Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Chapter One 1.1Document33 pagesChapter One 1.1GODSWILL EMMANUELNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Healthspan / Bon Secours Mercy Health Executive Summary - NHRMC RFPDocument7 pagesHealthspan / Bon Secours Mercy Health Executive Summary - NHRMC RFPBen SchachtmanNo ratings yet
- Module 3 Spitting Out The HookDocument3 pagesModule 3 Spitting Out The Hookapi-538740413No ratings yet
- Introduction To Data Science Prod Edxapp Edx CDN OrgDocument32 pagesIntroduction To Data Science Prod Edxapp Edx CDN OrgFarhanaNo ratings yet
- PENJANA HRDF Guideline Place Train Aug 2020Document17 pagesPENJANA HRDF Guideline Place Train Aug 2020FarhanaNo ratings yet
- A Guide To IR - PIR Sensor Set-Up and Testing (2009)Document10 pagesA Guide To IR - PIR Sensor Set-Up and Testing (2009)FarhanaNo ratings yet
- QadrDocument1 pageQadrFarhanaNo ratings yet
- DefenseDocument91 pagesDefenseFarhanaNo ratings yet
- Automotive RoadmapDocument1 pageAutomotive RoadmapFarhanaNo ratings yet
- PSR01-F05 Course Registration FormDocument1 pagePSR01-F05 Course Registration FormFarhanaNo ratings yet
- Muharram 2013 Nov/Dec Sunday Monday Tuesday Wednesday Thursday Friday SaturdayDocument12 pagesMuharram 2013 Nov/Dec Sunday Monday Tuesday Wednesday Thursday Friday SaturdayFarhanaNo ratings yet
- Measurement-Based CSFB Target Selection PDFDocument18 pagesMeasurement-Based CSFB Target Selection PDFsepidehNo ratings yet
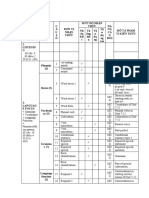
- 2. New lesson a. Matrix: Số câu: 8 Số điểm:2 Tỉ lệ %: 20%Document5 pages2. New lesson a. Matrix: Số câu: 8 Số điểm:2 Tỉ lệ %: 20%Hoàng LêNo ratings yet
- Instrumentation and Control of Heat ExchangerDocument29 pagesInstrumentation and Control of Heat Exchangerpra578No ratings yet
- Approach To Health EducationDocument21 pagesApproach To Health EducationWalterNo ratings yet
- General Physics I Module 3-4Document16 pagesGeneral Physics I Module 3-4Walter MataNo ratings yet
- Loba Chemie Price List 2018-19 PDFDocument288 pagesLoba Chemie Price List 2018-19 PDFdelta lab sangliNo ratings yet
- Phoenix: February Price ListDocument52 pagesPhoenix: February Price ListDhiman DodhiaNo ratings yet
- Eng WEEK 3 v2Document44 pagesEng WEEK 3 v2Chel CalejaNo ratings yet
- ART300Document45 pagesART300Gerlyn OrdonioNo ratings yet
- Chapter 3 Steady State Single Phase AC Circuit Analysis Part 2 1Document19 pagesChapter 3 Steady State Single Phase AC Circuit Analysis Part 2 1temesgen adugnaNo ratings yet
- Xii Economics 2022 Revision Model QuestionDocument7 pagesXii Economics 2022 Revision Model QuestionRahul RockNo ratings yet
- Fundamentals of Gas Pipeline Metering StationsDocument5 pagesFundamentals of Gas Pipeline Metering StationsSarah DeanNo ratings yet
- Mele - Free Will and NeuroscienceDocument17 pagesMele - Free Will and NeuroscienceKbkjas JvkndNo ratings yet
- What Is C-Level - Definition From WhatIsDocument5 pagesWhat Is C-Level - Definition From WhatIsAminur RahamanNo ratings yet
- F520Document2 pagesF520Marcos AldrovandiNo ratings yet
- Jsu PT3 ENGLISHDocument2 pagesJsu PT3 ENGLISHDineswari SelvamNo ratings yet
- Hs 1101 LFDocument6 pagesHs 1101 LFJavier MamarandiNo ratings yet
- What Is RC Series Circuit - Phasor Diagram and Power Curve - Circuit GlobeDocument6 pagesWhat Is RC Series Circuit - Phasor Diagram and Power Curve - Circuit GlobeAdrian WongNo ratings yet
- Employment News 30 September - 06 OctoberDocument39 pagesEmployment News 30 September - 06 OctoberNishant Pratap Singh100% (1)
- BPM CbokDocument3 pagesBPM CbokDaniel WongNo ratings yet
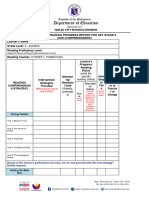
- Ks2 NC Reading Progress ReportDocument5 pagesKs2 NC Reading Progress ReportCyndee PamintuanNo ratings yet
- An Wallis Earthing Lightning ProtectionDocument117 pagesAn Wallis Earthing Lightning Protectiongoitom01No ratings yet
- GalvinDocument9 pagesGalvinІгор ШNo ratings yet
- Z370 AORUS Gaming 3: User's ManualDocument48 pagesZ370 AORUS Gaming 3: User's ManualAtrocitus RedNo ratings yet
- Corrosión Manual NalcoDocument126 pagesCorrosión Manual NalcotinovelazquezNo ratings yet
- 33 Relative and TrueDocument32 pages33 Relative and TrueArun Ketu SethNo ratings yet
- TLE6 Module5 Propagating Tress and Fruit-Bearing TreesDocument29 pagesTLE6 Module5 Propagating Tress and Fruit-Bearing TreesLorranne Maice D. Morano100% (1)