
Generalized Decoupled and Object Space Shading System
Generalized Decoupled and Object Space Shading System
You might also like
- 33 Milliseconds - Public With NotesDocument38 pages33 Milliseconds - Public With Notesc0de517e.blogspot.com100% (1)
- An Adaptive Acceleration Structure For Screen-Space Ray TracingDocument10 pagesAn Adaptive Acceleration Structure For Screen-Space Ray TracingOlaru OlaruNo ratings yet
- Efficient Sparse Voxel OctreesDocument30 pagesEfficient Sparse Voxel OctreesAmogh RaoNo ratings yet
- Fast Mobile DepthDocument10 pagesFast Mobile Depthder tupNo ratings yet
- ASs2 5Document8 pagesASs2 5dibekayaNo ratings yet
- Clustered Shading PreprintDocument10 pagesClustered Shading PreprintasdNo ratings yet
- Real-Time Neural Rendering of Large-Scale Scenes On The WebDocument15 pagesReal-Time Neural Rendering of Large-Scale Scenes On The Webenglishfocus0No ratings yet
- Hilbert Curve Based Bucket Ordering For Global IlluminationDocument8 pagesHilbert Curve Based Bucket Ordering For Global IlluminationJournal of ComputingNo ratings yet
- Efficient Sparse Voxel Octrees: Samuli Laine Tero Karras NVIDIA ResearchDocument9 pagesEfficient Sparse Voxel Octrees: Samuli Laine Tero Karras NVIDIA Researchgoheh52264No ratings yet
- SGI RealityEngineDocument8 pagesSGI RealityEnginebugmenomoreNo ratings yet
- PNEN: Pyramid Non-Local Enhanced Networks: Feida Zhu, Chaowei Fang, and Kai-Kuang Ma, Fellow, IEEEDocument11 pagesPNEN: Pyramid Non-Local Enhanced Networks: Feida Zhu, Chaowei Fang, and Kai-Kuang Ma, Fellow, IEEEsimonfxNo ratings yet
- Xu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperDocument11 pagesXu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperS Divakar BhatNo ratings yet
- MaskPlace - Fast Chip Placement Via Reinforced Visual Representation LearningDocument21 pagesMaskPlace - Fast Chip Placement Via Reinforced Visual Representation Learningxzxuan2005No ratings yet
- Li Recurrent Feature Reasoning For Image Inpainting CVPR 2020 PaperDocument9 pagesLi Recurrent Feature Reasoning For Image Inpainting CVPR 2020 PaperNUR AFIQAH SABIRAH MOHAMMAD SABRINo ratings yet
- Terrain Rendering in Frostbite Using Procedural Shader SplattingDocument21 pagesTerrain Rendering in Frostbite Using Procedural Shader SplattingmikesfbayNo ratings yet
- Eficient Integration of TSDF in Mobile Devices 2023Document10 pagesEficient Integration of TSDF in Mobile Devices 2023jomamuregNo ratings yet
- ( ' Computer Graphics, Volume 21, Number 4, July 1987Document8 pages( ' Computer Graphics, Volume 21, Number 4, July 1987Aura MateiuNo ratings yet
- Super SampleDocument12 pagesSuper SampleLmao companyNo ratings yet
- Fast Bilateral-Space Stereo For Synthetic DefocusDocument9 pagesFast Bilateral-Space Stereo For Synthetic Defocusyuheng weiNo ratings yet
- Adabins: Depth Estimation Using Adaptive Bins: Shariq Farooq Bhat Kaust Ibraheem Alhashim Kaust Peter Wonka KaustDocument13 pagesAdabins: Depth Estimation Using Adaptive Bins: Shariq Farooq Bhat Kaust Ibraheem Alhashim Kaust Peter Wonka KaustgeilsonNo ratings yet
- 2018 - Sony Pictures Imageworks ArnoldDocument18 pages2018 - Sony Pictures Imageworks ArnoldQwkutiubbNo ratings yet
- NeuralFusion Online Depth Fusion in Latent Space CVPRDocument11 pagesNeuralFusion Online Depth Fusion in Latent Space CVPRHarre Bams Ayma ArandaNo ratings yet
- An Interactive Out-of-Core Rendering Framework ForDocument13 pagesAn Interactive Out-of-Core Rendering Framework Forbodhisatwa mishraNo ratings yet
- Deep Learning Stereo Vision at The Edge: Luca Puglia and Cormac BrickDocument10 pagesDeep Learning Stereo Vision at The Edge: Luca Puglia and Cormac BrickChulbul PandeyNo ratings yet
- High-Fidelity Neural Surface ReconstructionDocument18 pagesHigh-Fidelity Neural Surface Reconstructiondvae fredNo ratings yet
- Remotesensing 14 02472 v4Document14 pagesRemotesensing 14 02472 v4GeHad MoheyNo ratings yet
- 2018 - The Design and Evolution of Disney's Hyperion RendererDocument22 pages2018 - The Design and Evolution of Disney's Hyperion RendererQwkutiubbNo ratings yet
- Get PDF2 INMIC2005Document7 pagesGet PDF2 INMIC2005els01xNo ratings yet
- The Pixelflow Texture and Image Subsystem: Steven MolnarDocument11 pagesThe Pixelflow Texture and Image Subsystem: Steven Molnarnewtonchen100% (2)
- Multi-Scale Terrain Texturing Using GenerativeDocument6 pagesMulti-Scale Terrain Texturing Using GenerativePawelek17No ratings yet
- NeuManifold: Neural Watertight Manifold Reconstruction With Efficient and High-Quality Rendering SupportDocument16 pagesNeuManifold: Neural Watertight Manifold Reconstruction With Efficient and High-Quality Rendering SupportMichael RoweNo ratings yet
- Efficient GPU Screen-Space Ray TracingDocument13 pagesEfficient GPU Screen-Space Ray TracingOlaru OlaruNo ratings yet
- 807418Document6 pages807418AirtonJordaniNo ratings yet
- Interactive Inspection of Complex Multi-Object Industrial AssembliesDocument17 pagesInteractive Inspection of Complex Multi-Object Industrial AssembliesRares BentaNo ratings yet
- MobileNetV2 Inverted Residuals and Linear BottlenecksDocument11 pagesMobileNetV2 Inverted Residuals and Linear BottlenecksPedro PietrafesaNo ratings yet
- X3D: Expanding Architectures For Efficient Video RecognitionDocument11 pagesX3D: Expanding Architectures For Efficient Video RecognitionPAARTH BIRNo ratings yet
- RavgDocument10 pagesRavgBrandonNo ratings yet
- Deep Convolution Networks For Compression ArtifactDocument14 pagesDeep Convolution Networks For Compression Artifactai rednaNo ratings yet
- Revisiting Deformable Convolution For Depth Completion: Xinglong Sun, Jean Ponce, and Yu-Xiong WangDocument7 pagesRevisiting Deformable Convolution For Depth Completion: Xinglong Sun, Jean Ponce, and Yu-Xiong WangbibekNo ratings yet
- Mesh LabDocument8 pagesMesh LabnzagzoogNo ratings yet
- Real-Time High-Resolution Background MattingDocument16 pagesReal-Time High-Resolution Background MattingAnanya SaikiaNo ratings yet
- Cache-Guided Scheduling: Exploiting Caches To Maximize Locality in Graph ProcessingDocument8 pagesCache-Guided Scheduling: Exploiting Caches To Maximize Locality in Graph ProcessingGoblenNo ratings yet
- A Simple Baseline For Video Restoration With Grouped Spatial-Temporal ShiftDocument14 pagesA Simple Baseline For Video Restoration With Grouped Spatial-Temporal Shift黃丰楷No ratings yet
- Blitznet: A Real-Time Deep Network For Scene UnderstandingDocument11 pagesBlitznet: A Real-Time Deep Network For Scene Understandingumme sultanaNo ratings yet
- IEEEVis2016 OSPRay Paper SmallDocument10 pagesIEEEVis2016 OSPRay Paper SmallSteve AttwoodNo ratings yet
- 6 SegnetDocument14 pages6 SegnetSUMOD SUNDARNo ratings yet
- Auto Splats: Dynamic Point Cloud Visualization On The GPUDocument10 pagesAuto Splats: Dynamic Point Cloud Visualization On The GPU张啊康No ratings yet
- NARF22: Neural Articulated Radiance Fields For Configuration-Aware RenderingDocument8 pagesNARF22: Neural Articulated Radiance Fields For Configuration-Aware RenderingIgo AndradeNo ratings yet
- Non-Local Neural NetworksDocument10 pagesNon-Local Neural NetworksEmran SalehNo ratings yet
- A Real-Time Object Detection Processor With Xnor-BDocument13 pagesA Real-Time Object Detection Processor With Xnor-BcattiewpieNo ratings yet
- Mescheder Occupancy Networks Learning 3D Reconstruction in Function Space CVPR 2019 PaperDocument11 pagesMescheder Occupancy Networks Learning 3D Reconstruction in Function Space CVPR 2019 PaperQinan ZhangNo ratings yet
- Simlod: Simultaneous Lod Generation and RenderingDocument12 pagesSimlod: Simultaneous Lod Generation and RenderingcleanerhokNo ratings yet
- EdgeConnect Structure Guided Image Inpainting Using Edge PredictionDocument10 pagesEdgeConnect Structure Guided Image Inpainting Using Edge Predictiontthod37No ratings yet
- Neural Denoising For Deep Z Monte Carlo Renderings PaperDocument18 pagesNeural Denoising For Deep Z Monte Carlo Renderings Paperwvr9rpbdmnNo ratings yet
- MERF: Memory-Efficient Radiance Fields For Real-Time View Synthesis in Unbounded ScenesDocument10 pagesMERF: Memory-Efficient Radiance Fields For Real-Time View Synthesis in Unbounded ScenesVetal YeshorNo ratings yet
- Remotesensing 13 04700 v2Document21 pagesRemotesensing 13 04700 v2Elena BoneaNo ratings yet
- VoxNet A 3D Convolutional Neural Network For Real-Time Object RecognitionDocument7 pagesVoxNet A 3D Convolutional Neural Network For Real-Time Object RecognitionNyein Thu Thu AungNo ratings yet
- Vastgaussian: Vast 3D Gaussians For Large Scene ReconstructionDocument12 pagesVastgaussian: Vast 3D Gaussians For Large Scene ReconstructionthuangiovnNo ratings yet
- A Ray-Box Intersection Algorithm and Efficient Dynamic Voxel RenderingDocument17 pagesA Ray-Box Intersection Algorithm and Efficient Dynamic Voxel RenderingAnuvesh KumarNo ratings yet
- Hidden Surface Determination: Unveiling the Secrets of Computer VisionFrom EverandHidden Surface Determination: Unveiling the Secrets of Computer VisionNo ratings yet
- Fnins 14 00104Document16 pagesFnins 14 00104alexHamilNo ratings yet
- Journal of Statistical Software: Using GNU Make To Manage The Workflow of Data Analysis ProjectsDocument46 pagesJournal of Statistical Software: Using GNU Make To Manage The Workflow of Data Analysis ProjectsalexHamilNo ratings yet
- Efficient Tree Solver For Hines Matrices On The GPUDocument11 pagesEfficient Tree Solver For Hines Matrices On The GPUalexHamilNo ratings yet
- MSC Thesis Jianyu Chen 2Document50 pagesMSC Thesis Jianyu Chen 2alexHamilNo ratings yet
- Bringing Unreal Engine To The Browser Wonder Interactive Jul22Document9 pagesBringing Unreal Engine To The Browser Wonder Interactive Jul22alexHamilNo ratings yet
- Autodesk 2016Document4 pagesAutodesk 2016Elena García DelgadoNo ratings yet
- Ansa Kinematics Tool PDFDocument3 pagesAnsa Kinematics Tool PDFRavi KumarNo ratings yet
- CAD-CAM Software Comparison TableDocument3 pagesCAD-CAM Software Comparison TableMike Dixon67% (3)
- Unigraphics NX 10 HelpDocument2 pagesUnigraphics NX 10 HelpVinodh KumarNo ratings yet
- Multiview ProjectionDocument21 pagesMultiview Projectionjaderic buisingNo ratings yet
- The Application of Pro Engineer in CADCAMDocument9 pagesThe Application of Pro Engineer in CADCAMHafiezul HassanNo ratings yet
- INSTALLINFODocument3 pagesINSTALLINFOmagnamayuNo ratings yet
- 3D PrintingDocument26 pages3D Printing9986212378No ratings yet
- Nazia Ansari CV New - MDocument4 pagesNazia Ansari CV New - MNazia AnsariNo ratings yet
- Edc PDFDocument7 pagesEdc PDFKarim SamhyNo ratings yet
- Full Ebook of Finite Element Analysis For Design Engineers Second Edition Paul M Kurowski Online PDF All ChapterDocument69 pagesFull Ebook of Finite Element Analysis For Design Engineers Second Edition Paul M Kurowski Online PDF All Chapterbafirifet100% (12)
- Contenido AutodeskDocument46 pagesContenido Autodeskkalin3169899No ratings yet
- 3D Printing in Orthodontics: DR - Mohnish KumarDocument20 pages3D Printing in Orthodontics: DR - Mohnish Kumararpit maraikayarNo ratings yet
- Design and Analysis of A Tubular Space Frame Chassis For FSAE ApplicationDocument7 pagesDesign and Analysis of A Tubular Space Frame Chassis For FSAE ApplicationAjay bhosaleNo ratings yet
- Mimics Student Edition Course BookDocument83 pagesMimics Student Edition Course BookIngrid GriselNo ratings yet
- Opengl Lighting and TexturingDocument5 pagesOpengl Lighting and TexturingMohammad Mohsen AmiriNo ratings yet
- Introduction Computer Aided EngineeringDocument11 pagesIntroduction Computer Aided EngineeringnyenookeNo ratings yet
- Computer Science Bacs2173 Graphics ProgrammingDocument6 pagesComputer Science Bacs2173 Graphics ProgrammingLEE KIT KHEN KENNo ratings yet
- Instrucciones de Instalación Autodesk 2016Document4 pagesInstrucciones de Instalación Autodesk 2016Mendoza Moya MarcosNo ratings yet
- The Girolamo Amati Viola in The Galleria EstenseDocument72 pagesThe Girolamo Amati Viola in The Galleria EstenseSalvador Maura RieraNo ratings yet
- Lecture12 Texture MappingDocument22 pagesLecture12 Texture MappingnasralaNo ratings yet
- Solidworks DrawingsDocument519 pagesSolidworks Drawingsinthemoney8100% (21)
- Lista de Preços Do Produto Haas PDFDocument66 pagesLista de Preços Do Produto Haas PDFJosé CostaNo ratings yet
- Question Bank With Answers For Maya BasicDocument18 pagesQuestion Bank With Answers For Maya Basicfojibaba82% (11)
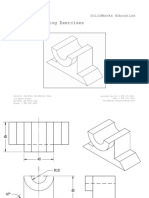
- Detailed Drawing Exercises: Solidworks EducationDocument51 pagesDetailed Drawing Exercises: Solidworks EducationMajd HusseinNo ratings yet
- Ansa Meta For CFD PresentationDocument110 pagesAnsa Meta For CFD PresentationivanNo ratings yet
- Lecture01 - CAD CAM - CAE - Introduction of The CourseDocument21 pagesLecture01 - CAD CAM - CAE - Introduction of The CourseSameer shaikhNo ratings yet
- Autodesk 2014 ProductDocument3 pagesAutodesk 2014 ProductvesnatekicNo ratings yet
- GP PracDocument22 pagesGP PracVAIBHAVI SHIVTARKARNo ratings yet
- ADocument3 pagesARenan FreitasNo ratings yet






























































































Download as pdf or txt
You might also like
- 33 Milliseconds - Public With NotesDocument38 pages33 Milliseconds - Public With Notesc0de517e.blogspot.com100% (1)
- An Adaptive Acceleration Structure For Screen-Space Ray TracingDocument10 pagesAn Adaptive Acceleration Structure For Screen-Space Ray TracingOlaru OlaruNo ratings yet
- Efficient Sparse Voxel OctreesDocument30 pagesEfficient Sparse Voxel OctreesAmogh RaoNo ratings yet
- Fast Mobile DepthDocument10 pagesFast Mobile Depthder tupNo ratings yet
- ASs2 5Document8 pagesASs2 5dibekayaNo ratings yet
- Clustered Shading PreprintDocument10 pagesClustered Shading PreprintasdNo ratings yet
- Real-Time Neural Rendering of Large-Scale Scenes On The WebDocument15 pagesReal-Time Neural Rendering of Large-Scale Scenes On The Webenglishfocus0No ratings yet
- Hilbert Curve Based Bucket Ordering For Global IlluminationDocument8 pagesHilbert Curve Based Bucket Ordering For Global IlluminationJournal of ComputingNo ratings yet
- Efficient Sparse Voxel Octrees: Samuli Laine Tero Karras NVIDIA ResearchDocument9 pagesEfficient Sparse Voxel Octrees: Samuli Laine Tero Karras NVIDIA Researchgoheh52264No ratings yet
- SGI RealityEngineDocument8 pagesSGI RealityEnginebugmenomoreNo ratings yet
- PNEN: Pyramid Non-Local Enhanced Networks: Feida Zhu, Chaowei Fang, and Kai-Kuang Ma, Fellow, IEEEDocument11 pagesPNEN: Pyramid Non-Local Enhanced Networks: Feida Zhu, Chaowei Fang, and Kai-Kuang Ma, Fellow, IEEEsimonfxNo ratings yet
- Xu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperDocument11 pagesXu DisCoScene Spatially Disentangled Generative Radiance Fields For Controllable 3D-Aware Scene CVPR 2023 PaperS Divakar BhatNo ratings yet
- MaskPlace - Fast Chip Placement Via Reinforced Visual Representation LearningDocument21 pagesMaskPlace - Fast Chip Placement Via Reinforced Visual Representation Learningxzxuan2005No ratings yet
- Li Recurrent Feature Reasoning For Image Inpainting CVPR 2020 PaperDocument9 pagesLi Recurrent Feature Reasoning For Image Inpainting CVPR 2020 PaperNUR AFIQAH SABIRAH MOHAMMAD SABRINo ratings yet
- Terrain Rendering in Frostbite Using Procedural Shader SplattingDocument21 pagesTerrain Rendering in Frostbite Using Procedural Shader SplattingmikesfbayNo ratings yet
- Eficient Integration of TSDF in Mobile Devices 2023Document10 pagesEficient Integration of TSDF in Mobile Devices 2023jomamuregNo ratings yet
- ( ' Computer Graphics, Volume 21, Number 4, July 1987Document8 pages( ' Computer Graphics, Volume 21, Number 4, July 1987Aura MateiuNo ratings yet
- Super SampleDocument12 pagesSuper SampleLmao companyNo ratings yet
- Fast Bilateral-Space Stereo For Synthetic DefocusDocument9 pagesFast Bilateral-Space Stereo For Synthetic Defocusyuheng weiNo ratings yet
- Adabins: Depth Estimation Using Adaptive Bins: Shariq Farooq Bhat Kaust Ibraheem Alhashim Kaust Peter Wonka KaustDocument13 pagesAdabins: Depth Estimation Using Adaptive Bins: Shariq Farooq Bhat Kaust Ibraheem Alhashim Kaust Peter Wonka KaustgeilsonNo ratings yet
- 2018 - Sony Pictures Imageworks ArnoldDocument18 pages2018 - Sony Pictures Imageworks ArnoldQwkutiubbNo ratings yet
- NeuralFusion Online Depth Fusion in Latent Space CVPRDocument11 pagesNeuralFusion Online Depth Fusion in Latent Space CVPRHarre Bams Ayma ArandaNo ratings yet
- An Interactive Out-of-Core Rendering Framework ForDocument13 pagesAn Interactive Out-of-Core Rendering Framework Forbodhisatwa mishraNo ratings yet
- Deep Learning Stereo Vision at The Edge: Luca Puglia and Cormac BrickDocument10 pagesDeep Learning Stereo Vision at The Edge: Luca Puglia and Cormac BrickChulbul PandeyNo ratings yet
- High-Fidelity Neural Surface ReconstructionDocument18 pagesHigh-Fidelity Neural Surface Reconstructiondvae fredNo ratings yet
- Remotesensing 14 02472 v4Document14 pagesRemotesensing 14 02472 v4GeHad MoheyNo ratings yet
- 2018 - The Design and Evolution of Disney's Hyperion RendererDocument22 pages2018 - The Design and Evolution of Disney's Hyperion RendererQwkutiubbNo ratings yet
- Get PDF2 INMIC2005Document7 pagesGet PDF2 INMIC2005els01xNo ratings yet
- The Pixelflow Texture and Image Subsystem: Steven MolnarDocument11 pagesThe Pixelflow Texture and Image Subsystem: Steven Molnarnewtonchen100% (2)
- Multi-Scale Terrain Texturing Using GenerativeDocument6 pagesMulti-Scale Terrain Texturing Using GenerativePawelek17No ratings yet
- NeuManifold: Neural Watertight Manifold Reconstruction With Efficient and High-Quality Rendering SupportDocument16 pagesNeuManifold: Neural Watertight Manifold Reconstruction With Efficient and High-Quality Rendering SupportMichael RoweNo ratings yet
- Efficient GPU Screen-Space Ray TracingDocument13 pagesEfficient GPU Screen-Space Ray TracingOlaru OlaruNo ratings yet
- 807418Document6 pages807418AirtonJordaniNo ratings yet
- Interactive Inspection of Complex Multi-Object Industrial AssembliesDocument17 pagesInteractive Inspection of Complex Multi-Object Industrial AssembliesRares BentaNo ratings yet
- MobileNetV2 Inverted Residuals and Linear BottlenecksDocument11 pagesMobileNetV2 Inverted Residuals and Linear BottlenecksPedro PietrafesaNo ratings yet
- X3D: Expanding Architectures For Efficient Video RecognitionDocument11 pagesX3D: Expanding Architectures For Efficient Video RecognitionPAARTH BIRNo ratings yet
- RavgDocument10 pagesRavgBrandonNo ratings yet
- Deep Convolution Networks For Compression ArtifactDocument14 pagesDeep Convolution Networks For Compression Artifactai rednaNo ratings yet
- Revisiting Deformable Convolution For Depth Completion: Xinglong Sun, Jean Ponce, and Yu-Xiong WangDocument7 pagesRevisiting Deformable Convolution For Depth Completion: Xinglong Sun, Jean Ponce, and Yu-Xiong WangbibekNo ratings yet
- Mesh LabDocument8 pagesMesh LabnzagzoogNo ratings yet
- Real-Time High-Resolution Background MattingDocument16 pagesReal-Time High-Resolution Background MattingAnanya SaikiaNo ratings yet
- Cache-Guided Scheduling: Exploiting Caches To Maximize Locality in Graph ProcessingDocument8 pagesCache-Guided Scheduling: Exploiting Caches To Maximize Locality in Graph ProcessingGoblenNo ratings yet
- A Simple Baseline For Video Restoration With Grouped Spatial-Temporal ShiftDocument14 pagesA Simple Baseline For Video Restoration With Grouped Spatial-Temporal Shift黃丰楷No ratings yet
- Blitznet: A Real-Time Deep Network For Scene UnderstandingDocument11 pagesBlitznet: A Real-Time Deep Network For Scene Understandingumme sultanaNo ratings yet
- IEEEVis2016 OSPRay Paper SmallDocument10 pagesIEEEVis2016 OSPRay Paper SmallSteve AttwoodNo ratings yet
- 6 SegnetDocument14 pages6 SegnetSUMOD SUNDARNo ratings yet
- Auto Splats: Dynamic Point Cloud Visualization On The GPUDocument10 pagesAuto Splats: Dynamic Point Cloud Visualization On The GPU张啊康No ratings yet
- NARF22: Neural Articulated Radiance Fields For Configuration-Aware RenderingDocument8 pagesNARF22: Neural Articulated Radiance Fields For Configuration-Aware RenderingIgo AndradeNo ratings yet
- Non-Local Neural NetworksDocument10 pagesNon-Local Neural NetworksEmran SalehNo ratings yet
- A Real-Time Object Detection Processor With Xnor-BDocument13 pagesA Real-Time Object Detection Processor With Xnor-BcattiewpieNo ratings yet
- Mescheder Occupancy Networks Learning 3D Reconstruction in Function Space CVPR 2019 PaperDocument11 pagesMescheder Occupancy Networks Learning 3D Reconstruction in Function Space CVPR 2019 PaperQinan ZhangNo ratings yet
- Simlod: Simultaneous Lod Generation and RenderingDocument12 pagesSimlod: Simultaneous Lod Generation and RenderingcleanerhokNo ratings yet
- EdgeConnect Structure Guided Image Inpainting Using Edge PredictionDocument10 pagesEdgeConnect Structure Guided Image Inpainting Using Edge Predictiontthod37No ratings yet
- Neural Denoising For Deep Z Monte Carlo Renderings PaperDocument18 pagesNeural Denoising For Deep Z Monte Carlo Renderings Paperwvr9rpbdmnNo ratings yet
- MERF: Memory-Efficient Radiance Fields For Real-Time View Synthesis in Unbounded ScenesDocument10 pagesMERF: Memory-Efficient Radiance Fields For Real-Time View Synthesis in Unbounded ScenesVetal YeshorNo ratings yet
- Remotesensing 13 04700 v2Document21 pagesRemotesensing 13 04700 v2Elena BoneaNo ratings yet
- VoxNet A 3D Convolutional Neural Network For Real-Time Object RecognitionDocument7 pagesVoxNet A 3D Convolutional Neural Network For Real-Time Object RecognitionNyein Thu Thu AungNo ratings yet
- Vastgaussian: Vast 3D Gaussians For Large Scene ReconstructionDocument12 pagesVastgaussian: Vast 3D Gaussians For Large Scene ReconstructionthuangiovnNo ratings yet
- A Ray-Box Intersection Algorithm and Efficient Dynamic Voxel RenderingDocument17 pagesA Ray-Box Intersection Algorithm and Efficient Dynamic Voxel RenderingAnuvesh KumarNo ratings yet
- Hidden Surface Determination: Unveiling the Secrets of Computer VisionFrom EverandHidden Surface Determination: Unveiling the Secrets of Computer VisionNo ratings yet
- Fnins 14 00104Document16 pagesFnins 14 00104alexHamilNo ratings yet
- Journal of Statistical Software: Using GNU Make To Manage The Workflow of Data Analysis ProjectsDocument46 pagesJournal of Statistical Software: Using GNU Make To Manage The Workflow of Data Analysis ProjectsalexHamilNo ratings yet
- Efficient Tree Solver For Hines Matrices On The GPUDocument11 pagesEfficient Tree Solver For Hines Matrices On The GPUalexHamilNo ratings yet
- MSC Thesis Jianyu Chen 2Document50 pagesMSC Thesis Jianyu Chen 2alexHamilNo ratings yet
- Bringing Unreal Engine To The Browser Wonder Interactive Jul22Document9 pagesBringing Unreal Engine To The Browser Wonder Interactive Jul22alexHamilNo ratings yet
- Autodesk 2016Document4 pagesAutodesk 2016Elena García DelgadoNo ratings yet
- Ansa Kinematics Tool PDFDocument3 pagesAnsa Kinematics Tool PDFRavi KumarNo ratings yet
- CAD-CAM Software Comparison TableDocument3 pagesCAD-CAM Software Comparison TableMike Dixon67% (3)
- Unigraphics NX 10 HelpDocument2 pagesUnigraphics NX 10 HelpVinodh KumarNo ratings yet
- Multiview ProjectionDocument21 pagesMultiview Projectionjaderic buisingNo ratings yet
- The Application of Pro Engineer in CADCAMDocument9 pagesThe Application of Pro Engineer in CADCAMHafiezul HassanNo ratings yet
- INSTALLINFODocument3 pagesINSTALLINFOmagnamayuNo ratings yet
- 3D PrintingDocument26 pages3D Printing9986212378No ratings yet
- Nazia Ansari CV New - MDocument4 pagesNazia Ansari CV New - MNazia AnsariNo ratings yet
- Edc PDFDocument7 pagesEdc PDFKarim SamhyNo ratings yet
- Full Ebook of Finite Element Analysis For Design Engineers Second Edition Paul M Kurowski Online PDF All ChapterDocument69 pagesFull Ebook of Finite Element Analysis For Design Engineers Second Edition Paul M Kurowski Online PDF All Chapterbafirifet100% (12)
- Contenido AutodeskDocument46 pagesContenido Autodeskkalin3169899No ratings yet
- 3D Printing in Orthodontics: DR - Mohnish KumarDocument20 pages3D Printing in Orthodontics: DR - Mohnish Kumararpit maraikayarNo ratings yet
- Design and Analysis of A Tubular Space Frame Chassis For FSAE ApplicationDocument7 pagesDesign and Analysis of A Tubular Space Frame Chassis For FSAE ApplicationAjay bhosaleNo ratings yet
- Mimics Student Edition Course BookDocument83 pagesMimics Student Edition Course BookIngrid GriselNo ratings yet
- Opengl Lighting and TexturingDocument5 pagesOpengl Lighting and TexturingMohammad Mohsen AmiriNo ratings yet
- Introduction Computer Aided EngineeringDocument11 pagesIntroduction Computer Aided EngineeringnyenookeNo ratings yet
- Computer Science Bacs2173 Graphics ProgrammingDocument6 pagesComputer Science Bacs2173 Graphics ProgrammingLEE KIT KHEN KENNo ratings yet
- Instrucciones de Instalación Autodesk 2016Document4 pagesInstrucciones de Instalación Autodesk 2016Mendoza Moya MarcosNo ratings yet
- The Girolamo Amati Viola in The Galleria EstenseDocument72 pagesThe Girolamo Amati Viola in The Galleria EstenseSalvador Maura RieraNo ratings yet
- Lecture12 Texture MappingDocument22 pagesLecture12 Texture MappingnasralaNo ratings yet
- Solidworks DrawingsDocument519 pagesSolidworks Drawingsinthemoney8100% (21)
- Lista de Preços Do Produto Haas PDFDocument66 pagesLista de Preços Do Produto Haas PDFJosé CostaNo ratings yet
- Question Bank With Answers For Maya BasicDocument18 pagesQuestion Bank With Answers For Maya Basicfojibaba82% (11)
- Detailed Drawing Exercises: Solidworks EducationDocument51 pagesDetailed Drawing Exercises: Solidworks EducationMajd HusseinNo ratings yet
- Ansa Meta For CFD PresentationDocument110 pagesAnsa Meta For CFD PresentationivanNo ratings yet
- Lecture01 - CAD CAM - CAE - Introduction of The CourseDocument21 pagesLecture01 - CAD CAM - CAE - Introduction of The CourseSameer shaikhNo ratings yet
- Autodesk 2014 ProductDocument3 pagesAutodesk 2014 ProductvesnatekicNo ratings yet
- GP PracDocument22 pagesGP PracVAIBHAVI SHIVTARKARNo ratings yet
- ADocument3 pagesARenan FreitasNo ratings yet