Download as pdf or txt
You might also like
- 2 - Liberty Karaoke - All Songs by ArtistDocument78 pages2 - Liberty Karaoke - All Songs by ArtistAlanFowlerNo ratings yet
- Math5 COT - Reading and Measuring Temperature Using ThermometerDocument4 pagesMath5 COT - Reading and Measuring Temperature Using ThermometerGlenda Manalo Coching100% (5)
- Backbone Model For Confined Masonry Walls For Performance Based Seismic DesignDocument151 pagesBackbone Model For Confined Masonry Walls For Performance Based Seismic DesignKarishma NazimiNo ratings yet
- Evaluation of Concrete Constitutive Models For Impact SimulationsDocument116 pagesEvaluation of Concrete Constitutive Models For Impact SimulationsbbbbNo ratings yet
- Good Stress-Per Atom IdeaDocument73 pagesGood Stress-Per Atom IdeaiJordanScribdNo ratings yet
- File 1Document70 pagesFile 1kamelNo ratings yet
- Cliff Butcher Thesis - A Multi-Scale Damage Percolation Model of Ductile FractureDocument269 pagesCliff Butcher Thesis - A Multi-Scale Damage Percolation Model of Ductile FractureLyndsey ButcherNo ratings yet
- Grinding of Cement Clinkers: Linking Multi-Scale Fracture Properties To System Chemistry, Mineralogy and MicrostructureDocument172 pagesGrinding of Cement Clinkers: Linking Multi-Scale Fracture Properties To System Chemistry, Mineralogy and MicrostructurechandantuNo ratings yet
- Tork Ladani, Fahimeh - Final PHD ThesisDocument232 pagesTork Ladani, Fahimeh - Final PHD ThesiseduardoNo ratings yet
- 1 s2.0 S0079642517300701 MainDocument103 pages1 s2.0 S0079642517300701 Mainsujithsv88No ratings yet
- Imperial College of Science, Technology and Medicine: Structural Dynamic Modification Using Experimental DataDocument296 pagesImperial College of Science, Technology and Medicine: Structural Dynamic Modification Using Experimental DataAlejandro ValenzuelaNo ratings yet
- PHD Thesis Yang LU Refer For TopicDocument223 pagesPHD Thesis Yang LU Refer For TopicHimanshu SauravNo ratings yet
- Progress in Materials Science: Piyas Chowdhury, Huseyin SehitogluDocument40 pagesProgress in Materials Science: Piyas Chowdhury, Huseyin SehitogluNawaf JanahiNo ratings yet
- Vibration Analysis of Cracked Composite PDFDocument183 pagesVibration Analysis of Cracked Composite PDFFawad MazharNo ratings yet
- Eth 41572 02Document150 pagesEth 41572 02Andrea BergaminiNo ratings yet
- Meyer Nicholas ThesisDocument207 pagesMeyer Nicholas ThesisDaniel CoelhoNo ratings yet
- Thesis Report Studentno.4519566Document102 pagesThesis Report Studentno.4519566Lucas MarquesNo ratings yet
- Jiang 2017Document49 pagesJiang 2017Agtc TandayNo ratings yet
- High Velocity Impact Fracture: Xiaoqing TengDocument330 pagesHigh Velocity Impact Fracture: Xiaoqing TengMARTIN ALEJANDRO MORACHO GARCIANo ratings yet
- Akron1272647385 PDFDocument129 pagesAkron1272647385 PDFVictor Daniel WaasNo ratings yet
- Cogging Torque, Torque Ripple and Radial Force Analysis of PMSMDocument200 pagesCogging Torque, Torque Ripple and Radial Force Analysis of PMSMraminasehNo ratings yet
- Nonlinear Finite Element Analysis of Concrete Columns Subjected T PDFDocument141 pagesNonlinear Finite Element Analysis of Concrete Columns Subjected T PDFSafi Ur RehmanNo ratings yet
- ApoyoDocument155 pagesApoyoCristian Arturo Duran SilvaNo ratings yet
- Lecture - Notes - Understanding Fundamentals PDFDocument134 pagesLecture - Notes - Understanding Fundamentals PDFjosejNo ratings yet
- Tablas TrasformadasDocument98 pagesTablas TrasformadasMaría José EcheverríaNo ratings yet
- qt7v88h453 NosplashDocument219 pagesqt7v88h453 Nosplashjohnstruct archNo ratings yet
- Probabilistic Models of Damage and Repair Cost For Reinforced Concrete Structural MembersDocument125 pagesProbabilistic Models of Damage and Repair Cost For Reinforced Concrete Structural MembersjifotNo ratings yet
- Fulltext PDFDocument125 pagesFulltext PDFGidion TurualloNo ratings yet
- FULLTEXT02Document48 pagesFULLTEXT02sonulbijuNo ratings yet
- Experimental Techniques For Shear Testing of Thin Sheet Metals and Compression Testing at Intermediate Strain RatesDocument133 pagesExperimental Techniques For Shear Testing of Thin Sheet Metals and Compression Testing at Intermediate Strain RatesDhivyan JagadeesanNo ratings yet
- Huopana MastersThesisDocument89 pagesHuopana MastersThesisBHARANINo ratings yet
- Journal Pre-Proof: Journal of Materials Research and TechnologyDocument55 pagesJournal Pre-Proof: Journal of Materials Research and TechnologyAhmed ismailNo ratings yet
- GFRP+Two WaySlab ThesisDocument175 pagesGFRP+Two WaySlab ThesisKrishnaa SubramanianNo ratings yet
- Analysis of Adhesive Anchorage Systems Under Extreme in Service TDocument137 pagesAnalysis of Adhesive Anchorage Systems Under Extreme in Service TAce De GuzmanNo ratings yet
- ВЕС ОБЗОРНАЯ СТАТЬЯDocument93 pagesВЕС ОБЗОРНАЯ СТАТЬЯsalo otdaiNo ratings yet
- 4th (El-Mogy Mostafa PDFDocument282 pages4th (El-Mogy Mostafa PDFGamtesa E WakeneNo ratings yet
- Imp-Thoupal 2009-Mechanics of Mechanically Fastened Joints in Polymer-Matrix Composite Structures - A Review PDFDocument29 pagesImp-Thoupal 2009-Mechanics of Mechanically Fastened Joints in Polymer-Matrix Composite Structures - A Review PDFJamalDilferozNo ratings yet
- TR172 FellDocument279 pagesTR172 FellAmey GudigarNo ratings yet
- 2ms8 Tensile TestDocument77 pages2ms8 Tensile TestluayNo ratings yet
- Ubc 2013 Fall Shahnewaz MD PDFDocument139 pagesUbc 2013 Fall Shahnewaz MD PDFConan EdogawaNo ratings yet
- Parametric Study of The Bond Between Fiber Reinforced PolymersDocument102 pagesParametric Study of The Bond Between Fiber Reinforced PolymersLemuria TntNo ratings yet
- Analysis and Comparison of Connections in Steel Structures PDFDocument55 pagesAnalysis and Comparison of Connections in Steel Structures PDFĐình Tuấn NguyễnNo ratings yet
- WebPEER 2015 12 KolozvariDocument143 pagesWebPEER 2015 12 KolozvariRory Cristian Cordero RojoNo ratings yet
- IndexDocument88 pagesIndexErnest FrrokuNo ratings yet
- Simulation of Electromagnetic Fields in Double Negative MetamaterialsDocument131 pagesSimulation of Electromagnetic Fields in Double Negative Metamaterialshmalrizzo469No ratings yet
- Title PDFDocument164 pagesTitle PDFdefrNo ratings yet
- Study On The Semiconducting PropertiesDocument155 pagesStudy On The Semiconducting Propertiespadidela swarochishraoNo ratings yet
- Performance of Full-Scale Reinforced Concrete Columns Subjected To Extreme Earthquake LoadingDocument236 pagesPerformance of Full-Scale Reinforced Concrete Columns Subjected To Extreme Earthquake LoadingAniket GohilNo ratings yet
- Quality Assessment of Dynamic Soil-Structure Interaction Models Using Energy MeasuresDocument132 pagesQuality Assessment of Dynamic Soil-Structure Interaction Models Using Energy MeasuresAyanShrivastavaNo ratings yet
- Analise Micro Da Anatonia Do BambuDocument42 pagesAnalise Micro Da Anatonia Do Bambuluanna.material.mestradoNo ratings yet
- Thesis EliseCamilleChevallier Welding Plastic Strain PDFDocument211 pagesThesis EliseCamilleChevallier Welding Plastic Strain PDFHui DaiNo ratings yet
- Development of Material Model Subroutines For Linear and Nonlinea PDFDocument83 pagesDevelopment of Material Model Subroutines For Linear and Nonlinea PDFPablo Peña TorresNo ratings yet
- Hybrid Paper 2Document222 pagesHybrid Paper 2prabindp100% (1)
- Materials Science and Engineering C: ReviewDocument16 pagesMaterials Science and Engineering C: ReviewBeesam Ramesh KumarNo ratings yet
- XFEM Based Partly Cracked Interface Model For Reinforced Concrete AnalysisDocument159 pagesXFEM Based Partly Cracked Interface Model For Reinforced Concrete AnalysisIason IakovidisNo ratings yet
- Zigeng Wang ThesisDocument294 pagesZigeng Wang Thesisaparnanoojilla1729No ratings yet
- Paradise Asu 0010E 22382Document204 pagesParadise Asu 0010E 22382stoica2romic2No ratings yet
- Mohan P Shell DissertationDocument164 pagesMohan P Shell Dissertationsuvabrata_das010% (1)
- Conceptual Design of Nuclear-Geothermal Energy Storage Systems For Variable Electricity ProductionDocument184 pagesConceptual Design of Nuclear-Geothermal Energy Storage Systems For Variable Electricity Productionoxe70970No ratings yet
- Numerical and Experimental Investigations On The Stress Distribution of Bolted Glass Connection Under In-Plane LoadsDocument193 pagesNumerical and Experimental Investigations On The Stress Distribution of Bolted Glass Connection Under In-Plane Loadskimhongheng889No ratings yet
- Modeling and Application ofDocument210 pagesModeling and Application ofyq zhangNo ratings yet
- Time-dependent Behaviour and Design of Composite Steel-concrete StructuresFrom EverandTime-dependent Behaviour and Design of Composite Steel-concrete StructuresNo ratings yet
- DVA Quasi-ZeroDocument24 pagesDVA Quasi-ZeroSalvador Chairez GarciaNo ratings yet
- Dynamic Absorber With A Soft Magnetorheological Elastomer For Powetrain Vibration SuppressionDocument15 pagesDynamic Absorber With A Soft Magnetorheological Elastomer For Powetrain Vibration SuppressionSalvador Chairez GarciaNo ratings yet
- A Semi-Active Flutter Control Scheme For A Two-Dimensional WingDocument7 pagesA Semi-Active Flutter Control Scheme For A Two-Dimensional WingSalvador Chairez GarciaNo ratings yet
- Experimental Investigation On Vibration Characteristics of Sandwich BeamsDocument5 pagesExperimental Investigation On Vibration Characteristics of Sandwich BeamsSalvador Chairez GarciaNo ratings yet
- Vibration Isolating Material With Internal Structural Providing Quasi-Zero StiffnesssDocument7 pagesVibration Isolating Material With Internal Structural Providing Quasi-Zero StiffnesssSalvador Chairez GarciaNo ratings yet
- Semi-Active Flutter Control of A High-Aspect-Ratio Wing Using MultipleDocument12 pagesSemi-Active Flutter Control of A High-Aspect-Ratio Wing Using MultipleSalvador Chairez GarciaNo ratings yet
- Simi-Active, Flutter Control. AsimetricDocument7 pagesSimi-Active, Flutter Control. AsimetricSalvador Chairez GarciaNo ratings yet
- Broad Learning Robust Semi-Active Structural ControlDocument21 pagesBroad Learning Robust Semi-Active Structural ControlSalvador Chairez GarciaNo ratings yet
- ModeladoDocument30 pagesModeladoSalvador Chairez GarciaNo ratings yet
- Design of Metastructures With Quasi-Zero Dynamic StiDocument13 pagesDesign of Metastructures With Quasi-Zero Dynamic StiSalvador Chairez GarciaNo ratings yet
- Fractional Rheological Models of Dynamic Mechanical Behavior of Magnetoactive Elastomers in Magnetic FieldsDocument14 pagesFractional Rheological Models of Dynamic Mechanical Behavior of Magnetoactive Elastomers in Magnetic FieldsSalvador Chairez GarciaNo ratings yet
- Semi-Active Flutter Control Using A Linear Tuned Vibration Absorber of Magnetorheological Elastomers (Mres)Document8 pagesSemi-Active Flutter Control Using A Linear Tuned Vibration Absorber of Magnetorheological Elastomers (Mres)Salvador Chairez GarciaNo ratings yet
- Advances in Structural Vibration Control Application Magneto-Rheological Visco-ElastomerDocument6 pagesAdvances in Structural Vibration Control Application Magneto-Rheological Visco-ElastomerSalvador Chairez GarciaNo ratings yet
- Implementation of An Unloading Compliance ProcedurDocument11 pagesImplementation of An Unloading Compliance ProcedurSalvador Chairez GarciaNo ratings yet
- Wing and Engine Sizing by Using The Matching Plot TechniqueDocument12 pagesWing and Engine Sizing by Using The Matching Plot TechniqueSalvador Chairez GarciaNo ratings yet
- 2903-Article Text-6271-1-10-20180618Document12 pages2903-Article Text-6271-1-10-20180618Salvador Chairez GarciaNo ratings yet
- K-R Curve Determination: Standard Test Method ForDocument16 pagesK-R Curve Determination: Standard Test Method ForSalvador Chairez GarciaNo ratings yet
- Señal TransitorioDocument6 pagesSeñal TransitorioSalvador Chairez GarciaNo ratings yet
- Ayurvedic Literature in Orissa - An Overview: Prem Kishore, M.M. Padhi, G.C. NandaDocument6 pagesAyurvedic Literature in Orissa - An Overview: Prem Kishore, M.M. Padhi, G.C. NandaAngel LucyNo ratings yet
- Pearls of Wisdom - A Study of Legal MaximsDocument5 pagesPearls of Wisdom - A Study of Legal Maximsnidhi_anand_2No ratings yet
- 2021 MATHCOUNTS National Competition Results Answer Booklet 1Document24 pages2021 MATHCOUNTS National Competition Results Answer Booklet 1ChainLinkNo ratings yet
- Intel® Desktop Board DG33BU Product Guide: Order Number: D83426-001Document75 pagesIntel® Desktop Board DG33BU Product Guide: Order Number: D83426-001Kepala BotakNo ratings yet
- Cookie Business PlanDocument27 pagesCookie Business PlanLiza Mhey AcedoNo ratings yet
- Cancer Latest NewsDocument10 pagesCancer Latest NewsREFINERY ENGINEERINGNo ratings yet
- Anb Brochure Fietsroute Klaprozen Heuvelland enDocument4 pagesAnb Brochure Fietsroute Klaprozen Heuvelland enBella BossNo ratings yet
- Flue & Chimney BrochureDocument15 pagesFlue & Chimney BrochureAirtherm Engineering LtdNo ratings yet
- IPru Signature Online Brochure PDFDocument28 pagesIPru Signature Online Brochure PDFAjeet ThakurNo ratings yet
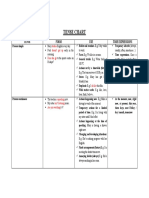
- TENSE CHART (Present Simple Vs Present Continuous)Document1 pageTENSE CHART (Present Simple Vs Present Continuous)Fmga GaNo ratings yet
- Marketing Strategy Adapted by Royal EnfieldDocument41 pagesMarketing Strategy Adapted by Royal EnfieldKriti SinghNo ratings yet
- The Golden Age of Comic Books - Representations of American CulturDocument14 pagesThe Golden Age of Comic Books - Representations of American CulturGasterSparda8No ratings yet
- CH 20 - Program Design and Technique For Aerobic Endurance TrainingDocument20 pagesCH 20 - Program Design and Technique For Aerobic Endurance TrainingMarco RodriguezNo ratings yet
- Chapter 3 - SQL NotesDocument25 pagesChapter 3 - SQL NotesDibyeshNo ratings yet
- Cambridge IGCSE: Information and Communication Technology 0417/03Document8 pagesCambridge IGCSE: Information and Communication Technology 0417/03EffNo ratings yet
- EA and HalachaDocument63 pagesEA and HalachaAvraham EisenbergNo ratings yet
- Dissertation Ideas For Mental Health NursingDocument5 pagesDissertation Ideas For Mental Health NursingPaperWriterUK100% (1)
- Types of Containers PDFDocument17 pagesTypes of Containers PDFJorge Alegre100% (1)
- Energy Efficiency Frameworks A Literature OverviewDocument10 pagesEnergy Efficiency Frameworks A Literature OverviewM VlogNo ratings yet
- Pcol MnemonicsDocument12 pagesPcol MnemonicsJustine Rubillete Mendoza MarianoNo ratings yet
- G.R. No. 162583 CASE DIGESTDocument2 pagesG.R. No. 162583 CASE DIGESTArjay GuillandezNo ratings yet
- PARAM Shavak: High Performance Computing (HPC), Grid and Cloud ComputingDocument3 pagesPARAM Shavak: High Performance Computing (HPC), Grid and Cloud ComputingarchikakatiyarNo ratings yet
- History Conclusions + Important StatsDocument20 pagesHistory Conclusions + Important Statsemma karakaidouNo ratings yet
- ACT180 Module 3Document9 pagesACT180 Module 3Norlaylah Naga LantongNo ratings yet
- November 2023Document1 pageNovember 2023innoozokoNo ratings yet
- Bronze Shams Al-Ma'Arif Jupiter Al-Alim TalismanDocument2 pagesBronze Shams Al-Ma'Arif Jupiter Al-Alim Talismannspectah1No ratings yet
- PetroSync - API 579 Fitness For Service 2023 Oil Gas TrainingDocument5 pagesPetroSync - API 579 Fitness For Service 2023 Oil Gas TrainingPetro SyncNo ratings yet
- Del Rosario-Igtiben V RepublicDocument1 pageDel Rosario-Igtiben V RepublicGel TolentinoNo ratings yet