Download as pdf or txt
You might also like
- GCMS Reference Manual 28 May 2015Document445 pagesGCMS Reference Manual 28 May 2015Bom100% (2)
- Af502 PDFDocument65 pagesAf502 PDFhoang dungNo ratings yet
- MergedDocument34 pagesMergedmahamaniNo ratings yet
- Control SystemDocument27 pagesControl SystemMookambigai CollegeNo ratings yet
- Velammal Engineering College, Chennai-600066 Electronics and Communication Engineering Ut I Question Bank Unit I Part ADocument3 pagesVelammal Engineering College, Chennai-600066 Electronics and Communication Engineering Ut I Question Bank Unit I Part Asubramanian subramanianNo ratings yet
- CS Mod1 QBDocument10 pagesCS Mod1 QBthenithyanagrajNo ratings yet
- Ic8451 CS Unit I Part BDocument21 pagesIc8451 CS Unit I Part BMohammed Ovaiz0% (1)
- Control System Unit 1 Question BankDocument2 pagesControl System Unit 1 Question BankAnish John Paul MNo ratings yet
- 21EE3101 CS - Practice Questions CO 1Document3 pages21EE3101 CS - Practice Questions CO 1mohansaikrnaNo ratings yet
- CS 2255 Control Systems Question BankDocument62 pagesCS 2255 Control Systems Question BankreporterrajiniNo ratings yet
- EC8391 Control Systems Engineering UNIT IDocument8 pagesEC8391 Control Systems Engineering UNIT IxperiaashNo ratings yet
- Linear Control Engineering QBDocument11 pagesLinear Control Engineering QBAkizuki TakaoNo ratings yet
- Assignment 2 MSDDocument3 pagesAssignment 2 MSDHemkeshNo ratings yet
- Lecture 7 - Simulation of Physical SystemsDocument33 pagesLecture 7 - Simulation of Physical SystemsanthonyNo ratings yet
- EC2255 Control Systems QBDocument16 pagesEC2255 Control Systems QBjenath1No ratings yet
- Control Systems EngineeringDocument16 pagesControl Systems Engineeringapi-19951707No ratings yet
- Mechanical System and Simmechanics SimulationDocument5 pagesMechanical System and Simmechanics SimulationIcarus CanNo ratings yet
- Power System Dynamics Question PaperDocument3 pagesPower System Dynamics Question PapervpzfarisNo ratings yet
- Ec6405 IV SemDocument10 pagesEc6405 IV SemKaruppu SamyNo ratings yet
- Report Adaptive Bus SuspensionDocument10 pagesReport Adaptive Bus SuspensionAhmad Zikry AfiqNo ratings yet
- Control System Engineering EC6405 Unit I-Cont Rol Syste M Mod Elin G Part ADocument12 pagesControl System Engineering EC6405 Unit I-Cont Rol Syste M Mod Elin G Part ASivaprakasam KarthikeyanNo ratings yet
- Universiti Teknologi Mara: K K D J S S J R K S E SDocument4 pagesUniversiti Teknologi Mara: K K D J S S J R K S E SKain KapanNo ratings yet
- EE8391 CSE IAT1 QB IIIyearDocument7 pagesEE8391 CSE IAT1 QB IIIyearOhmsakthi Vel RNo ratings yet
- Control SystemDocument21 pagesControl SystemGAkumari0% (1)
- Me2255 Electronics and MicroprocDocument2 pagesMe2255 Electronics and MicroprocBalaji PalanisamyNo ratings yet
- Sankalchand Patel UniversityDocument2 pagesSankalchand Patel UniversityDivyNo ratings yet
- Disturbance Observer Based Current Controller For A Brushed DC MotorDocument6 pagesDisturbance Observer Based Current Controller For A Brushed DC MotorAji Brahma NugrohoNo ratings yet
- Control Systems Year: Ii Time: 1.30 Hrs Marks: 50Document4 pagesControl Systems Year: Ii Time: 1.30 Hrs Marks: 50guru.rjpmNo ratings yet
- UNIT 1 (3marks)Document3 pagesUNIT 1 (3marks)Anvesh MagantiNo ratings yet
- 2015 - CIVL3235 - AssignmentDocument4 pages2015 - CIVL3235 - AssignmentDuongPhamNo ratings yet
- Modelling and Simulation of A DC Motor DriveDocument12 pagesModelling and Simulation of A DC Motor DriveMi HoangNo ratings yet
- Antenna AzimuthDocument3 pagesAntenna AzimuthAnonymous PyFkX4jYVWNo ratings yet
- Modelling of The Three-Phase Induction Motor Using SIMULINKDocument3 pagesModelling of The Three-Phase Induction Motor Using SIMULINKsajs20175% (4)
- Svcet: B.E"/B.Tech. Degree Examination, November/December 2005Document3 pagesSvcet: B.E"/B.Tech. Degree Examination, November/December 2005lllllllllllNo ratings yet
- Full Order Observer Controller Design For DC Motor Based On State Space ApproachDocument5 pagesFull Order Observer Controller Design For DC Motor Based On State Space ApproachSelaRajNo ratings yet
- PSOC Model II - Set3Document2 pagesPSOC Model II - Set3Vidhya Priya SenthilNo ratings yet
- Control Systems Question Paper PDFDocument2 pagesControl Systems Question Paper PDFsivaeinfoNo ratings yet
- Simulink Platform. The Circuit Equations Can Be Written As FollowsDocument3 pagesSimulink Platform. The Circuit Equations Can Be Written As FollowsNazmul islamNo ratings yet
- PSOC Model II - Set2Document2 pagesPSOC Model II - Set2Vidhya Priya SenthilNo ratings yet
- M3.VLAB5 Simulink G10Document7 pagesM3.VLAB5 Simulink G10Jotham MorciloNo ratings yet
- Ec8391-Control Systems Engineering-947551245-Cse QBDocument18 pagesEc8391-Control Systems Engineering-947551245-Cse QBMr. V. Buvanesh Pandian EIE-2019-A SEC BATCHNo ratings yet
- Roever College of Engineering & TechnologyDocument1 pageRoever College of Engineering & TechnologyanbuelectricalNo ratings yet
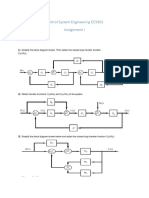
- Control System Engineering EC3301 Assignment I: Practice Following ProblemsDocument2 pagesControl System Engineering EC3301 Assignment I: Practice Following ProblemsAparajita PanigrahiNo ratings yet
- Worksheet 1Document3 pagesWorksheet 1million shiferawNo ratings yet
- Robust Control Design For Maglev Train With Parametric Uncertainties Using - SynthesisDocument7 pagesRobust Control Design For Maglev Train With Parametric Uncertainties Using - SynthesisRaj PurohitNo ratings yet
- MEC522: Control Engineering PBL AssignmentDocument3 pagesMEC522: Control Engineering PBL Assignmentanisalyaa100% (1)
- ELEC 4170 1 Diode Rectifiers Fall 2022Document14 pagesELEC 4170 1 Diode Rectifiers Fall 2022Tafheem AlphaNo ratings yet
- MATLAB Speed Control DC MotorDocument4 pagesMATLAB Speed Control DC MotorEngineering and Scientific International JournalNo ratings yet
- DC Machine SimulationDocument12 pagesDC Machine Simulationkiranch219No ratings yet
- EC8391 - Control Systems EngineeringDocument3 pagesEC8391 - Control Systems Engineeringsyed1188No ratings yet
- Eccentric Mass Dynamic Vibration Absorber - Vibrations - 2131Document4 pagesEccentric Mass Dynamic Vibration Absorber - Vibrations - 2131southertontimothy100% (4)
- IC6501-Control Systems EngineeringDocument16 pagesIC6501-Control Systems EngineeringrameshsmeNo ratings yet
- Application of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965Document6 pagesApplication of The Dq0 Transformation in The 3 Phase Grid Connected PV Systems With Active and Reactive Power Control 04746965new7677100% (1)
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- Beee QB Be3251Document8 pagesBeee QB Be3251SRINIVASAN.K.G MECW-AP/EEENo ratings yet
- Modeling and Simulation of The DC Motor Using Matlab and LabviewDocument6 pagesModeling and Simulation of The DC Motor Using Matlab and LabviewnghiepmechanNo ratings yet
- V Semester E&E (A, B & C Sections) Linear Control Theory: Assignment - I (19-08-2016)Document2 pagesV Semester E&E (A, B & C Sections) Linear Control Theory: Assignment - I (19-08-2016)deepanshuNo ratings yet
- Mechanical Systems Modeling For Electric DrivesDocument2 pagesMechanical Systems Modeling For Electric DrivesDamilola JacobNo ratings yet
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsFrom EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Marketing Management - I: In-Depth Comparative Analysis of Marketing Strategies Followed byDocument7 pagesMarketing Management - I: In-Depth Comparative Analysis of Marketing Strategies Followed byPrakash GotiNo ratings yet
- C4+ Maintenance ManualDocument28 pagesC4+ Maintenance Manualnorizam77100% (1)
- Industrial Training ReportDocument13 pagesIndustrial Training ReportBharathwaj SK0% (2)
- Department of Information Technology: Question Bank TE IT AY-22-23 Sem VI Module 04: Clustering & Outlier AnalysisDocument4 pagesDepartment of Information Technology: Question Bank TE IT AY-22-23 Sem VI Module 04: Clustering & Outlier AnalysisAnurag SinghNo ratings yet
- ABLE Contract Approval.Document5 pagesABLE Contract Approval.Ferris FerrisNo ratings yet
- Security Container Information Container Number Instructions CombinationDocument1 pageSecurity Container Information Container Number Instructions CombinationDoctor MotrinNo ratings yet
- AerosolsDocument29 pagesAerosolsKulbhushan SharmaNo ratings yet
- Broadcast Video Media Producer in Austin Dallas TX Resume Glen ChurchwellDocument2 pagesBroadcast Video Media Producer in Austin Dallas TX Resume Glen ChurchwellGlenChurchwellNo ratings yet
- VALIX - Chapter 5Document28 pagesVALIX - Chapter 5glenn langcuyan100% (1)
- 02 - Property Tables and ChartsDocument2 pages02 - Property Tables and ChartsjhamilcarNo ratings yet
- Part 1 - Clinical Manual - January 2018 - Version 8.0Document260 pagesPart 1 - Clinical Manual - January 2018 - Version 8.0AbhishekNo ratings yet
- Types of BusinessDocument17 pagesTypes of BusinessDonald SelmartinNo ratings yet
- Asphalt Material Presentation Group 4Document27 pagesAsphalt Material Presentation Group 4El Barack MaulanaNo ratings yet
- Accounting Information SystemsDocument11 pagesAccounting Information SystemsMohamed ZakyNo ratings yet
- The Accounting Cycle: Financial StatementDocument36 pagesThe Accounting Cycle: Financial StatementKhairunnisa Abd WahabNo ratings yet
- Crankshaft Alignment MeasurementDocument1 pageCrankshaft Alignment MeasurementmohamedNo ratings yet
- Pnge - 5Document43 pagesPnge - 5Eng.yasser alahdalNo ratings yet
- Windows and Networking Basic Questions and AnswerDocument14 pagesWindows and Networking Basic Questions and AnswerCinema HungerNo ratings yet
- React JS: Notes For ProfessionalsDocument110 pagesReact JS: Notes For ProfessionalsudNo ratings yet
- Manual de Usuario Ph-MetroDocument16 pagesManual de Usuario Ph-Metrojuan alejandro moyaNo ratings yet
- Business Plan Hindi Pa FinalDocument10 pagesBusiness Plan Hindi Pa FinalMaria Theresa Cortez MendozaNo ratings yet
- How I Made My First: Hundred Thousand DollarsDocument9 pagesHow I Made My First: Hundred Thousand DollarsysabananananaNo ratings yet
- Huawei V1 R3 Upgrade GuideDocument67 pagesHuawei V1 R3 Upgrade GuideMahmoud RiadNo ratings yet
- Financial Status and Academic AchievementDocument20 pagesFinancial Status and Academic AchievementkalbokalapatoNo ratings yet
- Summer Internship TCLDocument21 pagesSummer Internship TCLRahul ChandraNo ratings yet
- SPD Module 1Document15 pagesSPD Module 1Daniel ReyesNo ratings yet
- Use of Headed Reinforcement in Beam - Column JointsDocument24 pagesUse of Headed Reinforcement in Beam - Column JointsHabibi MehediNo ratings yet
- Whatman Price Catalog: GE Healthcare Life SciencesDocument94 pagesWhatman Price Catalog: GE Healthcare Life SciencesGayan Karunasena KonaraNo ratings yet