smart Inhaler For Context-Aware Service ProvisioningDocument7 pagesIot Based Smart Inhaler For Context-Aware Service ProvisioningBAUTISTA DIPAOLANo ratings yet
- Final Complete VersionDocument17 pagesFinal Complete Versionviệt hưng trầnNo ratings yet
- Development of A Wearable Tele-Monitoring SystemDocument2 pagesDevelopment of A Wearable Tele-Monitoring SystemgopinathNo ratings yet
- A Comparison of Feature Extraction Methods For The Classification of Dynamic Activities From Accelerometer DataDocument10 pagesA Comparison of Feature Extraction Methods For The Classification of Dynamic Activities From Accelerometer DataВладимир АрефинNo ratings yet
- Adaptive and Robust Active Vibration ControlDocument405 pagesAdaptive and Robust Active Vibration ControlThành ViếtNo ratings yet
- Machines 09 00045 v2Document16 pagesMachines 09 00045 v2planhigion06No ratings yet
- Sensors: Intelligent Predictor of Energy Expenditure With The Use of Patch-Type Sensor ModuleDocument16 pagesSensors: Intelligent Predictor of Energy Expenditure With The Use of Patch-Type Sensor ModulePeter69No ratings yet
- Smartphone-Based Analysis of Biochemical Tests For Health Monitoring Support at HomeDocument6 pagesSmartphone-Based Analysis of Biochemical Tests For Health Monitoring Support at Homeخير الحفظNo ratings yet
- Ashish Report FileDocument34 pagesAshish Report FileRohit Rana100% (1)
- Human Body Respiration Measurement Using Digital Temperature Sensor With I2c InterfaceDocument8 pagesHuman Body Respiration Measurement Using Digital Temperature Sensor With I2c Interfaceijsrp_orgNo ratings yet
- Augmented Reality Assisted Surgery: Enhancing Surgical Precision through Computer VisionFrom EverandAugmented Reality Assisted Surgery: Enhancing Surgical Precision through Computer VisionNo ratings yet
- Entity Scoping in GRCDocument12 pagesEntity Scoping in GRCArpit ModiNo ratings yet
- Math Works Web in Ar Power Train Full VehiclesDocument46 pagesMath Works Web in Ar Power Train Full VehiclesAtharva Joshi.No ratings yet
- HB 8 - Using HeavyBid in Building ConstructionDocument23 pagesHB 8 - Using HeavyBid in Building ConstructionhaneNo ratings yet
- Modems Cdm-625-En Advanced Satellite Modem With Doubletalk Carrier-In-CarrierDocument5 pagesModems Cdm-625-En Advanced Satellite Modem With Doubletalk Carrier-In-CarrierarzeszutNo ratings yet
- BUCK - What Is CyberspaceDocument3 pagesBUCK - What Is CyberspaceAtikah Adila Bt AzizNo ratings yet
- E Commerce (Final Year Presentation)Document11 pagesE Commerce (Final Year Presentation)Anitha DsouzaNo ratings yet
- AE EligibleDocument1,790 pagesAE EligibleMahendra KurreyNo ratings yet
- Afton Industrial Overview Booklet 2019Document11 pagesAfton Industrial Overview Booklet 2019Clairin LohNo ratings yet
- FYP-2 Form III - LogDocument3 pagesFYP-2 Form III - LogHussain MuslimNo ratings yet
- Imagerunner Advance 8205Document264 pagesImagerunner Advance 8205Gerardo SaucedaNo ratings yet
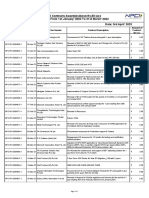
- All Contract Awarded Above 50 Lacs 01012023 31032023Document2 pagesAll Contract Awarded Above 50 Lacs 01012023 31032023Apurva ModyNo ratings yet
- Angular Material Data Table - A Complete ExampleDocument45 pagesAngular Material Data Table - A Complete ExampleOULED SAHELNo ratings yet
- BVMS 10.0 CC Events and AlarmsDocument64 pagesBVMS 10.0 CC Events and AlarmsAnugrah PebrianNo ratings yet
- Volvo Penta D13B-C MP (IPS)Document132 pagesVolvo Penta D13B-C MP (IPS)Alexander GrandaNo ratings yet
- PDF Studio 2019 User GuideDocument621 pagesPDF Studio 2019 User GuideQoppa SoftwareNo ratings yet
- BD Bruker MBT - SN040 - LIMS IntegrationDocument27 pagesBD Bruker MBT - SN040 - LIMS IntegrationnikolozNo ratings yet
- Detection of Hyperpartisan News Articles - 2022 - International Journal of InfoDocument10 pagesDetection of Hyperpartisan News Articles - 2022 - International Journal of Infoᕮᖇᓰᔕ ᕮᙀᗩNo ratings yet
- CATALOGUE IPTV - ALKAD-SpainDocument16 pagesCATALOGUE IPTV - ALKAD-SpainPrasad RaoNo ratings yet
- Anatomy of Core Network Elements Josef UngermanDocument52 pagesAnatomy of Core Network Elements Josef UngermanMaxim PicconiNo ratings yet
- Top Cybersecurity Whitepapers 2020Document44 pagesTop Cybersecurity Whitepapers 2020montejo7783No ratings yet
- PI DataLink - User - GuideDocument189 pagesPI DataLink - User - GuideJeromeNo ratings yet
- KSKV Teknologi Elektrik Sem1 Hingga Sem4Document155 pagesKSKV Teknologi Elektrik Sem1 Hingga Sem4Muhd Muhd HasifNo ratings yet
- Scrathch CardDocument28 pagesScrathch CardMadhu PreethiNo ratings yet
- Chapter 5 NetworkDocument77 pagesChapter 5 NetworkMr. Jack 1106No ratings yet
- 23-11-2023 - SoW - Engineering For Fire Hydrant Solar PV PlantDocument11 pages23-11-2023 - SoW - Engineering For Fire Hydrant Solar PV PlantAl Wahdani RambeNo ratings yet
- SF-VIK003-S-WIP - Video Intercom Indoor Station - Configuration Guide - V2.1.10Document44 pagesSF-VIK003-S-WIP - Video Intercom Indoor Station - Configuration Guide - V2.1.10Antonio RitoNo ratings yet
- Chapter 1: Business Intelligence and AnalyticDocument41 pagesChapter 1: Business Intelligence and AnalyticNurul Shakirah67% (3)
- X7-2 Datasheet Oracle Servers PDFDocument6 pagesX7-2 Datasheet Oracle Servers PDFHope HimuyandiNo ratings yet
- Exchange Hybrid Deployment and Office 365 MigrationDocument25 pagesExchange Hybrid Deployment and Office 365 Migrationtest100% (1)