Download as pdf or txt
You might also like
- Formula Sheet 3Document31 pagesFormula Sheet 3Mohamed Hichem Guesmi100% (1)
- HOBBS (1957) - An Investigation Into The Stress Distribution in Pile Caps With Some Notes On DesignDocument34 pagesHOBBS (1957) - An Investigation Into The Stress Distribution in Pile Caps With Some Notes On DesignVítor FreitasNo ratings yet
- Design The Journal of Strain Analysis For EngineeringDocument7 pagesDesign The Journal of Strain Analysis For EngineeringKris SmaczekNo ratings yet
- Vibration Analysis of Cross-Ply Laminated Beams With General Boundary Conditions by Ritz MethodDocument16 pagesVibration Analysis of Cross-Ply Laminated Beams With General Boundary Conditions by Ritz MethodHakim KaciNo ratings yet
- A New Finite Element Formulation For Vibration Analysis of Thick PlatesDocument22 pagesA New Finite Element Formulation For Vibration Analysis of Thick PlatesMatija VasilevNo ratings yet
- Trapezoidal, Tpianguiap, and Rectangular Cross Sections: Torsion of Sandwich Panels ofDocument21 pagesTrapezoidal, Tpianguiap, and Rectangular Cross Sections: Torsion of Sandwich Panels ofHECTOR MOYANo ratings yet
- Theories and Analyses of Thin and Moderately Thick Laminated Composite Curved BeamsDocument14 pagesTheories and Analyses of Thin and Moderately Thick Laminated Composite Curved BeamsFETNI MAAMARNo ratings yet
- Nme 1620361106Document25 pagesNme 1620361106Miguel SerraNo ratings yet
- Buckling of Imperfect Thick CylindricalDocument12 pagesBuckling of Imperfect Thick CylindricalnapoleonmNo ratings yet
- Suvorov 2019 IOP Conf. Ser. Mater. Sci. Eng. 661 012002Document7 pagesSuvorov 2019 IOP Conf. Ser. Mater. Sci. Eng. 661 012002yonghao liuNo ratings yet
- Kang 2015Document7 pagesKang 2015ahmet ergüveNo ratings yet
- Moment - Curvature Relationships of Reinforced Concrete MembersDocument4 pagesMoment - Curvature Relationships of Reinforced Concrete MembersUnknownNo ratings yet
- SegedinDocument14 pagesSegedinCiprian ComanNo ratings yet
- National FOR: Advisory Committee AeronauticsDocument108 pagesNational FOR: Advisory Committee AeronauticsSahithi GullalaNo ratings yet
- Analysis of Hollow-Core Slab Oors: January 2005Document14 pagesAnalysis of Hollow-Core Slab Oors: January 2005N TNo ratings yet
- AlibakhshiDocument10 pagesAlibakhshiHakim KaciNo ratings yet
- Dynamic Analysis of Thick Plates Including Deep BeDocument14 pagesDynamic Analysis of Thick Plates Including Deep BeAliouane MhamedNo ratings yet
- Influence of Rib Stiffeners On The Buckling Strength of Elastically Supported TubesDocument9 pagesInfluence of Rib Stiffeners On The Buckling Strength of Elastically Supported TubesWaseem AkramNo ratings yet
- Bhardwaj2008 PDFDocument20 pagesBhardwaj2008 PDFIago Freitas de AlmeidaNo ratings yet
- Vibration Analysis of Plates With Cutouts by The Modified Rayleigh-Ritz MethodDocument12 pagesVibration Analysis of Plates With Cutouts by The Modified Rayleigh-Ritz Methodkrisbhaskar22-1No ratings yet
- On Bending of Elastic Plates : Parallel To The Plane of The PlateDocument14 pagesOn Bending of Elastic Plates : Parallel To The Plane of The PlateAesyah Fadhilah pratiwiNo ratings yet
- Composite Cantilever PlatesDocument7 pagesComposite Cantilever PlatesDharmeswar SahNo ratings yet
- On The Nite Displacement Analysis of Quadrangular Plates: A.V. Singh, Y. ElaghabashDocument14 pagesOn The Nite Displacement Analysis of Quadrangular Plates: A.V. Singh, Y. ElaghabashGeethika KadhamNo ratings yet
- Elastic Stress Parameters in Simply Supported Skew Plates in FlexureDocument9 pagesElastic Stress Parameters in Simply Supported Skew Plates in Flexureluna luneraNo ratings yet
- Free In-Plane Vibration Analysis of Rectangular Plates by The Method of SuperpositionDocument21 pagesFree In-Plane Vibration Analysis of Rectangular Plates by The Method of Superpositionshashank soniNo ratings yet
- Giaonx,+5 TIThinh THQuocDocument13 pagesGiaonx,+5 TIThinh THQuocvsamir444No ratings yet
- Leissa - The Free Vibration of Rectangular PlatesDocument37 pagesLeissa - The Free Vibration of Rectangular Platesallentvm100% (1)
- Free Vibration Analysis of Timoshenko Beams UnderDocument16 pagesFree Vibration Analysis of Timoshenko Beams UnderolavusNo ratings yet
- Free Vibration Analysis of Beams by Using A Third-Order Shear Deformation TheoryDocument13 pagesFree Vibration Analysis of Beams by Using A Third-Order Shear Deformation TheoryalokjietNo ratings yet
- Elastic Buckling of Orthotropic Plates Under Varying Axial StressesDocument8 pagesElastic Buckling of Orthotropic Plates Under Varying Axial StressesManish ShashikantNo ratings yet
- Analytical Model For Seismic Retrofit of Concrete Beam-Column Joint Using Diagonal Metallic HaunchDocument10 pagesAnalytical Model For Seismic Retrofit of Concrete Beam-Column Joint Using Diagonal Metallic HaunchGiuseppe TizzaniNo ratings yet
- Nonlinear Vibrations of Thin Hyperelastic Plates: Ivan Breslavsky, Marco Amabili, Mathias LegrandDocument10 pagesNonlinear Vibrations of Thin Hyperelastic Plates: Ivan Breslavsky, Marco Amabili, Mathias LegrandABINAS NAYAKNo ratings yet
- Zhou 2002Document15 pagesZhou 2002علي حمزة الخفاجيNo ratings yet
- SzlendakGryniewicz-FEMmodel Diaphragmactioneffectsv 0 95Document9 pagesSzlendakGryniewicz-FEMmodel Diaphragmactioneffectsv 0 95Ivan BurtovoyNo ratings yet
- Flat Slab by FemDocument8 pagesFlat Slab by Femanuj kumarNo ratings yet
- Architecture Absorbing Auc06 Babtie PDFDocument18 pagesArchitecture Absorbing Auc06 Babtie PDFAnupEkboteNo ratings yet
- Journal of Sound and Vibration: C.S. Huang, A.W. Leissa, R.S. LiDocument15 pagesJournal of Sound and Vibration: C.S. Huang, A.W. Leissa, R.S. LimasoudNo ratings yet
- Extension of A Semi-Analytical Approach To Determine Natural Frequency and Mode Shape of Orthotropic Steel BridgeDocument17 pagesExtension of A Semi-Analytical Approach To Determine Natural Frequency and Mode Shape of Orthotropic Steel BridgeAjithNo ratings yet
- Analysis of Cold-Formed Zed-Purlins Partially Restrained by Steel SheetingDocument9 pagesAnalysis of Cold-Formed Zed-Purlins Partially Restrained by Steel SheetingamokeNo ratings yet
- Martin&Randolph IACMAG 01Document13 pagesMartin&Randolph IACMAG 01julianaruiz06No ratings yet
- First-Order Generalised Beam Theory: J. M. Davies & PDocument34 pagesFirst-Order Generalised Beam Theory: J. M. Davies & PVincenzo PilusoNo ratings yet
- Icsv 28 (2022) 178 - DSS KKVDocument8 pagesIcsv 28 (2022) 178 - DSS KKVKarthik SankarNo ratings yet
- Center of Gravity and Shear Center of Thin-Walled Open-Section Composite BeamsDocument6 pagesCenter of Gravity and Shear Center of Thin-Walled Open-Section Composite Beamsredz00100% (1)
- Rasmussen K Bifurcation Locally Buckled Members 1997 38 BCKL Loc DistDocument38 pagesRasmussen K Bifurcation Locally Buckled Members 1997 38 BCKL Loc DistRicardo Parra ArangoNo ratings yet
- Buckling Behavior of Cold-Formed Zed-Purlins Partially Restrained by Steel SheetingDocument12 pagesBuckling Behavior of Cold-Formed Zed-Purlins Partially Restrained by Steel SheetingamokeNo ratings yet
- Buckling of Composite PlatesDocument16 pagesBuckling of Composite PlatesEsra GürünNo ratings yet
- Theories and Analyses of Thin and Moderately Thick Laminated Composite Curved BeamsDocument14 pagesTheories and Analyses of Thin and Moderately Thick Laminated Composite Curved BeamsTejas GotkhindiNo ratings yet
- Analytical Solutions For A Uniformly Loaded Circular Plate With Clamped EdgesDocument6 pagesAnalytical Solutions For A Uniformly Loaded Circular Plate With Clamped EdgesGiovani MartinsNo ratings yet
- Analysis of Composite Bridge Superstructures Using Modified Grillage MethodDocument12 pagesAnalysis of Composite Bridge Superstructures Using Modified Grillage MethodAmmar A. AliNo ratings yet
- Stiffened Plates PDFDocument16 pagesStiffened Plates PDFfarhadmrt6923No ratings yet
- Numerical Analysis of Free Vibrations of Laminated Composite Conical and Cylindrical Shells: Discrete Singular Convolution (DSC) ApproachDocument21 pagesNumerical Analysis of Free Vibrations of Laminated Composite Conical and Cylindrical Shells: Discrete Singular Convolution (DSC) ApproachjssrikantamurthyNo ratings yet
- Stresses in Hi-Metal Thermostats: E. SuhirDocument4 pagesStresses in Hi-Metal Thermostats: E. SuhirTomislav SertićNo ratings yet
- A Curved Finite Element For Thin ElasticDocument38 pagesA Curved Finite Element For Thin ElasticJosé Cléber Rodrigues da SilvaNo ratings yet
- Orthogonally Stiffened Plates Hoppman W.H. 1953Document46 pagesOrthogonally Stiffened Plates Hoppman W.H. 1953Iliyah87No ratings yet
- Analysis of Hollow-Core Slab Floors PDFDocument13 pagesAnalysis of Hollow-Core Slab Floors PDFFrancisco GoFlesNo ratings yet
- On The Deformation of Layered Composite Arches Using Exponential Shear and Normal Deformation Theory (13.09.2023)Document11 pagesOn The Deformation of Layered Composite Arches Using Exponential Shear and Normal Deformation Theory (13.09.2023)Velchuri SairamNo ratings yet
- Nonlinear Impact Response of Doubly Curved Composite ShellsDocument6 pagesNonlinear Impact Response of Doubly Curved Composite ShellsVenkata Swamy Naidu NeigapulaNo ratings yet
- Effect of Winkler Foundation On Frequencies and Mode Shapes of Rectangular Plates Under Varying In-Plane Stresses by DQMDocument17 pagesEffect of Winkler Foundation On Frequencies and Mode Shapes of Rectangular Plates Under Varying In-Plane Stresses by DQMSalam FaithNo ratings yet
- Nonlinear Strain Gradient Elastic Thin SDocument19 pagesNonlinear Strain Gradient Elastic Thin SJosé Cléber Rodrigues da SilvaNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 2 - 3 Force Mass AccelerationDocument15 pages2 - 3 Force Mass Accelerationanton082117No ratings yet
- Hindustan Motors Pricelist-42-106-04-2022Document31 pagesHindustan Motors Pricelist-42-106-04-2022Venkateshwar DevendlaNo ratings yet
- United States Patent (19) : WeberDocument12 pagesUnited States Patent (19) : Weberaless2056No ratings yet
- API Table 54b PDF FreeDocument1 pageAPI Table 54b PDF FreeAsdi SInrangNo ratings yet
- Chittagong University of Engineering and TechnologyDocument16 pagesChittagong University of Engineering and TechnologyTahshin AbrarNo ratings yet
- ES 223 Statics and Strengh of Materials: Force System ResultantsDocument6 pagesES 223 Statics and Strengh of Materials: Force System ResultantsserhatNo ratings yet
- BIẾN TẤN SOHODocument8 pagesBIẾN TẤN SOHOpo truong100% (1)
- Khaled GalalDocument1 pageKhaled Galalkhaled galalNo ratings yet
- Report 3 Schlieren Visualisation of Over-Expanded NozzleDocument6 pagesReport 3 Schlieren Visualisation of Over-Expanded NozzleAbhishek DhakneNo ratings yet
- Load Test On Single Phase Transformer: Shubham Sharma: RA2111003010611: 28.10.21Document11 pagesLoad Test On Single Phase Transformer: Shubham Sharma: RA2111003010611: 28.10.21shubhamNo ratings yet
- ROX000318781 - AF Functional Description For Roxar 2600 MPFMDocument34 pagesROX000318781 - AF Functional Description For Roxar 2600 MPFMOmar Al SousliNo ratings yet
- MIN-540 Lecture 1Document11 pagesMIN-540 Lecture 1aashishkmishra9No ratings yet
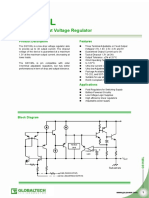
- GS1185L GlobaltechDocument14 pagesGS1185L GlobaltechPristisNo ratings yet
- A.1 Fundamental Properties of FluidsDocument4 pagesA.1 Fundamental Properties of FluidsMarben Leynes-Cereno Agustin-ViernesNo ratings yet
- Grid-Connected PV Inverter: User ManualDocument47 pagesGrid-Connected PV Inverter: User ManualMauricio BazzoNo ratings yet
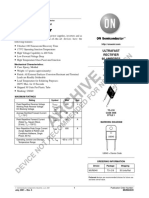
- MUR6040 Switchmode Power Rectifier: Ultrafast Rectifier 60 Amperes 400 VOLTSDocument4 pagesMUR6040 Switchmode Power Rectifier: Ultrafast Rectifier 60 Amperes 400 VOLTSAbraham GutierrezNo ratings yet
- Copeland Compresor 2019 ECT2014DS78 PDFDocument166 pagesCopeland Compresor 2019 ECT2014DS78 PDFFrancisco Sanchez RNo ratings yet
- Expt. No. 3 Calibration of Temperature Measuring Device ExperimentDocument7 pagesExpt. No. 3 Calibration of Temperature Measuring Device ExperimentShinichi KudoNo ratings yet
- Silicon NPN Triple Diffusion Mesa Type: Power TransistorsDocument3 pagesSilicon NPN Triple Diffusion Mesa Type: Power TransistorsVitorio LogoNo ratings yet
- Air Conditioning ExampleDocument22 pagesAir Conditioning ExampleVinMaximusNo ratings yet
- Modeling of Cooling and Solidification of TNT Based Cast High Explosives ChargesDocument5 pagesModeling of Cooling and Solidification of TNT Based Cast High Explosives ChargesnanocardosoNo ratings yet
- 31-12-2022 - SR - Super60 - NUCLEUS & STERLING - BT - Jee-Main-PTM-16 - Q.PAPERDocument22 pages31-12-2022 - SR - Super60 - NUCLEUS & STERLING - BT - Jee-Main-PTM-16 - Q.PAPERSameena LoniNo ratings yet
- Bta16 600B ArkDocument1 pageBta16 600B ArkBhadreshkumar SharmaNo ratings yet
- 15 - Wave MotionDocument40 pages15 - Wave MotionDeepakGuptaNo ratings yet
- Impact Test Report: Pitti Castings PVT LTDDocument1 pageImpact Test Report: Pitti Castings PVT LTDESHWAR CHARYNo ratings yet
- JS120 Single Axis Fingertip Joystick: Features and Options Mobile Machine ManagementDocument2 pagesJS120 Single Axis Fingertip Joystick: Features and Options Mobile Machine ManagementStelian CrisanNo ratings yet
- (EDITED-FINAL) Sludge - Storage CalculationDocument17 pages(EDITED-FINAL) Sludge - Storage CalculationIftikhar KamranNo ratings yet
- Constitutive Relations: Dr. Rakesh K KapaniaDocument43 pagesConstitutive Relations: Dr. Rakesh K KapaniavictorNo ratings yet