Download as docx, pdf, or txt
You might also like
- Claas Disco 2650 C Plus / RC - Parts CatalogDocument8 pagesClaas Disco 2650 C Plus / RC - Parts CatalogManuals Catalogs0% (1)
- Steven Mark Tpu - A Detail Study of The Steven Mark Tpu - A Detail Study - Tpu-DsmithDocument473 pagesSteven Mark Tpu - A Detail Study of The Steven Mark Tpu - A Detail Study - Tpu-DsmithRoyNo ratings yet
- 3 To 8 Decoder in NGSPICEDocument14 pages3 To 8 Decoder in NGSPICEJaydip FadaduNo ratings yet
- Machine Design Algorithm For MD 3pim - 1Document1 pageMachine Design Algorithm For MD 3pim - 1abhishek tripathiNo ratings yet
- Example 5: A 250 KW, 460V, 600r.p.m, 6 Pole DC Is Built With An Armature Diameter of 72cmDocument3 pagesExample 5: A 250 KW, 460V, 600r.p.m, 6 Pole DC Is Built With An Armature Diameter of 72cmhakkı_aNo ratings yet
- EMDmod 2Document28 pagesEMDmod 2SuprithaNo ratings yet
- Induction Motor DesignDocument34 pagesInduction Motor DesignNasr GhanmiNo ratings yet
- Induction Motor DesignDocument35 pagesInduction Motor DesignGajendra TeliNo ratings yet
- Free-Samples Amie Chapters Induction-Motor-DesignDocument35 pagesFree-Samples Amie Chapters Induction-Motor-DesignGlen TuranganNo ratings yet
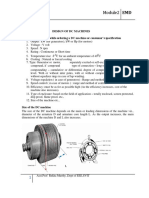
- Chapter.2 Design of DC Machines Details To Be Specified While Ordering A DC Machine or Consumer's SpecificationDocument24 pagesChapter.2 Design of DC Machines Details To Be Specified While Ordering A DC Machine or Consumer's SpecificationSattar BalochNo ratings yet
- Sardar Vallabhbhai Institute of Technology, VasadDocument15 pagesSardar Vallabhbhai Institute of Technology, VasadSANJAYNo ratings yet
- Ps Exp 1 PDFDocument6 pagesPs Exp 1 PDFrv_andeNo ratings yet
- Power System Simulation Laboratory: A RecordDocument120 pagesPower System Simulation Laboratory: A Recordela666666No ratings yet
- Experiment 2Document5 pagesExperiment 2vaibhav dhamaleNo ratings yet
- Ambiga JDocument120 pagesAmbiga Jela666666No ratings yet
- Output Equation of DC Machines.Document5 pagesOutput Equation of DC Machines.srinimeha@gmail.com0% (1)
- L-13 (DK) (Pe) ( (Ee) Nptel)Document108 pagesL-13 (DK) (Pe) ( (Ee) Nptel)Akshaya HariharanNo ratings yet
- Machine Design.Document6 pagesMachine Design.AYUSHI CHAUDHARYNo ratings yet
- SSDDocument16 pagesSSDjit20088791No ratings yet
- Cable Structure Design Based On ASCE 19-10 & AASHTO 17th: Project: Client: Design By: Job No.: Date: Review byDocument1 pageCable Structure Design Based On ASCE 19-10 & AASHTO 17th: Project: Client: Design By: Job No.: Date: Review byMadhusudan ShewalkarNo ratings yet
- Cable StructureDocument1 pageCable StructureAgnichandra SubediNo ratings yet
- Chapter 3 - Three Phase Induction MotorsDocument46 pagesChapter 3 - Three Phase Induction MotorsiyufikirteNo ratings yet
- Surface-Stress Analysis of A Spur-Gear Train: EXAMPLE 12-6Document4 pagesSurface-Stress Analysis of A Spur-Gear Train: EXAMPLE 12-6Jesus 'JsaNo ratings yet
- Cálculos A Realizar Con Los Datos de Placa de Los Motores Eléctricos Clase RevDocument2 pagesCálculos A Realizar Con Los Datos de Placa de Los Motores Eléctricos Clase RevSamuel DelgadoNo ratings yet
- Unit IiDocument27 pagesUnit IiThomas NigilNo ratings yet
- Steel Beam Web Stiffener Analysis For Concentrated Loads (ASD)Document6 pagesSteel Beam Web Stiffener Analysis For Concentrated Loads (ASD)oluomo1No ratings yet
- End Plate Moment ConnectionDocument4 pagesEnd Plate Moment Connectionmahhor82_635643838No ratings yet
- Step-ByStep Flyback SMPS DesignDocument6 pagesStep-ByStep Flyback SMPS DesignPhạm Văn TưởngNo ratings yet
- E = 1 (wФZ) (P) volts 2∏ A Where: a = 2-for simplex wave-winding = P-for simplex lap-winding For a given d.c. machine, Z, P and a are constant. Hence, putting Ka = ZP/aDocument2 pagesE = 1 (wФZ) (P) volts 2∏ A Where: a = 2-for simplex wave-winding = P-for simplex lap-winding For a given d.c. machine, Z, P and a are constant. Hence, putting Ka = ZP/aMark julius garciaNo ratings yet
- Economical VoltageDocument30 pagesEconomical VoltageMuhammad AdilNo ratings yet
- Cable Structure Design Based On ASCE 19-10 & AASHTO 17th: Project: Client: Design By: Job No.: Date: Review byDocument1 pageCable Structure Design Based On ASCE 19-10 & AASHTO 17th: Project: Client: Design By: Job No.: Date: Review byjklo12No ratings yet
- Lab 3 Switched Capacitor SimulationDocument28 pagesLab 3 Switched Capacitor SimulationDavid TynanNo ratings yet
- EE 2257-Control Systems Lab ManualDocument66 pagesEE 2257-Control Systems Lab ManualRam KumarNo ratings yet
- DC Machine DesignDocument25 pagesDC Machine DesignJatin PradhanNo ratings yet
- R-L-C Components: TheboysDocument15 pagesR-L-C Components: TheboysBennyvic Joyce Japitana EsguerraNo ratings yet
- Fundamental of Power Electronics Week 8 Assignment SolutionsDocument4 pagesFundamental of Power Electronics Week 8 Assignment SolutionsDeep Gandhi100% (1)
- QE Hands-OnDocument9 pagesQE Hands-Onw inxNo ratings yet
- Unit Iv Induction MotorsDocument52 pagesUnit Iv Induction MotorsSatish SaweNo ratings yet
- Arduino - CapacitanceMeterDocument5 pagesArduino - CapacitanceMeterRoberto de FazioNo ratings yet
- IEC 60137, Proposal of AmendmentDocument5 pagesIEC 60137, Proposal of Amendmentnjaman1958No ratings yet
- Emd Unit 4 NotesDocument52 pagesEmd Unit 4 NotesJitendra AnneNo ratings yet
- Energy Conversion 5Document27 pagesEnergy Conversion 59773507337No ratings yet
- Ch5 SinglePhaseTrans TutorialDocument16 pagesCh5 SinglePhaseTrans TutorialBrian LiNo ratings yet
- To Investigate A Self Designed TransformerDocument18 pagesTo Investigate A Self Designed TransformerSheen93% (15)
- Fcs Open EndedDocument4 pagesFcs Open Endedxces 2312No ratings yet
- Physics Original AfDocument12 pagesPhysics Original Afananyasamanta48No ratings yet
- Department of Electrical Engineering Indian Institute of Technology, Kanpur EE 311 Home Assignment #7 Assigned: 27.2.23 Due: 13.3.23Document1 pageDepartment of Electrical Engineering Indian Institute of Technology, Kanpur EE 311 Home Assignment #7 Assigned: 27.2.23 Due: 13.3.23Manan KalavadiaNo ratings yet
- CademDocument9 pagesCademZaid Hasan KhanNo ratings yet
- PADHMASREE.P XII-A Physics Project 2023-24Document14 pagesPADHMASREE.P XII-A Physics Project 2023-24punni1978No ratings yet
- Assignment 5Document5 pagesAssignment 5maha saeedNo ratings yet
- AC Machine WindingsDocument22 pagesAC Machine WindingspranathiNo ratings yet
- Transmission and Distribution DesignDocument31 pagesTransmission and Distribution DesignER.Master Ajay RimalNo ratings yet
- To Investigate A Self Designed TransformerDocument18 pagesTo Investigate A Self Designed Transformerkriti tyagi100% (1)
- Chapter 4Document8 pagesChapter 4gayatrigouda282No ratings yet
- Analog Circuits Lab Manual1Document83 pagesAnalog Circuits Lab Manual1mansoorpasha.ece2020.ncNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Homopolar Generators An OverviewDocument5 pagesHomopolar Generators An OverviewSpandana ReddyNo ratings yet
- Week1 - Diode Semiconductor1Document42 pagesWeek1 - Diode Semiconductor1ALEN chiaNo ratings yet
- Thermo Acoustic Refrigeration5Document25 pagesThermo Acoustic Refrigeration5Classic PrintersNo ratings yet
- E08-S01 - 1 Low Voltage Switchgear (NEC)Document12 pagesE08-S01 - 1 Low Voltage Switchgear (NEC)Muhammad IrfanNo ratings yet
- 06 Week-3, Domain-1 Advanced Science and MathamaticsDocument25 pages06 Week-3, Domain-1 Advanced Science and Mathamaticsrenjo thomsonNo ratings yet
- PGDC (Ppe) Information BrochureDocument7 pagesPGDC (Ppe) Information BrochureKaviyarasan SNo ratings yet
- Second Term Exam Co2 EmmissionsDocument2 pagesSecond Term Exam Co2 EmmissionsNadia LarbiNo ratings yet
- Project Report - MFG of Specialty Chemicals by Krishna Antioxidants PVT LTDDocument8 pagesProject Report - MFG of Specialty Chemicals by Krishna Antioxidants PVT LTDAshok PatilNo ratings yet
- Lab - Pipe - Fittings (3) - 1-2Document13 pagesLab - Pipe - Fittings (3) - 1-2Abidul IslamNo ratings yet
- Fiat Barchetta: EngineDocument7 pagesFiat Barchetta: EngineHallex OliveiraNo ratings yet
- BricksDocument19 pagesBricksKothapally PrashanthNo ratings yet
- Solar PV Module Fault Classification Using Artificial Intelligence and Machine Learning TechniquesDocument18 pagesSolar PV Module Fault Classification Using Artificial Intelligence and Machine Learning TechniquesJITAMITRANo ratings yet
- BTP 11-3 - R4 - 2016-Design Guidance For Solid Radioactive Waste Management Systems Installed in Light-Water-Cooled NPPDocument12 pagesBTP 11-3 - R4 - 2016-Design Guidance For Solid Radioactive Waste Management Systems Installed in Light-Water-Cooled NPPTing Yi LiaoNo ratings yet
- CHP 2... Safety in Pressure System (Controllable Units)Document56 pagesCHP 2... Safety in Pressure System (Controllable Units)kira ENTERTAINMENT100% (2)
- Evaluating Heat Exchanger Performance ResearchDocument9 pagesEvaluating Heat Exchanger Performance ResearchMohamed RagabNo ratings yet
- Denso AC System Troubleshooting GuideDocument2 pagesDenso AC System Troubleshooting Guideklash056No ratings yet
- High-Temperature Deformation Behavior and Processing Map of The As Cast Inconel 625 AlloyDocument9 pagesHigh-Temperature Deformation Behavior and Processing Map of The As Cast Inconel 625 Alloy鄭勝元No ratings yet
- PS M 0328 E DatasheetDocument2 pagesPS M 0328 E DatasheetJose Alberto Gonzalez SaucedoNo ratings yet
- Introduction To ECT - OKDocument57 pagesIntroduction To ECT - OKMan Nguyen TheNo ratings yet
- LTZ Catalogo Ga041 0601gbDocument24 pagesLTZ Catalogo Ga041 0601gbRo BaNo ratings yet
- Limitations of Shuttle LoomsDocument3 pagesLimitations of Shuttle LoomsDr. J. P. Singh0% (1)
- NORGREN Pressure SensorDocument3 pagesNORGREN Pressure SensorWily WayerNo ratings yet
- Balance Diesel Oil Noviembre 2022Document1 pageBalance Diesel Oil Noviembre 2022Jaime Orlando Quiroz AlarconNo ratings yet
- En 600ugStepUpSine 1Document35 pagesEn 600ugStepUpSine 1cristian mauricio calderon escobarNo ratings yet
- Unit IV Distribution System ProtectionDocument9 pagesUnit IV Distribution System Protection23f1002933No ratings yet
- (Draft - Jurnal) KONTROL YAW DAN ROLLING LAYAR PADA KAPAL MODEL KATAMARAN - Mohammad - Kamil - Firdaus - 1741170060Document8 pages(Draft - Jurnal) KONTROL YAW DAN ROLLING LAYAR PADA KAPAL MODEL KATAMARAN - Mohammad - Kamil - Firdaus - 1741170060Anwar CoreNo ratings yet
- 247-17-OGS-16AP03 Stuck Pig Procedure and Pig Location RecoveryDocument8 pages247-17-OGS-16AP03 Stuck Pig Procedure and Pig Location RecoveryFahmy FlipNo ratings yet
- HD Materi Operator Competency Assessment (OCA)Document74 pagesHD Materi Operator Competency Assessment (OCA)Mel MelisaNo ratings yet