Download as pdf or txt
You might also like
- Emm3812 - Static and Dynamic BalancingDocument7 pagesEmm3812 - Static and Dynamic Balancingsyamil100% (3)
- Modern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingFrom EverandModern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingRating: 4.5 out of 5 stars4.5/5 (9)
- Home Assignment On WaeguideDocument2 pagesHome Assignment On WaeguideTsG gHoSt oP100% (1)
- A Detailed Demonstration Lesson Plan: Rhea Tessa T. BernalDocument6 pagesA Detailed Demonstration Lesson Plan: Rhea Tessa T. BernalJeanette PradesNo ratings yet
- Balancing Fundamentals SchenckDocument15 pagesBalancing Fundamentals SchenckChoochart Thongnark0% (1)
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Oscillation and WavesDocument46 pagesOscillation and WavesRathankar Rao100% (1)
- Ae 17412 - Aerodynamics Lab - I (Manual)Document50 pagesAe 17412 - Aerodynamics Lab - I (Manual)EZHILMARANNo ratings yet
- Session No 11Document3 pagesSession No 11Mohsin EhsanNo ratings yet
- Balancing of Rotating MachinesDocument29 pagesBalancing of Rotating Machinesbudiharyatno100% (1)
- Experiment # 8: Title: ObjectiveDocument7 pagesExperiment # 8: Title: ObjectiveIbrahim BabarNo ratings yet
- EDL - Exp 03Document7 pagesEDL - Exp 03Zain Tariq Tariq MehmoodNo ratings yet
- Mom 8-11Document24 pagesMom 8-11Ibrahim BabarNo ratings yet
- MTM 4Document20 pagesMTM 4RajendrakumarNo ratings yet
- Lab Report - Static and Dynamic Balancing PDFDocument4 pagesLab Report - Static and Dynamic Balancing PDFAltaf100% (3)
- Balancing: Me 361 Dynamics of MachineryDocument22 pagesBalancing: Me 361 Dynamics of Machinerypjrfhn7596No ratings yet
- Balancing Without Phase ReadingDocument2 pagesBalancing Without Phase Readingvirtual_56No ratings yet
- Field Balancing TipsDocument3 pagesField Balancing TipsD FallowNo ratings yet
- Unit-Ii Static & Dynamic BalancingDocument128 pagesUnit-Ii Static & Dynamic BalancingSaranNo ratings yet
- Technology - : MechanismsDocument10 pagesTechnology - : MechanismstalhaNo ratings yet
- Advanced Inertia CalculationsDocument6 pagesAdvanced Inertia Calculationsjingyong123No ratings yet
- MOM Lab ReportsDocument17 pagesMOM Lab Reportsfarhan ansarNo ratings yet
- Experiment No 6: To Perform The Torsion Test and Determine The Modulus of Resilience of A Given SpecimenDocument8 pagesExperiment No 6: To Perform The Torsion Test and Determine The Modulus of Resilience of A Given SpecimenKhurram SattarNo ratings yet
- Mechanical Vibration Ch-6Document34 pagesMechanical Vibration Ch-6Befikad BekeleNo ratings yet
- Engg DynamicsDocument26 pagesEngg DynamicssadiaNo ratings yet
- Lab 10Document4 pagesLab 10Collective StudiesNo ratings yet
- TOM-II Lab ManualDocument41 pagesTOM-II Lab ManualAli UsmanNo ratings yet
- Training Program On: Vibration Monitoring, Alignment and Balancing Triveni Reliability Services and Training AcademyDocument77 pagesTraining Program On: Vibration Monitoring, Alignment and Balancing Triveni Reliability Services and Training AcademyMithlesh SharmaNo ratings yet
- Rotor Balancing: HG 4 (Chapter 8)Document30 pagesRotor Balancing: HG 4 (Chapter 8)Robby DwitamaNo ratings yet
- Balancing CONCLUSIONDocument2 pagesBalancing CONCLUSIONSyahdi Rosli100% (1)
- Acoples TramecDocument26 pagesAcoples TramecAndres ValderramaNo ratings yet
- 4TH Sem - Tom & Measurement Lab ManualDocument22 pages4TH Sem - Tom & Measurement Lab Manualag358191No ratings yet
- New Moment Weight PDFDocument17 pagesNew Moment Weight PDFAchmad Arifudin HidayatullohNo ratings yet
- Basics of Turbomachinery BalanceDocument14 pagesBasics of Turbomachinery BalanceSuthan RNo ratings yet
- 1 - DJJ6153 Topic 3Document25 pages1 - DJJ6153 Topic 3Kroof KayNo ratings yet
- Reciprocating Mass & Gyroscope (Theory)Document4 pagesReciprocating Mass & Gyroscope (Theory)Anonymous 0Frw5LxNo ratings yet
- Mechanics of Machines: Lab ReportDocument52 pagesMechanics of Machines: Lab ReportMuhammad AbdullahNo ratings yet
- Balancing of Rotating Masses-FinalDocument4 pagesBalancing of Rotating Masses-FinalkasunNo ratings yet
- Experiment To Determine The Mechanical Advantage, Velocity Ratio and Mechanical Efficiency of Worm and Worm-Wheel Gear.Document8 pagesExperiment To Determine The Mechanical Advantage, Velocity Ratio and Mechanical Efficiency of Worm and Worm-Wheel Gear.Taha Anees100% (1)
- Introduction To BalancingDocument16 pagesIntroduction To BalancingNguyễn Thanh SơnNo ratings yet
- Chapter 3 - Machine Tool DrivesDocument112 pagesChapter 3 - Machine Tool Drivesaman muleNo ratings yet
- 250 14-1 Experiment 14 Torsion Constant of A RodDocument3 pages250 14-1 Experiment 14 Torsion Constant of A RodARSLANNo ratings yet
- Unit 6 Clutches, BrakesDocument61 pagesUnit 6 Clutches, BrakesSumit KumarNo ratings yet
- Edl 47Document36 pagesEdl 47sadiaNo ratings yet
- Dynamic Balancing ExpDocument10 pagesDynamic Balancing ExpSand Man Out100% (1)
- Balancing 2013 Pumps ValvesDocument5 pagesBalancing 2013 Pumps ValvesSrinivasa Rao SNo ratings yet
- Experiment:04 Cam Jump Analysis: Kinematics and Dynamics Lab Manual (ME406ES)Document15 pagesExperiment:04 Cam Jump Analysis: Kinematics and Dynamics Lab Manual (ME406ES)Akshay PolasNo ratings yet
- Balancing of Rotating Masses-FinalDocument5 pagesBalancing of Rotating Masses-FinalKasun WijethungaNo ratings yet
- 2019 Me 127Document48 pages2019 Me 127Zeeshan AliNo ratings yet
- Lecture#2-Load Cells and Force Measurement - 081155Document13 pagesLecture#2-Load Cells and Force Measurement - 081155kamelkareem636No ratings yet
- Experiment 9 Moment of Inertia: Translational Kinetic Energy of The Driving Mass and The Rotational Kinetic Energy of TheDocument4 pagesExperiment 9 Moment of Inertia: Translational Kinetic Energy of The Driving Mass and The Rotational Kinetic Energy of Themuhammad faizal akbarNo ratings yet
- New Moment WeightDocument16 pagesNew Moment WeightRaj KiranNo ratings yet
- Gnitc/Set/Dme Kinematics&Dynamics LabDocument32 pagesGnitc/Set/Dme Kinematics&Dynamics LabdivyanshNo ratings yet
- Lab Manual 3151911 DOMDocument34 pagesLab Manual 3151911 DOMbssp2709No ratings yet
- Sad Mom 9Document24 pagesSad Mom 9sakhawathossanrobelNo ratings yet
- Clutches Brakes and DynamometersDocument62 pagesClutches Brakes and DynamometersIrfan Shaikh50% (2)
- Mechanical Reasoning ReviewDocument7 pagesMechanical Reasoning Reviewking gh100% (3)
- Lab ReportDocument3 pagesLab ReportMuhammad Abdullah Zafar GhauriNo ratings yet
- A Book of Helpful Tips on Overhauling a Vintage Engine - Including Car, Motorbike and Lawn Mower EnginesFrom EverandA Book of Helpful Tips on Overhauling a Vintage Engine - Including Car, Motorbike and Lawn Mower EnginesRating: 5 out of 5 stars5/5 (1)
- Watch Repairing, Cleaning and Adjusting - A Practical HandbookFrom EverandWatch Repairing, Cleaning and Adjusting - A Practical HandbookNo ratings yet
- Band Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsFrom EverandBand Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsRating: 5 out of 5 stars5/5 (1)
- The Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementFrom EverandThe Book of the Singer Junior - Written by an Owner-Driver for Owners and Prospective Owners of the Car - Including the 1931 SupplementNo ratings yet
- Bearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsFrom EverandBearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsRating: 4 out of 5 stars4/5 (1)
- Session No 11Document3 pagesSession No 11Mohsin EhsanNo ratings yet
- Session No 05Document4 pagesSession No 05Mohsin EhsanNo ratings yet
- Session No 04Document3 pagesSession No 04Mohsin EhsanNo ratings yet
- Session No 01Document5 pagesSession No 01Mohsin EhsanNo ratings yet
- Session No 05Document4 pagesSession No 05Mohsin EhsanNo ratings yet
- Session No 02Document5 pagesSession No 02Mohsin EhsanNo ratings yet
- Session No 03Document3 pagesSession No 03Mohsin EhsanNo ratings yet
- Muhammad Mohsin Ehsan: Open Ended LabDocument4 pagesMuhammad Mohsin Ehsan: Open Ended LabMohsin EhsanNo ratings yet
- Muhammad Mohsin Ehsan: Open Ended LabDocument4 pagesMuhammad Mohsin Ehsan: Open Ended LabMohsin EhsanNo ratings yet
- Test A: Two-Dimensional Motion and VectorsDocument9 pagesTest A: Two-Dimensional Motion and VectorsAref DahabrahNo ratings yet
- Rectilinear KinematicDocument11 pagesRectilinear KinematicAyyub FakhruddinNo ratings yet
- One Dimensional FlowDocument11 pagesOne Dimensional FlowmechgokulNo ratings yet
- 11 RadionavigationDocument444 pages11 RadionavigationGori Conejero96% (24)
- Chapter 2. Kinematics in One DimensionDocument74 pagesChapter 2. Kinematics in One DimensionMaggie WestbrookNo ratings yet
- PHYSICS 12th Sci Prelim Question PaperDocument4 pagesPHYSICS 12th Sci Prelim Question PaperAditya Deshmukh0% (1)
- 3GPP - TR38901 - Table 7.4.1-1 - Pathloss-ModelsDocument2 pages3GPP - TR38901 - Table 7.4.1-1 - Pathloss-ModelsAilton OliveiraNo ratings yet
- Ae 2301 - Flight Dynamics V Sem Question Bank Part ADocument3 pagesAe 2301 - Flight Dynamics V Sem Question Bank Part ASaravanan AtthiappanNo ratings yet
- Experiment 13Document5 pagesExperiment 13devoydouglasNo ratings yet
- Chapter 6 Terminal BallisticDocument7 pagesChapter 6 Terminal BallisticGabriel Sta MariaNo ratings yet
- The Awesome Life Force 1984Document8 pagesThe Awesome Life Force 1984Roman PetersonNo ratings yet
- Application of Bernoulli's TheoremDocument8 pagesApplication of Bernoulli's Theoremram kumarNo ratings yet
- MechanicsDocument6 pagesMechanicsHarold Lee BolingetNo ratings yet
- FM 3e SI Chap11 LectureDocument71 pagesFM 3e SI Chap11 LecturemohdrashdansaadNo ratings yet
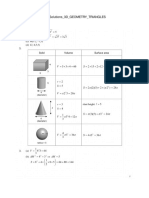
- Solutions 3D GEOMETRY TRIANGLESDocument15 pagesSolutions 3D GEOMETRY TRIANGLESAna Clara Maria Ramirez FleumerNo ratings yet
- Projectile MotionDocument18 pagesProjectile MotionMcubedd StemNo ratings yet
- Forces and NL Practice TestDocument8 pagesForces and NL Practice TestCASIÑO SHANE VAST ANDREINo ratings yet
- GenPhy Mod 5Document26 pagesGenPhy Mod 5Reyzel Anne Faylogna100% (1)
- Ultrasonic Testing Ut Q Bank A-3Document9 pagesUltrasonic Testing Ut Q Bank A-3kingstonNo ratings yet
- Astrodynamics TudelftDocument42 pagesAstrodynamics TudelftMiguel CallejónNo ratings yet
- Class 11 Physics em MQP 2018 With AnswersDocument32 pagesClass 11 Physics em MQP 2018 With AnswersmontgoatNo ratings yet
- Selected Topics of Dynamics: Dr.-Ing. Azmi Mohamed Yusof Faculty of Mechanical EngineeringDocument94 pagesSelected Topics of Dynamics: Dr.-Ing. Azmi Mohamed Yusof Faculty of Mechanical EngineeringAiman HaiqalNo ratings yet
- Schaum S Outline of Mechanical VibrationsDocument1 pageSchaum S Outline of Mechanical VibrationsLetty VianaNo ratings yet
- Final 9Document3 pagesFinal 9Debela mendaraNo ratings yet
- Q J Mechanics Appl Math 1958 WATSON 302 25Document24 pagesQ J Mechanics Appl Math 1958 WATSON 302 25王龙No ratings yet
- Chapter 17Document6 pagesChapter 17Diego ValderramaNo ratings yet