Download as pdf or txt
You might also like
- DCS PresentationDocument22 pagesDCS PresentationMUHAMMAD TAUFEEQNo ratings yet
- Chapter 1 - Microprocessor Based Instrumentation SystemDocument12 pagesChapter 1 - Microprocessor Based Instrumentation SystemSuroj Burlakoti50% (2)
- Project On Honeywell TDC3000 DcsDocument77 pagesProject On Honeywell TDC3000 DcsAbv Sai75% (4)
- ETE423 EEE423 - Lecture 4 - SPCDocument30 pagesETE423 EEE423 - Lecture 4 - SPCShadman Rahman 1815396660No ratings yet
- T&SS Lecture-6Document41 pagesT&SS Lecture-6sarim imranNo ratings yet
- Control of Switching Systems Unit 4Document17 pagesControl of Switching Systems Unit 4kishor3081No ratings yet
- 2.1 CU CPU Control Unit DesignDocument49 pages2.1 CU CPU Control Unit Designprakuld04No ratings yet
- SWIN Chapter 3 (2023)Document27 pagesSWIN Chapter 3 (2023)Magarsaa Qana'iiNo ratings yet
- Distributed SPCDocument106 pagesDistributed SPCKamal Singh RathoreNo ratings yet
- Stored Program ControlDocument7 pagesStored Program ControlPULAGAMPALLI MANJULANo ratings yet
- Unit III Control Unit DesignDocument45 pagesUnit III Control Unit DesigntsangwanNo ratings yet
- On DcsDocument36 pagesOn DcsAnkit Meena100% (1)
- Real Time Operating System (Rtos)Document21 pagesReal Time Operating System (Rtos)Parvathy JayakumarNo ratings yet
- DSS Unit - 6 NotesDocument15 pagesDSS Unit - 6 NotesLavanya R GowdaNo ratings yet
- Cpen ReviewerDocument8 pagesCpen Reviewerkeithleene trinidadNo ratings yet
- Unit - 8 A Generic Digital Switching System ModelDocument16 pagesUnit - 8 A Generic Digital Switching System ModelLavanya R GowdaNo ratings yet
- A Generic Dss Model: Unit 8Document39 pagesA Generic Dss Model: Unit 8Deepa ShreeNo ratings yet
- Co Unit2 Part2Document10 pagesCo Unit2 Part2Manjushree N.SNo ratings yet
- Over ViewDocument28 pagesOver ViewMulugeta WoldeNo ratings yet
- Unit 1 Part 2Document37 pagesUnit 1 Part 2g.shalini12csNo ratings yet
- CH 5. Transaction Processing Monitors: An OverviewDocument59 pagesCH 5. Transaction Processing Monitors: An OverviewJoan J MaiyoNo ratings yet
- Real Time System1Document71 pagesReal Time System1Manikandan AnnamalaiNo ratings yet
- Distributed Control Systems: Prof - Dr. Joyanta Kumar RoyDocument27 pagesDistributed Control Systems: Prof - Dr. Joyanta Kumar RoyShyamNo ratings yet
- Module 3 Basic Structure of ComputersDocument76 pagesModule 3 Basic Structure of ComputersMadhuNo ratings yet
- Toaz - Info Project On Honeywell Tdc3000 Dcs PRDocument77 pagesToaz - Info Project On Honeywell Tdc3000 Dcs PRMorad MouradNo ratings yet
- Computer Organization - Hardwired V/s Micro-Programmed Control UnitDocument9 pagesComputer Organization - Hardwired V/s Micro-Programmed Control UnitChala GetaNo ratings yet
- A Minor Project: Distributed Control SystemDocument24 pagesA Minor Project: Distributed Control SystemrahulNo ratings yet
- SDNDocument57 pagesSDNvrtrivedi86No ratings yet
- Jawapan OsDocument7 pagesJawapan Ospeace No WarNo ratings yet
- Operating Systems and Linux IDocument41 pagesOperating Systems and Linux Idivyarai12345No ratings yet
- DCS - SCADA-Expert SystemDocument54 pagesDCS - SCADA-Expert SystemArkadeep ChowdhuryNo ratings yet
- Chapter 1 - Microprocessor Based Instrumentation SystemDocument12 pagesChapter 1 - Microprocessor Based Instrumentation SystemAarav PoudelNo ratings yet
- Instrumentation II PDFDocument209 pagesInstrumentation II PDFNigam MallaNo ratings yet
- Chapter-1: 1.1 Non Real Time Operating SystemsDocument58 pagesChapter-1: 1.1 Non Real Time Operating SystemsAnonymous XybLZfNo ratings yet
- Co Notes Module 1Document42 pagesCo Notes Module 1Vinyas M SNo ratings yet
- Chapter 01 Introduction To Operating SystemsDocument52 pagesChapter 01 Introduction To Operating SystemsMickNo ratings yet
- Distributed Control Systems: Prof - Dr. Joyanta Kumar RoyDocument27 pagesDistributed Control Systems: Prof - Dr. Joyanta Kumar Royramu308No ratings yet
- Unit 6Document31 pagesUnit 6Apurva JarwalNo ratings yet
- SPC ExchanceDocument12 pagesSPC ExchanceCis MarkNo ratings yet
- Chapter 4 (Process Scheduling) )Document27 pagesChapter 4 (Process Scheduling) )hait xllNo ratings yet
- Delta Compact Modular Mid-Range PLC AS SeriesDocument52 pagesDelta Compact Modular Mid-Range PLC AS SeriesXiaofeng XuNo ratings yet
- 4 DataProcessing 2019 UPDocument25 pages4 DataProcessing 2019 UPAnnowit RichardNo ratings yet
- Embedded SystemsDocument28 pagesEmbedded SystemsCheril Mehta0% (1)
- ALU, Data Path and Control UnitDocument24 pagesALU, Data Path and Control UnitTanisha Jauhari 21BCE3566No ratings yet
- DEH Control System TrainDocument14 pagesDEH Control System Trainkarthick.gNo ratings yet
- The Control Unit (CU) Is A Component of A Computer's Central Processing 2Document6 pagesThe Control Unit (CU) Is A Component of A Computer's Central Processing 2TrixieNo ratings yet
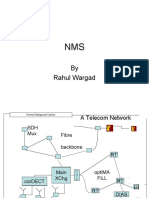
- By Rahul WargadDocument25 pagesBy Rahul WargadKailazhNo ratings yet
- CA MaterialDocument109 pagesCA MaterialVinay ViratNo ratings yet
- Slide #5Document32 pagesSlide #5lewjw-wm22No ratings yet
- Lecture 1's Sequence: Programmable Logic Controllers Parts of A PLCDocument52 pagesLecture 1's Sequence: Programmable Logic Controllers Parts of A PLCminh quan leNo ratings yet
- InstrumentationDocument55 pagesInstrumentationmurali100% (1)
- Lecture 9 - SCADA SystemsDocument53 pagesLecture 9 - SCADA SystemsDebabrata Adak.No ratings yet
- 2nd Educational Article - Part 2Document5 pages2nd Educational Article - Part 2Francisco AugustoNo ratings yet
- 2 Real-Time Control System and Real-Time NetworksDocument7 pages2 Real-Time Control System and Real-Time NetworksSam eagle goodNo ratings yet
- Operating SystemDocument26 pagesOperating SystemSelin DandpatNo ratings yet
- Control UnitDocument4 pagesControl Unitdivine iyawaNo ratings yet
- Tf13 Factorytalk System Design Considerations RstechedDocument101 pagesTf13 Factorytalk System Design Considerations RstechedBeto De HermosilloNo ratings yet
- Instrumentation and Control: Hapter Nstrumentation AND OntrolDocument16 pagesInstrumentation and Control: Hapter Nstrumentation AND OntrolSaravanan RagupathyNo ratings yet
- Next-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsFrom EverandNext-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsNo ratings yet
- Swastik Gupta - 23.Document20 pagesSwastik Gupta - 23.SwastikNo ratings yet
- Unit 2 Final MergedDocument38 pagesUnit 2 Final MergedSwastikNo ratings yet
- Unit 2Document32 pagesUnit 2SwastikNo ratings yet
- Unit 2Document30 pagesUnit 2SwastikNo ratings yet
- Unit 1 ITCDocument25 pagesUnit 1 ITCSwastikNo ratings yet
- Unit 6Document15 pagesUnit 6SwastikNo ratings yet
- Unit 5Document11 pagesUnit 5SwastikNo ratings yet
- Digital Design and Computer Architecture, 2: EditionDocument134 pagesDigital Design and Computer Architecture, 2: EditionСергей Капуста100% (1)
- E-Con See3CAM CU55 DatasheetDocument20 pagesE-Con See3CAM CU55 DatasheetSankar RamNo ratings yet
- MICROPROCESSOR-Unit IIDocument38 pagesMICROPROCESSOR-Unit IIgiri dipeshNo ratings yet
- Avalon Verification IP Suite User GuideDocument199 pagesAvalon Verification IP Suite User GuidemanchuricoNo ratings yet
- Cs8491 CA QbankDocument128 pagesCs8491 CA QbankSuresh Kanna100% (1)
- Mohamed Sathak A J College of Engineering: Model Exam (Set 1)Document3 pagesMohamed Sathak A J College of Engineering: Model Exam (Set 1)formyphdNo ratings yet
- NHOS GUIDE en v4 2Document13 pagesNHOS GUIDE en v4 2nieav280No ratings yet
- HP EliteBook 840 G2 Notebook PC PDFDocument5 pagesHP EliteBook 840 G2 Notebook PC PDFDragisinNo ratings yet
- Hyper-Threading Technology: Presented by Nagarajender Rao KatooriDocument27 pagesHyper-Threading Technology: Presented by Nagarajender Rao KatooricchethucNo ratings yet
- PC Software Help HDS200&300Document19 pagesPC Software Help HDS200&300Oscar AlanisNo ratings yet
- HardwareDocument21 pagesHardwareSimranNo ratings yet
- WJ-PU201/G: 60W Single Port Power Over EthernetDocument2 pagesWJ-PU201/G: 60W Single Port Power Over EthernetkarimNo ratings yet
- FSP EAS v2.4 Errata ADocument120 pagesFSP EAS v2.4 Errata Ahafiedh hafedhNo ratings yet
- HP Envy 15 15j015sr 15sbgt 6050a2547601 rx01 Laptop Schematics PDFDocument70 pagesHP Envy 15 15j015sr 15sbgt 6050a2547601 rx01 Laptop Schematics PDFPaxOtiumNo ratings yet
- Link OS v6.4ReleaseNotesDocument193 pagesLink OS v6.4ReleaseNotesandres henaoNo ratings yet
- CHAPTER THREE Micro PocessorDocument54 pagesCHAPTER THREE Micro PocessorSaravanan JayabalanNo ratings yet
- DR900 200870001011Document1 pageDR900 200870001011Mohammad Hafizh As'adNo ratings yet
- Vectra VL400 SeriesDocument14 pagesVectra VL400 Seriesrene_canlasNo ratings yet
- Nepal Higher Seconday School Rathnanagar 2, Tandi, Chitwan Second Terminal Examination - 2073 (Mangshir)Document2 pagesNepal Higher Seconday School Rathnanagar 2, Tandi, Chitwan Second Terminal Examination - 2073 (Mangshir)Nishad MallaNo ratings yet
- Unit 3Document104 pagesUnit 3Avantee SinghNo ratings yet
- Linux PCIe Drivers Guide Via chatGPTDocument38 pagesLinux PCIe Drivers Guide Via chatGPTcodesnishNo ratings yet
- SolaX Power Troubleshooting X1MINI&AIR&BOOST PDFDocument10 pagesSolaX Power Troubleshooting X1MINI&AIR&BOOST PDFmarketingsunfix sunfix100% (1)
- Ques - Chapter 03 - 1 - Sum2019Document2 pagesQues - Chapter 03 - 1 - Sum2019Huy HoàngNo ratings yet
- Mcs Type B: Foam Maker & Foam ChamberDocument6 pagesMcs Type B: Foam Maker & Foam ChamberViant NurulitaNo ratings yet
- TelemecaniqueDocument4 pagesTelemecaniqueLegi YangNo ratings yet
- HP Sprocket ManualDocument12 pagesHP Sprocket ManualJoelLeGendreNo ratings yet
- Enviar A Valores de Fabrica Un Equipo 2015-2018Document2 pagesEnviar A Valores de Fabrica Un Equipo 2015-2018jose faustoNo ratings yet
- Lab02reporttemplatebej40401 1Document11 pagesLab02reporttemplatebej40401 1Love your LifeNo ratings yet
- RTL8019ASDocument50 pagesRTL8019ASgovemi7604No ratings yet
- Card Reader Support List 0110 en PDFDocument3 pagesCard Reader Support List 0110 en PDFOrlando Jr. LobramonteNo ratings yet