Download as pdf or txt
You might also like
- Geology NotesDocument8 pagesGeology NotesLily QuiNo ratings yet
- Spur GearsDocument96 pagesSpur GearsVamshi Reddy100% (1)
- Gears and Gear Drives!!Document55 pagesGears and Gear Drives!!Ishank Singh SandhuNo ratings yet
- Images - A ReaderDocument169 pagesImages - A Readeralicethecamel100% (4)
- Dynamic Response of Fixed Offshore Structures Under Environmental LoadsDocument16 pagesDynamic Response of Fixed Offshore Structures Under Environmental LoadsxautraixxxxxxNo ratings yet
- Gear DesignDocument41 pagesGear DesignJagan NathanNo ratings yet
- Design of Spur GearDocument67 pagesDesign of Spur GearShubham DhurjadNo ratings yet
- GearDocument35 pagesGearNIYASNo ratings yet
- Unit-4 Bevel GearsDocument27 pagesUnit-4 Bevel GearsMarthande50% (2)
- Name:-Yash Shah Enrollment No: - 150120119181 Branch & Class: - Mechanical (7-CG) Subject: - Machine Design (2171909) Topic: - Spur Gear and Design of Spur GearDocument16 pagesName:-Yash Shah Enrollment No: - 150120119181 Branch & Class: - Mechanical (7-CG) Subject: - Machine Design (2171909) Topic: - Spur Gear and Design of Spur GearBossNo ratings yet
- MECH 344/M Machine Element DesignDocument75 pagesMECH 344/M Machine Element DesignlitonNo ratings yet
- Design of GearsDocument94 pagesDesign of Gears60-Hafiz Muhammad AbdullahNo ratings yet
- Spur GearDocument107 pagesSpur GearMuhammadUmairShafiqNo ratings yet
- 3 - Gear Design PDFDocument136 pages3 - Gear Design PDFRachit100% (1)
- Design of GearsDocument57 pagesDesign of Gearsraj sopariaNo ratings yet
- Design of Transmission Systems: Prepared by Dr.A.Vinoth JebarajDocument148 pagesDesign of Transmission Systems: Prepared by Dr.A.Vinoth Jebarajrishi raja RajaNo ratings yet
- DME AllDocument36 pagesDME AllBashu Dev SanjelNo ratings yet
- SpurDocument57 pagesSpurDangol RupeshNo ratings yet
- Design Procedure For Spur and Helical Gear PDFDocument15 pagesDesign Procedure For Spur and Helical Gear PDFBinoy K B100% (2)
- Kom Unit 4 NotesDocument68 pagesKom Unit 4 NotesParkunam Randy100% (1)
- Design and Performance of Gear Pumps With A Non-Involute Tooth ProfileDocument13 pagesDesign and Performance of Gear Pumps With A Non-Involute Tooth ProfileMorteza ShakerienNo ratings yet
- GearsDocument70 pagesGearsJayesh NayakantiNo ratings yet
- Bevel GearDocument28 pagesBevel Gearmahesh kitturNo ratings yet
- Gear DesignDocument67 pagesGear DesignrobineNo ratings yet
- Toothed GearingDocument33 pagesToothed GearingpvkkrNo ratings yet
- GearsDocument46 pagesGearsNarender NarruNo ratings yet
- Toothed GearingDocument80 pagesToothed GearingArjun RajuNo ratings yet
- Bevel ExplanationDocument4 pagesBevel ExplanationVarun VaidyaNo ratings yet
- Brecher2013 Article InfluenceOfTheManufacturingMetDocument10 pagesBrecher2013 Article InfluenceOfTheManufacturingMetranim najibNo ratings yet
- Design of Spur Gear - Fundamentals - 1Document19 pagesDesign of Spur Gear - Fundamentals - 1Dhyan PatelNo ratings yet
- Design of Machine Elements-II (MEPC-306) : Prepared By: DR Saurabh Kango Assistant Professor NIT JalandharDocument21 pagesDesign of Machine Elements-II (MEPC-306) : Prepared By: DR Saurabh Kango Assistant Professor NIT JalandharGAURAV YADAVNo ratings yet
- Gears - General: Shigley's Mechanical Engineering DesignDocument229 pagesGears - General: Shigley's Mechanical Engineering DesignbasitNo ratings yet
- Design of GearsDocument40 pagesDesign of GearsSurya PrakashNo ratings yet
- Bevel - Gears Konik Dişli HesabıDocument6 pagesBevel - Gears Konik Dişli HesabıserkanNo ratings yet
- Unit - 4Document85 pagesUnit - 4Shriparno deyNo ratings yet
- Gear Design NhpancholiDocument66 pagesGear Design NhpancholiDINESH KUMARNo ratings yet
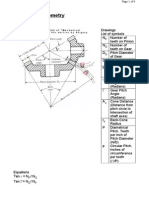
- Bevel Gear GeometryDocument4 pagesBevel Gear GeometryNawaz JaswalNo ratings yet
- Note On Gear BoxDocument32 pagesNote On Gear BoxanupbagNo ratings yet
- ME324 Lecture5Document66 pagesME324 Lecture5Jam Maica TuboNo ratings yet
- GearsDocument51 pagesGearsKasi Visweswar Rao100% (1)
- 1 s2.0 S0094114X22004451 MainDocument29 pages1 s2.0 S0094114X22004451 MainlokeshNo ratings yet
- Design of Machine Elements-II: Lecture By: - Engr Aakash Munsif Mechanical Engineering DepartmentDocument37 pagesDesign of Machine Elements-II: Lecture By: - Engr Aakash Munsif Mechanical Engineering DepartmentMuhammad Mubashar FareedNo ratings yet
- Bevel GearDocument9 pagesBevel GearAadil KhanNo ratings yet
- Experiment No. - 5: Object: Apparatus: TheoryDocument10 pagesExperiment No. - 5: Object: Apparatus: TheoryROHIT SRIVASTAVNo ratings yet
- MEC 410 Chapter 8 Spring 2017Document68 pagesMEC 410 Chapter 8 Spring 2017Frederick KooNo ratings yet
- DTS Question BankDocument3 pagesDTS Question BankRakheeb BashaNo ratings yet
- Sensitivity Analysis For The Tolerancing of Gear Profiles With Stochastic ErrorsDocument10 pagesSensitivity Analysis For The Tolerancing of Gear Profiles With Stochastic ErrorsMaksat TemirkhanNo ratings yet
- Machine Design & CAD-II Lecture 01gears & Types of GearsDocument44 pagesMachine Design & CAD-II Lecture 01gears & Types of GearsMuhammad Naveed 952-FET/BSME/F20No ratings yet
- Friction Wheels: Toothed GearingDocument23 pagesFriction Wheels: Toothed GearingAnmolNo ratings yet
- Toothed Gears - Spur GearsDocument38 pagesToothed Gears - Spur GearsHarshal RodgeNo ratings yet
- GEARSDocument35 pagesGEARS1237Nasmal NNo ratings yet
- 7 Gears: 7.1 Gear ClassificationDocument15 pages7 Gears: 7.1 Gear ClassificationSimrit Kaur MakanNo ratings yet
- Design of Spur GearsDocument29 pagesDesign of Spur GearsAishwarya RameshNo ratings yet
- A Crowning Achievement For Automotive ApplicationsDocument10 pagesA Crowning Achievement For Automotive ApplicationsCan CemreNo ratings yet
- Optimization of Tooth-Root Profile For Maximumload-Carrying Capacity: Spur and Bevel GearsDocument13 pagesOptimization of Tooth-Root Profile For Maximumload-Carrying Capacity: Spur and Bevel GearsAlexei MorozovNo ratings yet
- Tooth Design: Forces Acting On Spur GearsDocument8 pagesTooth Design: Forces Acting On Spur GearsMeghanath AdkonkarNo ratings yet
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
- Bearings: A Tribology HandbookFrom EverandBearings: A Tribology HandbookM. J. NealeRating: 3 out of 5 stars3/5 (8)
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- 9 Riveted JointsDocument72 pages9 Riveted JointsROHAN PILLAI100% (1)
- Threaded FastenersDocument28 pagesThreaded FastenersROHAN PILLAINo ratings yet
- 10 Welded JointsDocument20 pages10 Welded JointsROHAN PILLAINo ratings yet
- 6 SpringsDocument91 pages6 SpringsROHAN PILLAINo ratings yet
- Chapter 5 - Organizational Agility PDFDocument41 pagesChapter 5 - Organizational Agility PDFOh Jia HaoNo ratings yet
- Ls Fitting SlidesDocument33 pagesLs Fitting Slidesjaneth44No ratings yet
- 05 - Flex BDocument23 pages05 - Flex BNathan MolongwanaNo ratings yet
- Instructions For Accessing MathXL 30 Day TrialDocument3 pagesInstructions For Accessing MathXL 30 Day TrialAdie94No ratings yet
- Pondoc Kee Jay Work 5Document5 pagesPondoc Kee Jay Work 5Spring IrishNo ratings yet
- Resume Sample For TeenagerDocument6 pagesResume Sample For Teenagerafjwoovfsmmgff100% (2)
- Technological Institute of The Philippines Course Syllabus: ENGL 253 / 313/293 Technical WritingDocument4 pagesTechnological Institute of The Philippines Course Syllabus: ENGL 253 / 313/293 Technical WritingtipqccagssdNo ratings yet
- Is 805Document38 pagesIs 805Sse SteelNo ratings yet
- DM G+12 & Unlimited Test QuestionDocument19 pagesDM G+12 & Unlimited Test Questionmajd el chami100% (1)
- E-Proceedings - ICCRET-2023Document30 pagesE-Proceedings - ICCRET-2023RAGHIB R SHARIFNo ratings yet
- Water-Based Polyurethane and Acrylate Dispersions For Flexible SubstratesDocument6 pagesWater-Based Polyurethane and Acrylate Dispersions For Flexible SubstratesDan RoskeNo ratings yet
- A Study On Marketing Strategies of LIC Agents With Special Reference To Branches in Madurai DivisionDocument14 pagesA Study On Marketing Strategies of LIC Agents With Special Reference To Branches in Madurai DivisionAjanta BearingNo ratings yet
- Procedures For Project Formulation and Management (PPFM) in DrdoDocument86 pagesProcedures For Project Formulation and Management (PPFM) in Drdomkarya_247850155No ratings yet
- Grade 6 - Q1 - W3 - BDocument2 pagesGrade 6 - Q1 - W3 - BMary Joy G TornoNo ratings yet
- EchoAndReverberation PDFDocument19 pagesEchoAndReverberation PDFSlavita JarcovNo ratings yet
- Day 4 - Lab - Newton's 2nd Law v.2Document2 pagesDay 4 - Lab - Newton's 2nd Law v.2johnNo ratings yet
- Vpsa O2 Systems Brochure ML IND0032Document8 pagesVpsa O2 Systems Brochure ML IND0032kalaiNo ratings yet
- CP GeoDocument123 pagesCP GeoJakovPoliakovNo ratings yet
- Comparison of The Main Ethanol Dehydration TechnolDocument7 pagesComparison of The Main Ethanol Dehydration TechnolLuiz Rodrigo AssisNo ratings yet
- Crowding Risk in Smart Beta StrategiesDocument32 pagesCrowding Risk in Smart Beta StrategiesRogerio Monaco SimõesNo ratings yet
- Lesson Plan Template - Social EmotionalDocument2 pagesLesson Plan Template - Social Emotionalapi-573540610No ratings yet
- AIM R16 WS02 Rear SpoilerDocument30 pagesAIM R16 WS02 Rear SpoilerAnonymous PJP78mSxNo ratings yet
- 06impersonal Passive - AnswersDocument9 pages06impersonal Passive - AnswersJayavelu Damu0% (1)
- CATIA V5 Design With Analysis: (Tutorial 3 - Deep Fry Basket)Document136 pagesCATIA V5 Design With Analysis: (Tutorial 3 - Deep Fry Basket)Oscar Al KantNo ratings yet
- Andrew GroveDocument16 pagesAndrew GroveArslanNo ratings yet
- Peter GärdenforsDocument9 pagesPeter GärdenforsusamaknightNo ratings yet
- Lesson 1 (Circles)Document25 pagesLesson 1 (Circles)Anna Victoria MadrilejosNo ratings yet