Download as pdf or txt
You might also like
- EDF6222 Discussion Post 1Document2 pagesEDF6222 Discussion Post 1Erica LevyNo ratings yet
- SSP 512 Automated 5 Speed Manual Gearbox 0CTDocument36 pagesSSP 512 Automated 5 Speed Manual Gearbox 0CTossoski100% (3)
- GP 30 85 Fire and Gas DetectionDocument45 pagesGP 30 85 Fire and Gas Detectionsgh135586% (7)
- Computer Network AnswersDocument4 pagesComputer Network Answersammad ahmadNo ratings yet
- Aluminium Alloy AMS 4050 T7451 Plate 223Document2 pagesAluminium Alloy AMS 4050 T7451 Plate 223raoz810% (1)
- Fahad 2019Document5 pagesFahad 2019Blmjdb AbdelhafidNo ratings yet
- Unbalance, Flicker, Harmonic, Voltage and Reactive Power Compensation of The Distribution Grid Using A Universal STATOMDocument6 pagesUnbalance, Flicker, Harmonic, Voltage and Reactive Power Compensation of The Distribution Grid Using A Universal STATOMAhmed WestministerNo ratings yet
- A Control Strategy For Unified Power Quality Conditioner: Luis F.C. Monteiro, Mauricio Aredes, J o B A. Moor Net0Document6 pagesA Control Strategy For Unified Power Quality Conditioner: Luis F.C. Monteiro, Mauricio Aredes, J o B A. Moor Net0Saifullah Khalid100% (1)
- Newton Raphson MethodDocument30 pagesNewton Raphson MethodDinesh Kumar100% (1)
- Active Damping of Oscillations in LC-filter For Line Connected, Current Controlled, PWM Voltage Source ConvertersDocument10 pagesActive Damping of Oscillations in LC-filter For Line Connected, Current Controlled, PWM Voltage Source ConvertersAymane FahmiNo ratings yet
- Control Structures of Power Electronics For DPGSDocument23 pagesControl Structures of Power Electronics For DPGSAnna Maria BanicaNo ratings yet
- Three-Phase Voltage Regulator Modeling For Forward/ Backward Sweep-Based Distribution Systems Power Flow AlgorithmsDocument5 pagesThree-Phase Voltage Regulator Modeling For Forward/ Backward Sweep-Based Distribution Systems Power Flow AlgorithmsFerry OpilOpNo ratings yet
- Self-Tuning Fuzzy PI Dc-Bus Voltage Controller and Fuzzy Switching Sequences Selection For Direct Power Control of PWM AC/DC ConverterDocument6 pagesSelf-Tuning Fuzzy PI Dc-Bus Voltage Controller and Fuzzy Switching Sequences Selection For Direct Power Control of PWM AC/DC ConverterZikra ElninoNo ratings yet
- Chithra ConferenceDocument6 pagesChithra Conferencem.rathi meenaNo ratings yet
- Sandeep 2014Document6 pagesSandeep 2014Gourab SahaNo ratings yet
- Optimal Capacitor Placement Voltage Stability and System SecurityDocument7 pagesOptimal Capacitor Placement Voltage Stability and System SecurityTareq AzizNo ratings yet
- STATCOM Control Reconfiguration Technique For Steady State and Dynamic Performance Optimization During Network Fault ConditionsDocument6 pagesSTATCOM Control Reconfiguration Technique For Steady State and Dynamic Performance Optimization During Network Fault Conditionsd ganeshNo ratings yet
- Maximum Power Point Tracking Incremental ConductanceDocument16 pagesMaximum Power Point Tracking Incremental ConductanceEsther oppong AgyeiNo ratings yet
- Commissioning Generator AVR, PSS and Model Validation: Wenyan Gu, Member, IEEEDocument5 pagesCommissioning Generator AVR, PSS and Model Validation: Wenyan Gu, Member, IEEEProject MentorNo ratings yet
- Simulation of Upqc FileDocument11 pagesSimulation of Upqc FiledineshprocksNo ratings yet
- Performance and Simulation Between Conventional and Improve P&O MPPTDocument4 pagesPerformance and Simulation Between Conventional and Improve P&O MPPTTito Bambang PriambodoNo ratings yet
- Novel Control Strategy For Single-Phase Single-Stage Photovoltaic Converter Using MPPT AlgorithmDocument6 pagesNovel Control Strategy For Single-Phase Single-Stage Photovoltaic Converter Using MPPT Algorithmchandu_chowdary_2No ratings yet
- Determination of Optimal Location of Upfc Controller Devices in Electric Transmission System by Using Pso MethodDocument8 pagesDetermination of Optimal Location of Upfc Controller Devices in Electric Transmission System by Using Pso MethodIOSRjournalNo ratings yet
- UPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourDocument8 pagesUPFC Control Based On New IP Type Controller: Mojtaba Shirvani, Babak Keyvani, Mostafa Abdollahi and Ahmad MemaripourMmillion AlemayehuNo ratings yet
- 2015 Pitch-Controlled (1) IEEE PDFDocument6 pages2015 Pitch-Controlled (1) IEEE PDFShah MimNo ratings yet
- Compensators For The Buck Converter: Design and AnalysisDocument25 pagesCompensators For The Buck Converter: Design and AnalysisÖzgür YılmazNo ratings yet
- A Study On Adaptive Load Torque Observer For Robust Precision Position Control of MotorDocument6 pagesA Study On Adaptive Load Torque Observer For Robust Precision Position Control of MotorwaweeNo ratings yet
- Applying To Control Overcurrents at Unbalanced Faults of Forced-Commutated Vscs Used As Static Var CompensatorsDocument6 pagesApplying To Control Overcurrents at Unbalanced Faults of Forced-Commutated Vscs Used As Static Var CompensatorsJULFANRI SIRAITNo ratings yet
- Voltage Profile Improvement Using Static 48a88afcDocument5 pagesVoltage Profile Improvement Using Static 48a88afcharini shivNo ratings yet
- 5 106-6 PDFDocument6 pages5 106-6 PDFCeh DjamelNo ratings yet
- Load Flow StudiesDocument30 pagesLoad Flow StudiesMary Morse100% (2)
- 95 Development of The Non Ideal Op Amp EquationsDocument12 pages95 Development of The Non Ideal Op Amp EquationsJohnny DoeNo ratings yet
- 07 - AST - Analisis Aliran Daya - Ver.00Document53 pages07 - AST - Analisis Aliran Daya - Ver.00Egan HuluNo ratings yet
- Unity Power FactorDocument6 pagesUnity Power FactorReshmi Parikal RaghavanNo ratings yet
- Adjustable Matched Virtual: Photovoltaic PointDocument5 pagesAdjustable Matched Virtual: Photovoltaic PointChenchu TnvNo ratings yet
- Nachiappan 2012Document6 pagesNachiappan 201220131D5201 ALAMANDA BHARGAVANo ratings yet
- Comparative Study and Performance Analysis of PSO, ABC, BFO and Cuckoo Search Optimization Techniques On UPFC Device For Voltage Stability Margin ImprovementDocument19 pagesComparative Study and Performance Analysis of PSO, ABC, BFO and Cuckoo Search Optimization Techniques On UPFC Device For Voltage Stability Margin ImprovementInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDocument13 pagesLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarNo ratings yet
- Grid ConverterDocument6 pagesGrid Converter「 haxon 」No ratings yet
- DRPCDocument7 pagesDRPCSelvaraj JohnNo ratings yet
- 3 HVDocument6 pages3 HVSparsh AgarwalNo ratings yet
- Evaluation of IEEE 57 Bus System For Optimal Power Flow AnalysisDocument5 pagesEvaluation of IEEE 57 Bus System For Optimal Power Flow AnalysisAnkur MaheshwariNo ratings yet
- Overcurrent Relay Coordination For Phase and Earth Foults Using EtapDocument4 pagesOvercurrent Relay Coordination For Phase and Earth Foults Using EtapHimdad TahirNo ratings yet
- CP 2016 1311Document8 pagesCP 2016 1311Asad HameedNo ratings yet
- Cep PeDocument25 pagesCep PeJaveriaNo ratings yet
- Performance Enhancement of Shunt Active Power Filter Application Using Adaptive Neural NetworkDocument8 pagesPerformance Enhancement of Shunt Active Power Filter Application Using Adaptive Neural NetworkkaoutarNo ratings yet
- Direct Power Control of PWM Converter Without Power Source VoltaDocument6 pagesDirect Power Control of PWM Converter Without Power Source Voltabalaji mendiNo ratings yet
- Hystersis ControlDocument6 pagesHystersis ControlraghuaadsNo ratings yet
- Power Quality Improvement in Grid Connected Wind Energy SystemDocument21 pagesPower Quality Improvement in Grid Connected Wind Energy SystemdeepikaNo ratings yet
- Elimination of Harmonics Using Active Power Filter Based On DQ Reference Frame TheoryDocument5 pagesElimination of Harmonics Using Active Power Filter Based On DQ Reference Frame TheoryseventhsensegroupNo ratings yet
- A Novel High-Power Low-Distortion Synchronous Link Converter-Based Load Compensator Without The Requirement of Var CalculatorDocument7 pagesA Novel High-Power Low-Distortion Synchronous Link Converter-Based Load Compensator Without The Requirement of Var CalculatorSiddharth SinghNo ratings yet
- Unified Power Quality Conditioner in A Grid Connected Photovoltaic SystemDocument11 pagesUnified Power Quality Conditioner in A Grid Connected Photovoltaic SystemPaolo ProspNo ratings yet
- Analysis of Predictive Control For Active Power Factor CorrectioDocument6 pagesAnalysis of Predictive Control For Active Power Factor Correctioezloy80No ratings yet
- Proportional Resonant Controller (PR)Document3 pagesProportional Resonant Controller (PR)meenaNo ratings yet
- Backstepping Controller Design To Track Maximum Power in Photovoltaic SystemsDocument10 pagesBackstepping Controller Design To Track Maximum Power in Photovoltaic SystemsalgNo ratings yet
- Comparison of Current Control Techniques For Single-Phase Voltage-Source PWM RectifiersDocument4 pagesComparison of Current Control Techniques For Single-Phase Voltage-Source PWM RectifiersIbrahim MunirNo ratings yet
- DSP Control of Power Conditioner For Improving Power QualityDocument6 pagesDSP Control of Power Conditioner For Improving Power Qualityapi-3826450No ratings yet
- Ieee 1995: Systems, Vol. 10Document11 pagesIeee 1995: Systems, Vol. 10Fernando de la CruzNo ratings yet
- A Study On Autonomous Distributed Control and Grid Accident Robust Control Technique For Energy Router in Distributed Generation Linked ClustersDocument6 pagesA Study On Autonomous Distributed Control and Grid Accident Robust Control Technique For Energy Router in Distributed Generation Linked ClustersKhoa NguyễnNo ratings yet
- Fractional-Order Model Reference Adaptive Controller Design Using A Modified MIT Rule and A Feed-Forward ActionDocument6 pagesFractional-Order Model Reference Adaptive Controller Design Using A Modified MIT Rule and A Feed-Forward ActionVishal PusadkarNo ratings yet
- Ps and HV Lab-JaiDocument3 pagesPs and HV Lab-JaiWill MNo ratings yet
- A Grid-Connected PV System With Power Quality Improvement Based On Boost + Dual-Level Four-Leg InverterDocument5 pagesA Grid-Connected PV System With Power Quality Improvement Based On Boost + Dual-Level Four-Leg InverterAhmed RefaatNo ratings yet
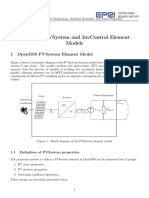
- Opendss Pvsystem and Invcontrol Element ModelsDocument30 pagesOpendss Pvsystem and Invcontrol Element ModelsTerrorTricolorFCNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 1 s2.0 S0009250910000333 MainDocument10 pages1 s2.0 S0009250910000333 MainLyes AbbassenNo ratings yet
- 1 s2.0 0029549393900439 MainDocument17 pages1 s2.0 0029549393900439 MainLyes AbbassenNo ratings yet
- Software (In) Security - Fun With C - Signed Integer Boundary ConditionsDocument3 pagesSoftware (In) Security - Fun With C - Signed Integer Boundary ConditionsLyes AbbassenNo ratings yet
- Control Devices Using Python and NodeMCU Over Internet (Tutorial-9) - Embedded LaboratoryDocument9 pagesControl Devices Using Python and NodeMCU Over Internet (Tutorial-9) - Embedded LaboratoryLyes AbbassenNo ratings yet
- Get Temperature & Humidity Data On PC Using Python - NodeMCU (Tutorial-7) - Embedded LaboratoryDocument7 pagesGet Temperature & Humidity Data On PC Using Python - NodeMCU (Tutorial-7) - Embedded LaboratoryLyes AbbassenNo ratings yet
- Report Introduction and Nursing With Maternity Premature Rupture of MembranesDocument13 pagesReport Introduction and Nursing With Maternity Premature Rupture of MembranessyaifulNo ratings yet
- Spiritual DiscernmentDocument16 pagesSpiritual DiscernmentRavi KumarNo ratings yet
- Akritas Probability & Statistics With R For Engineers and ScientistsDocument256 pagesAkritas Probability & Statistics With R For Engineers and Scientistschristian neme schulNo ratings yet
- Lesson 3: 7 English ONEDocument3 pagesLesson 3: 7 English ONEJasminConejero100% (2)
- Quantum Phase Transitions: Alexander DanielsDocument12 pagesQuantum Phase Transitions: Alexander Danielsapi-288833495No ratings yet
- Active Wheels/ Hub Motors Ashwin Thottumkara FullDocument18 pagesActive Wheels/ Hub Motors Ashwin Thottumkara FullASHWIN THOTTUMKARANo ratings yet
- FIP Statement of Professional Standards (Code of Ethics)Document4 pagesFIP Statement of Professional Standards (Code of Ethics)Cesly Jewel Acosta AvilesNo ratings yet
- One Word SubstitutionDocument52 pagesOne Word SubstitutionDeep Raj JangidNo ratings yet
- HTML Codes Foa WebsiteDocument180 pagesHTML Codes Foa WebsitePappu YadavNo ratings yet
- Awakening in Silence PDFDocument21 pagesAwakening in Silence PDFberlinczykNo ratings yet
- Adjustable Precision Shunt Regulators Az431Document20 pagesAdjustable Precision Shunt Regulators Az431Jesús M. Marcano C.No ratings yet
- Review Sheet For Math Midterm Exam Revised 1Document34 pagesReview Sheet For Math Midterm Exam Revised 1api-294158678No ratings yet
- Answer Answer Any Two Full Questions, Each Carries 15 Marks MarksDocument3 pagesAnswer Answer Any Two Full Questions, Each Carries 15 Marks MarksanuNo ratings yet
- Educational Planning:: DefinitionDocument3 pagesEducational Planning:: DefinitionBasit AliNo ratings yet
- SP-1246 Part-1Document31 pagesSP-1246 Part-1Rajkumar ANo ratings yet
- It 101 - Chapter 2Document14 pagesIt 101 - Chapter 2Cristelle EbolNo ratings yet
- Hot-Film Air Mass MeterDocument1 pageHot-Film Air Mass MeterOliver AlfaroNo ratings yet
- Unemployment (Multiple Choice Questions)Document16 pagesUnemployment (Multiple Choice Questions)NickNo ratings yet
- Digital Clock Circuit Using 8051 Microcontroller and DS12C887Document14 pagesDigital Clock Circuit Using 8051 Microcontroller and DS12C887Bhargav BhargavNo ratings yet
- Study Qs 1Document2 pagesStudy Qs 1Aditya RaoNo ratings yet
- Top Business Books of All TimeDocument5 pagesTop Business Books of All Timechandel08No ratings yet
- Health Management in The Oil and Gas IndustryDocument44 pagesHealth Management in The Oil and Gas IndustryClaudia TiradoNo ratings yet
- Tech Talk - Ivanti Endpoint Manager 2021Document64 pagesTech Talk - Ivanti Endpoint Manager 2021Mathieu LEROYNo ratings yet
- Feminism NotesDocument89 pagesFeminism NotesTanya Chopra100% (1)
- 2 Cell Box CulvertDocument22 pages2 Cell Box Culvertabhijeet sahuNo ratings yet