Download as pdf or txt
You might also like
- GEH-6676E PSS User GuideDocument58 pagesGEH-6676E PSS User GuideLê Trung DũngNo ratings yet
- GEI-100772-EX2100e Excitation Control System IO Interface (ESYS) Module Instruction GuideDocument32 pagesGEI-100772-EX2100e Excitation Control System IO Interface (ESYS) Module Instruction GuideLê Trung DũngNo ratings yet
- Problem StatementDocument9 pagesProblem StatementTauseef Gillani100% (1)
- Inverse Kinematic Analysis of Robot Manipulators PDFDocument336 pagesInverse Kinematic Analysis of Robot Manipulators PDFManuel Caeiro0% (1)
- Energy Conversion and Management: Hongqing Fang, Long Chen, Zuyi ShenDocument8 pagesEnergy Conversion and Management: Hongqing Fang, Long Chen, Zuyi ShenErna UtamiNo ratings yet
- ISA Transactions: Zhihuan Chen, Yanbin Yuan, Xiaohui Yuan, Yuehua Huang, Xianshan Li, Wenwu LiDocument15 pagesISA Transactions: Zhihuan Chen, Yanbin Yuan, Xiaohui Yuan, Yuehua Huang, Xianshan Li, Wenwu LiAshik AhmedNo ratings yet
- Energy Conversion and Management: Zhihuan Chen, Xiaohui Yuan, Hao Tian, Bin JiDocument10 pagesEnergy Conversion and Management: Zhihuan Chen, Xiaohui Yuan, Hao Tian, Bin JiNung NingNo ratings yet
- PHD ACODocument13 pagesPHD ACOPrasadYadavNo ratings yet
- WaterDocument12 pagesWaterMohamed SobhyNo ratings yet
- 90 ThreeDocument10 pages90 ThreeMekonnen ShewaregaNo ratings yet
- GFHFGJDocument8 pagesGFHFGJAlakananda ChoudhuryNo ratings yet
- Multimachine Power System Stabilizers Design Using PSO AlgorithmDocument8 pagesMultimachine Power System Stabilizers Design Using PSO AlgorithmFaiza FofaNo ratings yet
- Project1 Gantry CraneDocument7 pagesProject1 Gantry CranegundemzuhalNo ratings yet
- A Novel Hybrid PSO-PS Optimized Fuzzy PI Controller For AGC SeeDocument14 pagesA Novel Hybrid PSO-PS Optimized Fuzzy PI Controller For AGC SeeMushtaq Najeeb AhmedNo ratings yet
- Review of Developments in Methods of Reconfiguration of Distribution NetworksDocument3 pagesReview of Developments in Methods of Reconfiguration of Distribution NetworksabbasaliNo ratings yet
- My ThesisDocument28 pagesMy ThesisDillip kumar mishraNo ratings yet
- Electrical Power and Energy Systems: M. Elsisi, M. Soliman, M.A.S. Aboelela, W. MansourDocument8 pagesElectrical Power and Energy Systems: M. Elsisi, M. Soliman, M.A.S. Aboelela, W. Mansourmahmoud helalNo ratings yet
- Controller Parameters Tuning of Differential Evolution Algorithm and Its Application To Load Frequency Control of Multi-Source Power SystemDocument9 pagesController Parameters Tuning of Differential Evolution Algorithm and Its Application To Load Frequency Control of Multi-Source Power Systemiraj FarajiNo ratings yet
- Electrical Power and Energy Systems: Banaja Mohanty, Sidhartha Panda, P.K. HotaDocument9 pagesElectrical Power and Energy Systems: Banaja Mohanty, Sidhartha Panda, P.K. HotasunilkumareceNo ratings yet
- Applied Soft Computing: Rabindra Kumar Sahu, Sidhartha Panda, Saroj PadhanDocument18 pagesApplied Soft Computing: Rabindra Kumar Sahu, Sidhartha Panda, Saroj Padhaniraj FarajiNo ratings yet
- Elsevier 2016 PDFDocument12 pagesElsevier 2016 PDFVenkat Reddy KotaNo ratings yet
- 1 en 13 Chapter OnlinePDFDocument41 pages1 en 13 Chapter OnlinePDFRasoul GmdriNo ratings yet
- Cherian 2017 IOP Conf. Ser. - Mater. Sci. Eng. 263 062063Document11 pagesCherian 2017 IOP Conf. Ser. - Mater. Sci. Eng. 263 062063krishnaNo ratings yet
- Developing Chemical Reaction Differential Evolution Method For Optimization of Pss ParametersDocument8 pagesDeveloping Chemical Reaction Differential Evolution Method For Optimization of Pss ParametersmouradNo ratings yet
- Applied SciencesDocument27 pagesApplied SciencesSalNo ratings yet
- Sensors: Machine Learning-Based Sensor Data Modeling Methods For Power Transformer PHMDocument17 pagesSensors: Machine Learning-Based Sensor Data Modeling Methods For Power Transformer PHMTrisna YuliaNo ratings yet
- Switch Placement Algorithm For Reducing Customers Outage Impacts On Radial Distribution NetworksDocument6 pagesSwitch Placement Algorithm For Reducing Customers Outage Impacts On Radial Distribution NetworksSholat DhuhaNo ratings yet
- Improvement in Quality of Power by PI Co PDFDocument5 pagesImprovement in Quality of Power by PI Co PDFAshwani KumarNo ratings yet
- Artificial Intelligence For Solid Oxide Fuel CellsDocument13 pagesArtificial Intelligence For Solid Oxide Fuel Cellsmuhammet zahit bakışNo ratings yet
- Cherian - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 263 - 0620Document11 pagesCherian - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 263 - 0620YOUNES KABBAJNo ratings yet
- Neural Based PH System in Effluent Treatment ProcessDocument11 pagesNeural Based PH System in Effluent Treatment Processmaheswaribalaji2010No ratings yet
- Ijiset V8 I05 51Document15 pagesIjiset V8 I05 51elhadjimbaye.ndiaye91No ratings yet
- Electronics: Optimized Proportional-Integral-Derivative Controller For Upper Limb Rehabilitation RobotDocument26 pagesElectronics: Optimized Proportional-Integral-Derivative Controller For Upper Limb Rehabilitation RobotAdeel ur RehmanNo ratings yet
- MPPT Tech 1Document12 pagesMPPT Tech 122mt0403No ratings yet
- An Echo State Gaussian Process-Based Nonlinear Model Predictive Control For Pneumatic Muscle ActuatorsDocument14 pagesAn Echo State Gaussian Process-Based Nonlinear Model Predictive Control For Pneumatic Muscle ActuatorsSathvik BhatNo ratings yet
- SCARA RobotDocument31 pagesSCARA RobotQuyết Nguyễn CôngNo ratings yet
- Comparative Performance Analysis of Teaching Learning Based Optimization For Automatic Load Frequency Control of Multi-Source Power SystemDocument11 pagesComparative Performance Analysis of Teaching Learning Based Optimization For Automatic Load Frequency Control of Multi-Source Power Systemiraj FarajiNo ratings yet
- Computers and Operations Research: Mehdi Tavakoli, Edris Pouresmaeil, Jafar Adabi, Radu Godina, João P.S. CatalãoDocument11 pagesComputers and Operations Research: Mehdi Tavakoli, Edris Pouresmaeil, Jafar Adabi, Radu Godina, João P.S. CatalãosurabhiNo ratings yet
- Engineering Science and Technology, An International JournalDocument21 pagesEngineering Science and Technology, An International Journalagus satyaNo ratings yet
- Optimal Tuning of PI Controller Using PSO Optimization For Indirect Power Control For DFIG Based Wind Turbine With MPPTDocument11 pagesOptimal Tuning of PI Controller Using PSO Optimization For Indirect Power Control For DFIG Based Wind Turbine With MPPThamza gaNo ratings yet
- Investigation of Ant Colony Optimization Algorithm For Efficient Energy Utilization in Wireless Sensor NetworkDocument20 pagesInvestigation of Ant Colony Optimization Algorithm For Efficient Energy Utilization in Wireless Sensor NetworkAIRCC - IJCNCNo ratings yet
- Investigation of Ant Colony Optimization Algorithm For Efficient Energy Utilization in Wireless Sensor NetworkDocument20 pagesInvestigation of Ant Colony Optimization Algorithm For Efficient Energy Utilization in Wireless Sensor NetworkAIRCC - IJCNCNo ratings yet
- Ijet14 06 03 155Document20 pagesIjet14 06 03 155Asan Mohideen KhansaduraiNo ratings yet
- Advances en Sotware de IngenieriaDocument11 pagesAdvances en Sotware de Ingenieriamiguel angelNo ratings yet
- Research Papers On Electrical Machines PDFDocument11 pagesResearch Papers On Electrical Machines PDFefe6zst5100% (1)
- Intelligent Flow Meter Using Swarm Intelligence Kalaiselvan.GDocument19 pagesIntelligent Flow Meter Using Swarm Intelligence Kalaiselvan.Gsai prashanthi kalaiselvanNo ratings yet
- Modeling Techniques and Stability Analysis Tools For Grid-Connected ConvertersDocument18 pagesModeling Techniques and Stability Analysis Tools For Grid-Connected ConvertersEletricaNo ratings yet
- 001 - 017 (EDocFind - Com)Document16 pages001 - 017 (EDocFind - Com)firatNo ratings yet
- Multi-Machine Power System Stabilizer Design by Using Cultural AlgorithmsDocument10 pagesMulti-Machine Power System Stabilizer Design by Using Cultural AlgorithmsMateo RamirezNo ratings yet
- A Literature Review of Recent Advances in Optimal Power FlowDocument5 pagesA Literature Review of Recent Advances in Optimal Power FlowInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 06 - Chapter1 (1) BFADocument19 pages06 - Chapter1 (1) BFAsanthoshramrNo ratings yet
- Psce ConferenceDocument96 pagesPsce ConferenceSeetharam MahanthiNo ratings yet
- Tran Quang Tho - KDDDocument46 pagesTran Quang Tho - KDDTuấn ĐặngNo ratings yet
- Particle Swarm Optimization Algorithm To Find The Location of Facts Controllers For A Transmission LineDocument2 pagesParticle Swarm Optimization Algorithm To Find The Location of Facts Controllers For A Transmission LineHnin HninNo ratings yet
- 1 RVDocument25 pages1 RVA Naveen KumarNo ratings yet
- Design of A Fast Transient Stability Control Scheme in Power SystemDocument8 pagesDesign of A Fast Transient Stability Control Scheme in Power SystemsunitharajababuNo ratings yet
- Multi-Way Optimal Control of A Benchmark Fed-Batch Fermentation ProcessDocument24 pagesMulti-Way Optimal Control of A Benchmark Fed-Batch Fermentation ProcessVenkata Suryanarayana GorleNo ratings yet
- QUT Digital Repository:: Reliability Driven Reconfiguration of Rural Power Distribution SystemsDocument7 pagesQUT Digital Repository:: Reliability Driven Reconfiguration of Rural Power Distribution SystemsEliNo ratings yet
- Paper para Revision 3Document12 pagesPaper para Revision 3Jhon Jiménez AcevedoNo ratings yet
- 1 s2.0 S1568494618305775 MainDocument16 pages1 s2.0 S1568494618305775 Mainsamundra24No ratings yet
- 1 s2.0 S0378779612000405 Main - 2Document10 pages1 s2.0 S0378779612000405 Main - 2BodoShowNo ratings yet
- PI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM DrivesDocument11 pagesPI Controller Relay Auto-Tuning Using Delay and Phase Margin in PMSM Drivesrizk86No ratings yet
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- SMIBDocument7 pagesSMIBLê Trung DũngNo ratings yet
- Design of Power System Stabilizer Using Fuzzy Based Sliding Mode Control TechniqueDocument16 pagesDesign of Power System Stabilizer Using Fuzzy Based Sliding Mode Control TechniqueLê Trung DũngNo ratings yet
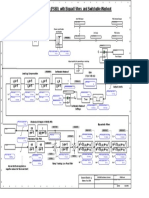
- Pss DiagramDocument1 pagePss DiagramLê Trung DũngNo ratings yet
- Al Hinai2009Document5 pagesAl Hinai2009Lê Trung DũngNo ratings yet
- Jagadeesh 2016Document6 pagesJagadeesh 2016Lê Trung DũngNo ratings yet
- Fereidouni VahidiDocument12 pagesFereidouni VahidiLê Trung DũngNo ratings yet
- Primary Frequency RegulationDocument6 pagesPrimary Frequency RegulationLê Trung DũngNo ratings yet
- Enhancement of Power System Stability Using Fuzzy Logic Based Supervisory Power System Stabilizer (Xem)Document6 pagesEnhancement of Power System Stability Using Fuzzy Logic Based Supervisory Power System Stabilizer (Xem)Lê Trung DũngNo ratings yet
- Parameter Tuning and Experimental Results of Power System StabilizerDocument61 pagesParameter Tuning and Experimental Results of Power System StabilizerLê Trung DũngNo ratings yet
- Tuning of Power System Stabilizer For Small Signal Stability Improvement of Interconnected Power SystemDocument15 pagesTuning of Power System Stabilizer For Small Signal Stability Improvement of Interconnected Power SystemLê Trung DũngNo ratings yet
- Fuzzy Logic Based Power System Stabilizer: August 2008Document3 pagesFuzzy Logic Based Power System Stabilizer: August 2008Lê Trung DũngNo ratings yet
- Feedward Control For Power System StabilizerDocument12 pagesFeedward Control For Power System StabilizerLê Trung DũngNo ratings yet
- GovernorDocument93 pagesGovernorLê Trung DũngNo ratings yet
- Submitted byDocument71 pagesSubmitted byLê Trung DũngNo ratings yet
- Ramya 2011Document5 pagesRamya 2011Lê Trung DũngNo ratings yet
- Tuning of Power System Stabilizer in SingleDocument6 pagesTuning of Power System Stabilizer in SingleLê Trung DũngNo ratings yet
- Effect of Load Increase and Power System StabilizeDocument14 pagesEffect of Load Increase and Power System StabilizeLê Trung DũngNo ratings yet
- GEH-6721 Vol IDocument202 pagesGEH-6721 Vol ILê Trung DũngNo ratings yet
- GEH-6676 - EX2100 and EX2100e Excitation ControlDocument60 pagesGEH-6676 - EX2100 and EX2100e Excitation ControlLê Trung DũngNo ratings yet
- Gholipour 2009Document7 pagesGholipour 2009Lê Trung DũngNo ratings yet
- Analysis and Applicability of Heffron-Phillips ModDocument9 pagesAnalysis and Applicability of Heffron-Phillips ModLê Trung DũngNo ratings yet
- GEI-100509-EX2100 and EX2100e Excitation Control Exciter Attenuation Module (EXAM) Instruction GuideDocument14 pagesGEI-100509-EX2100 and EX2100e Excitation Control Exciter Attenuation Module (EXAM) Instruction GuideLê Trung DũngNo ratings yet
- Effects of The Ramp-Tracking Filter On Overall Compensation of Power System StabilizersDocument6 pagesEffects of The Ramp-Tracking Filter On Overall Compensation of Power System StabilizersLê Trung Dũng0% (1)
- PID Control With Fuzzy Compensation For Hydroelectric Generating Unit - For ThanhDocument5 pagesPID Control With Fuzzy Compensation For Hydroelectric Generating Unit - For ThanhLê Trung DũngNo ratings yet
- A Practical Power System Stabilizer Tuning For GARRI Power StationDocument8 pagesA Practical Power System Stabilizer Tuning For GARRI Power StationLê Trung DũngNo ratings yet
- Adaptive Neuro-Fuzzy Technique For Tuning Power System StabilizerDocument5 pagesAdaptive Neuro-Fuzzy Technique For Tuning Power System StabilizerLê Trung DũngNo ratings yet
- InTechOpen Kalman PostprintDocument19 pagesInTechOpen Kalman PostprintLê Trung DũngNo ratings yet
- GEI-100547-EX2100 and EX2100e ExcitationControl Factory Testsand Demonstrations Instruction GuideDocument12 pagesGEI-100547-EX2100 and EX2100e ExcitationControl Factory Testsand Demonstrations Instruction GuideLê Trung DũngNo ratings yet
- Development of Improved Maximum Power Point Tracking Algorithm Based On Balancing Particle Swarm Optimization For Renewable Energy GenerationDocument17 pagesDevelopment of Improved Maximum Power Point Tracking Algorithm Based On Balancing Particle Swarm Optimization For Renewable Energy GenerationKIU PUBLICATION AND EXTENSIONNo ratings yet
- Sattarvand Niemann DeliusDocument14 pagesSattarvand Niemann DeliusKevin RiosNo ratings yet
- Gradient Based Particle SwarmDocument7 pagesGradient Based Particle SwarmRavi DadsenaNo ratings yet
- Email Spam Classification Using Hybrid Approach of RBF Neural Network and Particle Swarm OptimizationDocument12 pagesEmail Spam Classification Using Hybrid Approach of RBF Neural Network and Particle Swarm OptimizationAIRCC - IJNSANo ratings yet
- Mbe 19 12 660Document39 pagesMbe 19 12 660Shaba ShelNo ratings yet
- Full Chapter Applied Computer Sciences in Engineering 7Th Workshop On Engineering Applications Wea 2020 Bogota Colombia October 7 9 2020 Proceedings Juan Carlos Figueroa Garcia PDFDocument54 pagesFull Chapter Applied Computer Sciences in Engineering 7Th Workshop On Engineering Applications Wea 2020 Bogota Colombia October 7 9 2020 Proceedings Juan Carlos Figueroa Garcia PDFbianca.miller791100% (9)
- Pso 1Document21 pagesPso 1VaijayanthiNo ratings yet
- My KHElsevierDocument16 pagesMy KHElsevierjensi_ramakrishnanNo ratings yet
- 1) Optimal Load Frequency Control Based On Artificial Bee Colony Optimization PDFDocument6 pages1) Optimal Load Frequency Control Based On Artificial Bee Colony Optimization PDFNashwaShaikNo ratings yet
- Optimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationDocument6 pagesOptimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationLIEW HUI FANG UNIMAPNo ratings yet
- An Improved Clustering With Particle Swarm Optimization-Based Mobile Sink For Wireless Sensor NetworksDocument22 pagesAn Improved Clustering With Particle Swarm Optimization-Based Mobile Sink For Wireless Sensor NetworksParuthi Ilam VazhuthiNo ratings yet
- (Lecture Notes in Electrical Engineering, 696) Navid Razmjooy, Mohsen Ashourian, Zahra Foroozandeh - Metaheuristics and Optimization in Computer and Electrical Engineering-Springer (2020) PDFDocument441 pages(Lecture Notes in Electrical Engineering, 696) Navid Razmjooy, Mohsen Ashourian, Zahra Foroozandeh - Metaheuristics and Optimization in Computer and Electrical Engineering-Springer (2020) PDFyacp16761No ratings yet
- Synthesis of Phased Array Antenna For Side Lobe Level Reduction Using The Differential Evolution AlgorithmDocument6 pagesSynthesis of Phased Array Antenna For Side Lobe Level Reduction Using The Differential Evolution AlgorithmghorbanlNo ratings yet
- PsoDocument17 pagesPsoKanishka SahniNo ratings yet
- Advances On Water Quality Detection by UV-VISDocument18 pagesAdvances On Water Quality Detection by UV-VISMARLY DAYANARA CASADO CABRALNo ratings yet
- Midrange Exploration Exploitation Searching Particle Swarm Optimization in Dynamic EnvironmentDocument6 pagesMidrange Exploration Exploitation Searching Particle Swarm Optimization in Dynamic EnvironmentnorshamsiahibrahimNo ratings yet
- Abhinav Pratap Singh, Divakar Vashisth, Shalivahan SrivastavaDocument1 pageAbhinav Pratap Singh, Divakar Vashisth, Shalivahan SrivastavaSakshi MalhotraNo ratings yet
- Tuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessDocument4 pagesTuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessAnonymous WkbmWCa8MNo ratings yet
- Hydro Thermal Economic Dispatch With Renewable EnergyDocument75 pagesHydro Thermal Economic Dispatch With Renewable EnergyMohandRahimNo ratings yet
- Dynamic Economic Dispatch With Valve-Point Effect Using Crow Search AlgorithmDocument8 pagesDynamic Economic Dispatch With Valve-Point Effect Using Crow Search AlgorithmMehmet YILMAZNo ratings yet
- Comparison of Maximum Power Tracking Using Artificial Intelligence Based Optimization Controller in Photovoltaic SystemsDocument6 pagesComparison of Maximum Power Tracking Using Artificial Intelligence Based Optimization Controller in Photovoltaic Systemsindra setyawanNo ratings yet
- IEEE Access Response To ReviewersDocument5 pagesIEEE Access Response To ReviewersAayush BistaNo ratings yet
- Solving Sudoku Using Particle Swarm Optimization On CUDADocument6 pagesSolving Sudoku Using Particle Swarm Optimization On CUDAyahyagrich5No ratings yet
- Garg IJSAEMDocument12 pagesGarg IJSAEMapis21No ratings yet
- Shuffled Frog Leaping Algorithm A Memetic Meta Heuristic For Discrete OptimizationDocument27 pagesShuffled Frog Leaping Algorithm A Memetic Meta Heuristic For Discrete OptimizationRajib MandalNo ratings yet
- Curriculum VitaeDocument37 pagesCurriculum VitaepipitriaNo ratings yet
- DG Placement and Sizing in Radial Distribution Network Using PSO&HBMO AlgorithmsDocument6 pagesDG Placement and Sizing in Radial Distribution Network Using PSO&HBMO AlgorithmsDrVikas Singh BhadoriaNo ratings yet
- Paper NN PsoDocument17 pagesPaper NN PsoDEEPAKNo ratings yet