Download as pdf or txt
You might also like
- Heterogeneous Crowd Simulation Using Parametric Reinforcement LearningDocument18 pagesHeterogeneous Crowd Simulation Using Parametric Reinforcement LearningDrishti SenNo ratings yet
- Entropy 25 00853 With CoverDocument15 pagesEntropy 25 00853 With CoverDemie RedNo ratings yet
- Deep Tracking ControlDocument18 pagesDeep Tracking ControlRyanNo ratings yet
- Single Landmark Distance-Based NavigationDocument8 pagesSingle Landmark Distance-Based NavigationAdeeba AliNo ratings yet
- 1 s2.0 S0167739X18325299 MainDocument9 pages1 s2.0 S0167739X18325299 Mainroi.ho2706No ratings yet
- Cooperative Trajectory Planning in An Intercommunicating Group of UAVs For Convex Plume WrappingDocument7 pagesCooperative Trajectory Planning in An Intercommunicating Group of UAVs For Convex Plume Wrappingmarion.martin031995No ratings yet
- Particle Swarm OptimisationDocument16 pagesParticle Swarm OptimisationdoraemonNo ratings yet
- UAV-Aided Post-Disaster Cellular Networks A Novel Stochastic Geometry ApproachDocument13 pagesUAV-Aided Post-Disaster Cellular Networks A Novel Stochastic Geometry Approachzhengying.louNo ratings yet
- Neural SwarmDocument7 pagesNeural SwarmAlexNo ratings yet
- Deep Reinforcement Learning For UAV NavigationThrough Massive MIMO TechniqueDocument6 pagesDeep Reinforcement Learning For UAV NavigationThrough Massive MIMO TechniqueYing SiNo ratings yet
- An Autonomous Swarm of Micro Flying Robots With RaDocument8 pagesAn Autonomous Swarm of Micro Flying Robots With RadoraemonNo ratings yet
- Trustworthy Reinforcement Learning For Quadrotor UAV Tracking Control SystemsDocument14 pagesTrustworthy Reinforcement Learning For Quadrotor UAV Tracking Control Systemssumeet sahuNo ratings yet
- Advanced Network Connectivity Features and Zonal Requ 2023 Computers OperaDocument23 pagesAdvanced Network Connectivity Features and Zonal Requ 2023 Computers OperaSoumojit KumarNo ratings yet
- FANET Application Scenarios and Mobility Models - 2017Document4 pagesFANET Application Scenarios and Mobility Models - 2017Eru Adha DenyNo ratings yet
- Integrating Deep Reinforcement Learning With Model-Based Path PlannerDocument6 pagesIntegrating Deep Reinforcement Learning With Model-Based Path PlannerAdnan HossainNo ratings yet
- Integrity Risk-Based Model Predictive Control For Mobile RobotsDocument7 pagesIntegrity Risk-Based Model Predictive Control For Mobile RobotsCiuban SebastianNo ratings yet
- Fault-Tolerant Cooperative Navigation of Networked UAV Swarms For Forest Fire MonitoringDocument12 pagesFault-Tolerant Cooperative Navigation of Networked UAV Swarms For Forest Fire MonitoringSuhas DevmaneNo ratings yet
- Reciprocal Velocity Obstacles For Real-Time Multi-Agent NavigationDocument8 pagesReciprocal Velocity Obstacles For Real-Time Multi-Agent NavigationDuong NghiaNo ratings yet
- Decentralized Spatial-Temporal Trajectory Planning For Multicopter SwarmsDocument9 pagesDecentralized Spatial-Temporal Trajectory Planning For Multicopter SwarmsCaehhsegffNo ratings yet
- A Neural Network-Based Navigation ApproachDocument17 pagesA Neural Network-Based Navigation Approachcpeña_640996No ratings yet
- ISE2022 Short13 Kim SurveyDocument5 pagesISE2022 Short13 Kim SurveyshaliniNo ratings yet
- Distributed Clustering in Ad-Hoc Sensor Networks: A Hybrid, Energy-Efficient ApproachDocument12 pagesDistributed Clustering in Ad-Hoc Sensor Networks: A Hybrid, Energy-Efficient ApproachNivedita Acharyya 2035No ratings yet
- A Study On Centralised and Decentralised Swarm Robotics Architecture For Part Delivery SystemDocument10 pagesA Study On Centralised and Decentralised Swarm Robotics Architecture For Part Delivery SystemRoxana StanNo ratings yet
- Puede SerDocument14 pagesPuede SerKarenNo ratings yet
- Computational: Optimal Fault TolerantDocument6 pagesComputational: Optimal Fault TolerantbhargeshpatelNo ratings yet
- Robust Trajectory Planning For Spatial-Temporal Multi-Drone Coordination in Large ScenesDocument7 pagesRobust Trajectory Planning For Spatial-Temporal Multi-Drone Coordination in Large Scenesmarion.martin031995No ratings yet
- Addis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer EngineeringDocument22 pagesAddis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer Engineeringbegziew getnetNo ratings yet
- Rethinking Robustness Assessment: Adversarial Attacks On Learning-Based Quadrupedal Locomotion ControllersDocument14 pagesRethinking Robustness Assessment: Adversarial Attacks On Learning-Based Quadrupedal Locomotion ControllersSantosh ChagantiNo ratings yet
- Scirobotics Abm5954Document18 pagesScirobotics Abm5954toremox142No ratings yet
- Position Controlling of A Flapper Drone Using UWBDocument9 pagesPosition Controlling of A Flapper Drone Using UWBMysa ChakrapaniNo ratings yet
- Scaling UPF Instances in 5G 6G Core With Deep Reinforcement Learning-1Document15 pagesScaling UPF Instances in 5G 6G Core With Deep Reinforcement Learning-1Tech TronieNo ratings yet
- Air LoopDocument8 pagesAir LoopGeorge PachitariuNo ratings yet
- Kernel-Guided Training of Implicit Generative Models With Stability GuaranteesDocument22 pagesKernel-Guided Training of Implicit Generative Models With Stability GuaranteeslingsuNo ratings yet
- EI 2020 Art00012 Sultan-Daud-KhanDocument7 pagesEI 2020 Art00012 Sultan-Daud-KhanMateus MatosNo ratings yet
- A Deep Learning Gated Architecture For UGV Navigation Robust To SensorDocument18 pagesA Deep Learning Gated Architecture For UGV Navigation Robust To SensorOscar Ramos SotoNo ratings yet
- Deep Reinforcement Learning With Heuristic CorrectDocument18 pagesDeep Reinforcement Learning With Heuristic CorrectCypher Lite GamingNo ratings yet
- 1-Flying Drone Base Stations For Macro Hotspots PDFDocument10 pages1-Flying Drone Base Stations For Macro Hotspots PDFDHRAIEF AmineNo ratings yet
- A Vision Based Deep Reinforcement Learning Algorithm For UAV Obstacle AvoidanceDocument12 pagesA Vision Based Deep Reinforcement Learning Algorithm For UAV Obstacle Avoidance杨烨峰No ratings yet
- Unsupervised Lane-Change Identification For On-RamDocument8 pagesUnsupervised Lane-Change Identification For On-RamErickson OngNo ratings yet
- Grid-Based Localization Stack For Inspection Drones Towards Automation of Large Scale Warehouse SystemsDocument8 pagesGrid-Based Localization Stack For Inspection Drones Towards Automation of Large Scale Warehouse Systemsevasat111No ratings yet
- Algorithms 14 00240Document14 pagesAlgorithms 14 00240SuyashPratapNo ratings yet
- Research PaperDocument9 pagesResearch PaperShashi sidhwaniNo ratings yet
- Machine Learning Inspired Sound-Based Amateur Drone Detection For Public Safety ApplicationsDocument9 pagesMachine Learning Inspired Sound-Based Amateur Drone Detection For Public Safety ApplicationsKhurram AzizNo ratings yet
- Deep Multi-View Semi-Supervised ClusteringDocument14 pagesDeep Multi-View Semi-Supervised ClusteringjuanNo ratings yet
- Drones: A Single-Copter UWB-Ranging-Based Localization System Extendable To A Swarm of DronesDocument20 pagesDrones: A Single-Copter UWB-Ranging-Based Localization System Extendable To A Swarm of DronesZain ZaidiNo ratings yet
- A Tractable Approach To Coverage and Rate in Cellular NetworksDocument13 pagesA Tractable Approach To Coverage and Rate in Cellular NetworksEric PritchettNo ratings yet
- An Autonomous Wireless Sensor Network Deployment System Using Mobile Robots For Human Existence Detection in Case of DisastersDocument15 pagesAn Autonomous Wireless Sensor Network Deployment System Using Mobile Robots For Human Existence Detection in Case of DisastersAli MaaroufNo ratings yet
- A Decentralized Cluster Formation Containment Framework For Multirobot SystemsDocument20 pagesA Decentralized Cluster Formation Containment Framework For Multirobot SystemsMuhammad Muzamal ShahzadNo ratings yet
- Defeating Proactive Jammers Using Deep Reinforcement Learning For Resource-Constrained IoT NetworksDocument6 pagesDefeating Proactive Jammers Using Deep Reinforcement Learning For Resource-Constrained IoT Networkszking199898No ratings yet
- Dynamic Resource Reservation Based Collision and Deadlock Prevention For Multi-AGVsDocument12 pagesDynamic Resource Reservation Based Collision and Deadlock Prevention For Multi-AGVsIchiware StoreNo ratings yet
- Multi-UAV Systems For Scalability in Last-Mile Logisitics With Formation ControlDocument4 pagesMulti-UAV Systems For Scalability in Last-Mile Logisitics With Formation ControlÖmer Talha BoyacıoğluNo ratings yet
- Cloud ComputingDocument10 pagesCloud Computingyankyyash1306No ratings yet
- Training Autonomous Drones for Search and Rescue with Convolutional Autoencoder-Document47 pagesTraining Autonomous Drones for Search and Rescue with Convolutional Autoencoder-amal.es23No ratings yet
- Obstecal AvoidanceDocument7 pagesObstecal Avoidancemarion.martin031995No ratings yet
- When Transformer Meets Robotic GraspingDocument8 pagesWhen Transformer Meets Robotic Graspings. depNo ratings yet
- Efficient Aerial Image Classification For Dornebased Emergency MonitoringDocument14 pagesEfficient Aerial Image Classification For Dornebased Emergency MonitoringSoo Young ParkNo ratings yet
- A Clustering-Based Coverage Path Planning Method For Autonomous Heterogeneous UAVsDocument11 pagesA Clustering-Based Coverage Path Planning Method For Autonomous Heterogeneous UAVsNAENWI YAABARINo ratings yet
- An Obstacle Avoidance Specific Reinforcement Learni - 2024 - Engineering ApplicaDocument14 pagesAn Obstacle Avoidance Specific Reinforcement Learni - 2024 - Engineering ApplicaWalter Sullivan Felipe GasparNo ratings yet
- Rosendo 2022. Distributed Intelligence On Edge-To-Cloud Continuum - A Systematica Literature ReviewDocument33 pagesRosendo 2022. Distributed Intelligence On Edge-To-Cloud Continuum - A Systematica Literature Reviewpaul rodriguez lopezNo ratings yet
- Kardar-Parisi-Zhang Universality of The Nagel-Schreckenberg ModelDocument10 pagesKardar-Parisi-Zhang Universality of The Nagel-Schreckenberg Modelmario librerosNo ratings yet
- Marginal Speed Confinement Resolves The Conflict Between Correlation and Control in Collective BehaviourDocument15 pagesMarginal Speed Confinement Resolves The Conflict Between Correlation and Control in Collective Behaviourmario librerosNo ratings yet
- Renormalization Group Study of Marginal FerromagnetismDocument13 pagesRenormalization Group Study of Marginal Ferromagnetismmario librerosNo ratings yet
- CpiDocument37 pagesCpimario librerosNo ratings yet
- Commissioning Schedule Rev00Document7 pagesCommissioning Schedule Rev00Nandgulab DeshmukhNo ratings yet
- University of Information Technology Computer Engineering FacilitiesDocument8 pagesUniversity of Information Technology Computer Engineering FacilitiesDương TâmNo ratings yet
- VZ TPR 9208Document19 pagesVZ TPR 9208jeppe1No ratings yet
- Technical Catalogue H Iec STD en Rev0 2021Document268 pagesTechnical Catalogue H Iec STD en Rev0 2021Petre IonNo ratings yet
- Measurement Uncertainty: 7 Steps To CalculateDocument14 pagesMeasurement Uncertainty: 7 Steps To Calculateerwinch100% (1)
- Introduction To E100Document30 pagesIntroduction To E100Ehsan SalehiNo ratings yet
- Development and Validation of Bolted Connection Modeling in LS-DYNA For Large Vehicle ModelsDocument12 pagesDevelopment and Validation of Bolted Connection Modeling in LS-DYNA For Large Vehicle ModelsAmir IskandarNo ratings yet
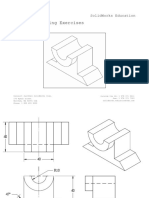
- Detailed Drawing Exercises: Solidworks EducationDocument51 pagesDetailed Drawing Exercises: Solidworks EducationRaja PandiNo ratings yet
- Cogotti - 1998 - A Parametric Study On The Ground Effect of A Simplified Car ModelDocument27 pagesCogotti - 1998 - A Parametric Study On The Ground Effect of A Simplified Car ModelMuhammad FurqanNo ratings yet
- RRL ParallelDocument4 pagesRRL ParallelAmelia LameraNo ratings yet
- PGPpro Brochure 2020 2021Document32 pagesPGPpro Brochure 2020 2021prasadbsnvNo ratings yet
- Household Services NCIIDocument60 pagesHousehold Services NCIIofwwatchNo ratings yet
- Self-Driving Car Using Convolution Neural Network and Road Lane DetectionDocument4 pagesSelf-Driving Car Using Convolution Neural Network and Road Lane DetectionSubhankar DeyNo ratings yet
- Brochure of RASETM-2021-10Document8 pagesBrochure of RASETM-2021-10Harshita MittalNo ratings yet
- Tesslibs 17: Applications Library Mathematical ReferenceDocument41 pagesTesslibs 17: Applications Library Mathematical ReferenceAyman El jafifNo ratings yet
- Chapter 12. Gap Acceptance Theory and ModelsDocument10 pagesChapter 12. Gap Acceptance Theory and ModelsRashmi SahooNo ratings yet
- Yokogawa Success Stories-Oil GasLNGDocument39 pagesYokogawa Success Stories-Oil GasLNGamidi5555913No ratings yet
- Aerodynamic Design Analysis and Testing of Propellers For Small Unmanned Aerial VehiclesDocument13 pagesAerodynamic Design Analysis and Testing of Propellers For Small Unmanned Aerial VehiclesHaydar YahyaNo ratings yet
- Dynamic Analysis of Car Suspension Using ADAMSCarDocument10 pagesDynamic Analysis of Car Suspension Using ADAMSCarHussain TariqNo ratings yet
- Multi-Scale Microstructural Modelling of Concrete Diffusivity: Identification of Significant VariablesDocument50 pagesMulti-Scale Microstructural Modelling of Concrete Diffusivity: Identification of Significant VariablespakshaheenNo ratings yet
- Klas 1 - Teknik Simulasi - Materi 1 - PendahuluanDocument76 pagesKlas 1 - Teknik Simulasi - Materi 1 - PendahuluanRatu SawitriNo ratings yet
- AspenTech University ProgramDocument2 pagesAspenTech University ProgramMikael SalamancaNo ratings yet
- Integrated Automation SystemDocument28 pagesIntegrated Automation SystemJeffrey ArandiaNo ratings yet
- IBM Power8 Functional SimulatorDocument35 pagesIBM Power8 Functional SimulatorMustaffah KabelyyonNo ratings yet
- 02 TCAD Laboratory Sentaurus TCAD GBB OLDDocument23 pages02 TCAD Laboratory Sentaurus TCAD GBB OLDarunNo ratings yet
- SBS5411 1819 02Document48 pagesSBS5411 1819 02Thanh Hoang TranNo ratings yet
- Business Enterprise SimulationDocument74 pagesBusiness Enterprise SimulationJonathan SiguinNo ratings yet
- Microwave and RF Education-Past, Present, and FutureDocument9 pagesMicrowave and RF Education-Past, Present, and FutureNattapong IntarawisetNo ratings yet
- Ems 2015Document47 pagesEms 2015Excequiel Quezada100% (2)
- Syllabus: Communication SystemsDocument8 pagesSyllabus: Communication SystemsAhmed SalemNo ratings yet