Download as pdf or txt
You might also like
- 2 QuadDocument24 pages2 QuadBharat NarumanchiNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Elements of Civil Engineering and Engineering Mechanics Prakash M N Shesha Mogaveer Ganesh B PDFDocument2 pagesElements of Civil Engineering and Engineering Mechanics Prakash M N Shesha Mogaveer Ganesh B PDFsai sathvik0% (1)
- Lec 13Document10 pagesLec 13Krishan MeenaNo ratings yet
- Kinematics of Machines Prof. A. K. Mallik Department of Civil Engineering Indian Institute of Technology, KanpurDocument20 pagesKinematics of Machines Prof. A. K. Mallik Department of Civil Engineering Indian Institute of Technology, KanpurPratyush MishraNo ratings yet
- Lec 1Document27 pagesLec 1Shailendra AsatiNo ratings yet
- Lec 14Document29 pagesLec 14Ishu GoelNo ratings yet
- Rotational Dynamics I: Angular MomentumDocument14 pagesRotational Dynamics I: Angular Momentumrizal123No ratings yet
- Rotational Motion Engineering Mechanics IIT KanpurDocument67 pagesRotational Motion Engineering Mechanics IIT KanpurNitin SharmaNo ratings yet
- Governors Part 2Document11 pagesGovernors Part 2Subash RajeshNo ratings yet
- Rigid Body Dynamics III: Rotation and TranslationDocument11 pagesRigid Body Dynamics III: Rotation and Translationmann123No ratings yet
- NOTESDocument25 pagesNOTESAshfaq AhmedNo ratings yet
- End Term Lab Reports TOMDocument26 pagesEnd Term Lab Reports TOMSabtain AbbasNo ratings yet
- Hoke's JointDocument10 pagesHoke's JointAkash AgarwalNo ratings yet
- E104 - AgustinDocument19 pagesE104 - AgustinSeth Jarl G. AgustinNo ratings yet
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 25Document6 pagesStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 25Dharmendra JainNo ratings yet
- Lec 2Document15 pagesLec 2prince francisNo ratings yet
- Rotational Dynamics II: Rotation About A Fixed AxisDocument11 pagesRotational Dynamics II: Rotation About A Fixed Axisrizal123No ratings yet
- Rotational Equilibrium and Rotational Dynamic 2Document8 pagesRotational Equilibrium and Rotational Dynamic 2Joana OlivaNo ratings yet
- Torsional Defor-WPS OfficeDocument4 pagesTorsional Defor-WPS OfficereannNo ratings yet
- Forced Harmonic VibrationsDocument31 pagesForced Harmonic VibrationsVigil J VijayanNo ratings yet
- Also Refer Last Year Question Papers in Stucor AppDocument10 pagesAlso Refer Last Year Question Papers in Stucor AppRaagul SNo ratings yet
- Dynamics of Rotational MotionDocument45 pagesDynamics of Rotational MotionAudrry Dela CruzNo ratings yet
- CH 15Document7 pagesCH 15akshaybj4396No ratings yet
- Me2302 DomDocument13 pagesMe2302 DomLogesh BabuNo ratings yet
- Mechanical Vibration CEPDocument15 pagesMechanical Vibration CEPUsMan WarraichNo ratings yet
- Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurDocument17 pagesDynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurNeelesh KumarNo ratings yet
- Dynamics of Machines Two MarksDocument13 pagesDynamics of Machines Two MarksJegan ParamasivamNo ratings yet
- Dynamics of MachinesDocument18 pagesDynamics of MachinesIshu GoelNo ratings yet
- Exp 4 DraftDocument5 pagesExp 4 DraftPoison PinkNo ratings yet
- Lec 25Document31 pagesLec 25XetecNo ratings yet
- Lec 28Document14 pagesLec 28Touts ToutsNo ratings yet
- How To Calculate TorqueDocument6 pagesHow To Calculate TorqueAiza Caboles100% (1)
- MOM Lab ReportsDocument17 pagesMOM Lab Reportsfarhan ansarNo ratings yet
- Unit 3 Notes - Engineering Level 3 CtechDocument11 pagesUnit 3 Notes - Engineering Level 3 CtechHadley PeckNo ratings yet
- Experiment # 8: Title: ObjectiveDocument7 pagesExperiment # 8: Title: ObjectiveIbrahim BabarNo ratings yet
- Dynamics of Machinery Oral Question BankDocument22 pagesDynamics of Machinery Oral Question BankSurajKahateRajputNo ratings yet
- Dynamic Force Analysis of MechanismDocument21 pagesDynamic Force Analysis of MechanismAgare TubeNo ratings yet
- MITOCW - MITRES - 6-007s11lec26 - 300k.mp4: ProfessorDocument12 pagesMITOCW - MITRES - 6-007s11lec26 - 300k.mp4: Professoruser2127No ratings yet
- Department of Mechanical Engineering B.E - Iii Year - V Semester Dynamics of Machines Unit I Force AnalysisDocument101 pagesDepartment of Mechanical Engineering B.E - Iii Year - V Semester Dynamics of Machines Unit I Force Analysissuneel kumar rathoreNo ratings yet
- Rotational Motion and DynamicsDocument128 pagesRotational Motion and Dynamicstiredstudent03No ratings yet
- MITx 8.01.3x Mechanics Rotational Dynamics NotesDocument4 pagesMITx 8.01.3x Mechanics Rotational Dynamics NotesklausbaudelaireNo ratings yet
- Instructor (Oussama Khatib) :all Right. So Today, We're Going To The Alps. (VideoDocument15 pagesInstructor (Oussama Khatib) :all Right. So Today, We're Going To The Alps. (VideoidiavoloNo ratings yet
- Kinematics of MechanicsDocument34 pagesKinematics of MechanicsErasmo Israel Garcia Ochoa100% (1)
- Flight DynamicsDocument17 pagesFlight Dynamicsdaviz ronNo ratings yet
- Electrical MachinesDocument15 pagesElectrical Machinesraj sekharNo ratings yet
- Power System Analysis Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, Kanpur Lecture - 17Document30 pagesPower System Analysis Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, Kanpur Lecture - 17Engr Fahimuddin QureshiNo ratings yet
- Dynamics of Physical Systems - Lec01Document24 pagesDynamics of Physical Systems - Lec01rdsrajNo ratings yet
- Theory of Machines-II Lab Lab Session 01: ObjectiveDocument3 pagesTheory of Machines-II Lab Lab Session 01: ObjectiveMechanical WorkNo ratings yet
- Lec 16Document20 pagesLec 16Ishu GoelNo ratings yet
- Harmonic Oscillator II: Damped OscillatorDocument12 pagesHarmonic Oscillator II: Damped Oscillatorpusa123No ratings yet
- 2 Marks Dynamics of MachineryDocument36 pages2 Marks Dynamics of MachineryMartin De Boras PragashNo ratings yet
- Lec 21Document26 pagesLec 21SHOBHA SUTHARNo ratings yet
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 35Document8 pagesStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 35Dharmendra JainNo ratings yet
- Unit - 1 - Force AnalysisDocument14 pagesUnit - 1 - Force AnalysisSrini VasanNo ratings yet
- MITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDocument21 pagesMITOCW - MITRES2 - 002s10linear - Lec02 - 300k-mp4: ProfessorDanielNo ratings yet
- Chapter 6-MOmentum Analysis of Flow SystemsDocument49 pagesChapter 6-MOmentum Analysis of Flow SystemsSalvador Vargas-DiazNo ratings yet
- Rotation: 11.1. Rotational VariablesDocument8 pagesRotation: 11.1. Rotational VariablesJan April MahinayNo ratings yet
- Horsepower and TorqueDocument9 pagesHorsepower and TorqueRoberto Lopez RojasNo ratings yet
- Lec 2Document11 pagesLec 2Rupesh TiwariNo ratings yet
- Lec 1Document11 pagesLec 1Rupesh TiwariNo ratings yet
- HERFDocument6 pagesHERFRupesh TiwariNo ratings yet
- Dislocation TheoryDocument74 pagesDislocation TheoryRupesh TiwariNo ratings yet
- Rse Final 2023Document138 pagesRse Final 2023Rupesh TiwariNo ratings yet
- Fundamentals OF Thermal Conduction: Amit KakkarDocument12 pagesFundamentals OF Thermal Conduction: Amit KakkarRupesh TiwariNo ratings yet
- Ionic Bonding Sem2HDocument7 pagesIonic Bonding Sem2HRupesh TiwariNo ratings yet
- Me Ese 2023 1Document1 pageMe Ese 2023 1Rupesh TiwariNo ratings yet
- 1 Computer Components-1Document4 pages1 Computer Components-1Rupesh TiwariNo ratings yet
- Natural Convection: Amit KakkarDocument5 pagesNatural Convection: Amit KakkarRupesh TiwariNo ratings yet
- Radiation Heat Transfer: Amit KakkarDocument11 pagesRadiation Heat Transfer: Amit KakkarRupesh TiwariNo ratings yet
- FOR M.Tech. Mech. Engg. 2 Years (P.G.D.) From Academic Session 2005-2006Document36 pagesFOR M.Tech. Mech. Engg. 2 Years (P.G.D.) From Academic Session 2005-2006Rupesh TiwariNo ratings yet
- Chap5-7 National Book Foundation 9th Class Conceptual QuestionsDocument7 pagesChap5-7 National Book Foundation 9th Class Conceptual QuestionsWaleed Nasir100% (1)
- WAP 7 - VCB - Control CKTDocument4 pagesWAP 7 - VCB - Control CKTamit guinNo ratings yet
- IEC Motor Data CalculatorDocument6 pagesIEC Motor Data Calculatordcf67myNo ratings yet
- Unit 2 Miller OscillatorDocument8 pagesUnit 2 Miller Oscillatordev_mathanNo ratings yet
- L&T MX Contactor Catalogue PDFDocument9 pagesL&T MX Contactor Catalogue PDFAnonymous lFFnnXmjUuNo ratings yet
- Relay TrainingDocument8 pagesRelay TrainingInsan AzizNo ratings yet
- Facts Devices in EHV LINESDocument19 pagesFacts Devices in EHV LINESAbhishekNo ratings yet
- Transformer Testing - Type Test and Routine Test of Transformer - Electrical4uDocument17 pagesTransformer Testing - Type Test and Routine Test of Transformer - Electrical4urajeshNo ratings yet
- BJ 194E 9S4 Manual Version1.1Document27 pagesBJ 194E 9S4 Manual Version1.1osadeamos8684No ratings yet
- CompAir L23 - 26A 50Hz Compressor Performance Data PDFDocument1 pageCompAir L23 - 26A 50Hz Compressor Performance Data PDFbulentbulut100% (1)
- Types of Drag On AircraftDocument20 pagesTypes of Drag On AircraftPramod DhaigudeNo ratings yet
- Mechanical Engineering Tools, Manufacturing Tools, Design and Manufacturing Calculators Design Reference, GD&T Training Resources - Engineers EdgeDocument6 pagesMechanical Engineering Tools, Manufacturing Tools, Design and Manufacturing Calculators Design Reference, GD&T Training Resources - Engineers Edgejohn reyesNo ratings yet
- 021-028 Generator (Alternator) Exciter Rotating Diodes: RemoveDocument5 pages021-028 Generator (Alternator) Exciter Rotating Diodes: RemoveMohamed ZakiNo ratings yet
- Kevin Boone's Web SiteDocument39 pagesKevin Boone's Web SitegarycwkNo ratings yet
- TFM AsselZhaksylykDocument101 pagesTFM AsselZhaksylykAnonymous e3XZzQNo ratings yet
- Class 9 Physics Guess Paper by HOMELANDERDocument33 pagesClass 9 Physics Guess Paper by HOMELANDERjavedroxx4No ratings yet
- L1b - (Live) Introduction - Print-1Document20 pagesL1b - (Live) Introduction - Print-1GGNo ratings yet
- Sample Problems Newton's Laws and Applications PDFDocument3 pagesSample Problems Newton's Laws and Applications PDFrussell valino100% (1)
- Declaration: Wireless Transformer Parameter Monitoring SystemDocument64 pagesDeclaration: Wireless Transformer Parameter Monitoring SystemBelete GetachewNo ratings yet
- Ampere Turn Rating ExplainedDocument2 pagesAmpere Turn Rating ExplainedJaime FuentesNo ratings yet
- Three-Phase Asynchronous Motors For Low Voltage With Squirrel-Cage RotorDocument23 pagesThree-Phase Asynchronous Motors For Low Voltage With Squirrel-Cage Rotorumarbutt99No ratings yet
- 1 Core 33kv CC NewDocument3 pages1 Core 33kv CC NewAnandvikash SinghNo ratings yet
- GravitationalDocument8 pagesGravitationalRathankar RaoNo ratings yet
- Applied Mechanics Department B.E-Sem.-Vi - Earthquake Engineering (160605) ASSIGNMENT - 3: Structural Dynamics (Module I)Document3 pagesApplied Mechanics Department B.E-Sem.-Vi - Earthquake Engineering (160605) ASSIGNMENT - 3: Structural Dynamics (Module I)archan_daveNo ratings yet
- Current Techniques For Tuning Dielectric ResonatorsDocument5 pagesCurrent Techniques For Tuning Dielectric Resonatorskhanafzaal2576No ratings yet
- Beacon of Light (Physics)Document71 pagesBeacon of Light (Physics)Affan Firoz Khan100% (1)
- EEE 332 Summer 2021 Mid PoorDocument9 pagesEEE 332 Summer 2021 Mid PoorAli AshrafNo ratings yet
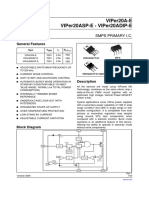
- Viper20A-E Viper20Asp-E - Viper20Adip-E: General FeaturesDocument33 pagesViper20A-E Viper20Asp-E - Viper20Adip-E: General FeaturesAdriánNo ratings yet
- Physics Scheme Class: - Ss1Document4 pagesPhysics Scheme Class: - Ss1Oyovwikigho O. BlessingNo ratings yet