Download as pdf or txt
You might also like
- 545 ct100 INDEXcE1Document26 pages545 ct100 INDEXcE1Roberto FalconeNo ratings yet
- Yzf R15abs 2021Document164 pagesYzf R15abs 2021jairo rey ramirez50% (2)
- Lagoon 44 ManualDocument31 pagesLagoon 44 ManualMattia TerenziNo ratings yet
- ECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPDocument8 pagesECEN 2270 CU Boulder 2013, Electronics Design Lab, Lab2, WIPNunjaNo ratings yet
- Torque SensorDocument6 pagesTorque SensorBayu Ari MurtiNo ratings yet
- Chapter 12Document12 pagesChapter 12bhaskarNo ratings yet
- Control Induction Motor: StrategyDocument8 pagesControl Induction Motor: StrategyMohan MatliNo ratings yet
- Expt 7 Shock Absorber Test RigDocument5 pagesExpt 7 Shock Absorber Test RigRithwik pawarNo ratings yet
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- Brushless MotorsDocument3 pagesBrushless MotorsHossam DawoodNo ratings yet
- 3.3.1 Motor Sizing and Selection 1. Measuring Chamber Sliding Valve Drive Mechanism (A) Determination of The Drive MechanismDocument6 pages3.3.1 Motor Sizing and Selection 1. Measuring Chamber Sliding Valve Drive Mechanism (A) Determination of The Drive MechanismproteuscarrillusNo ratings yet
- P 2 DDocument2 pagesP 2 Dnayyer.sayedshadabNo ratings yet
- Handbook and Application Guide For High-Performance Brushless Servo SystemsDocument26 pagesHandbook and Application Guide For High-Performance Brushless Servo SystemsAnonymous bjXxKrQa6bNo ratings yet
- Anna University Practical Lab Manuals For Engineering StudentsDocument13 pagesAnna University Practical Lab Manuals For Engineering StudentsTinku RathoreNo ratings yet
- Strain Measurement in A Shaft Subjected To TorqueDocument4 pagesStrain Measurement in A Shaft Subjected To TorqueRajarajan NMNo ratings yet
- DC MotorDocument1 pageDC MotorSathish KumarNo ratings yet
- Annals 2013 2 19 PDFDocument4 pagesAnnals 2013 2 19 PDFLohith B.YNo ratings yet
- Back To BackDocument3 pagesBack To BackDragan LazicNo ratings yet
- Optimizing Gap Alarm Settings: ApplicationsDocument5 pagesOptimizing Gap Alarm Settings: ApplicationsMohamed BelallNo ratings yet
- Analysis and Improvement On The Structure of Variable Reluctance ResolversDocument7 pagesAnalysis and Improvement On The Structure of Variable Reluctance ResolversakruNo ratings yet
- Vector ControlDocument5 pagesVector Controlapi-26587237No ratings yet
- Types of TransducersDocument15 pagesTypes of TransducersBGPNo ratings yet
- The Influence of Misalignment On Torque Transducers - A. Brüge Et Al. - 1998Document5 pagesThe Influence of Misalignment On Torque Transducers - A. Brüge Et Al. - 1998viethuong96No ratings yet
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- Ks PaperDocument5 pagesKs PaperSatyam SwarupNo ratings yet
- Ce 2 PDFDocument72 pagesCe 2 PDFDivya RajanNo ratings yet
- Dynamic Balancing ExpDocument10 pagesDynamic Balancing ExpSand Man Out100% (1)
- Static and Dynamic BalancingDocument20 pagesStatic and Dynamic BalancingAmir Mahmoud Mahdavi Abhari100% (2)
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Parameter Identification and Modelling of Separately Excited DC MotorDocument8 pagesParameter Identification and Modelling of Separately Excited DC MotorIJIERT-International Journal of Innovations in Engineering Research and TechnologyNo ratings yet
- Lifting TrainingDocument9 pagesLifting TrainingMohamed OmarNo ratings yet
- Lab 3 - DC Motor Speed Control (MANUAL)Document6 pagesLab 3 - DC Motor Speed Control (MANUAL)kimiNo ratings yet
- E 2 Sin (PN + N), M 2pfo Appn YDocument3 pagesE 2 Sin (PN + N), M 2pfo Appn YDeepak SharmaNo ratings yet
- Stressanalysis - 1 4 Bridge Calibration PDFDocument6 pagesStressanalysis - 1 4 Bridge Calibration PDFGilbertoAndresDuarteNo ratings yet
- Sensors 2017, 17, 469: Figure 10. Flow Chart of The Coordinator NodeDocument9 pagesSensors 2017, 17, 469: Figure 10. Flow Chart of The Coordinator NodeAbhijeet KeerNo ratings yet
- Controller Design For Electric Power Steering System Using T-S Fuzzy Model Approach PDFDocument6 pagesController Design For Electric Power Steering System Using T-S Fuzzy Model Approach PDFsenthilduraiNo ratings yet
- An Serv 002 PDFDocument20 pagesAn Serv 002 PDFMario TapiaNo ratings yet
- DC Motors Explanation 1Document11 pagesDC Motors Explanation 1Isi ObohNo ratings yet
- Design of Transmission ShaftsDocument5 pagesDesign of Transmission ShaftsHadidNo ratings yet
- plugin-9-6-7-2011-10-37-38-MM JournalDocument13 pagesplugin-9-6-7-2011-10-37-38-MM Journalnainesh goteNo ratings yet
- Pulse: Modulated InvertersDocument11 pagesPulse: Modulated InvertersBrahmananda Reddy TeegalaNo ratings yet
- Paper 78Document8 pagesPaper 78Sanker VikramNo ratings yet
- Tension Control by Servo Motor in TextileDocument4 pagesTension Control by Servo Motor in TextileIsmail BayraktarNo ratings yet
- Bearing Stiffness DeterminationDocument11 pagesBearing Stiffness DeterminationSoumya ChatterjeeNo ratings yet
- Influence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationDocument5 pagesInfluence of Essential Dimensions of Rotor Ge-Ometry On Reluctance Torque GenerationBOUZ2010No ratings yet
- Ems TurnitinDocument3 pagesEms Turnitinraion07No ratings yet
- Control Analysis of A Switched Reluctance MotorDocument9 pagesControl Analysis of A Switched Reluctance MotorДејан ПејовскиNo ratings yet
- Sensorless FOC of ACI - 2833xDocument45 pagesSensorless FOC of ACI - 2833xJavier RuizNo ratings yet
- 3.2 Sensors and TransducersDocument38 pages3.2 Sensors and Transducersjohanna shaanyenengeNo ratings yet
- Mem SCH Eng OU 4 65Document9 pagesMem SCH Eng OU 4 65Helga Ines BenzNo ratings yet
- Optimizing Gap Alarm Settings: ApplicationsDocument5 pagesOptimizing Gap Alarm Settings: ApplicationsjunaidNo ratings yet
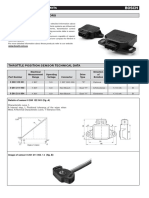
- TPS Especificacoes BOSCH Sensors - ThrottlepositionDocument3 pagesTPS Especificacoes BOSCH Sensors - ThrottlepositionLuiz NogueiraNo ratings yet
- Synchronous Generator TrainerDocument6 pagesSynchronous Generator TrainerBabyNo ratings yet
- A Direct Torque Controlled Induction Motor With Variable Hysteresis BandDocument6 pagesA Direct Torque Controlled Induction Motor With Variable Hysteresis BandMuhammad SaadNo ratings yet
- Name: Danish.M Reg - No: 19BME0737 Subject Code: MEE2004 Subject Title: Slot: L7 + L8 Guided By: Venkatesan KDocument9 pagesName: Danish.M Reg - No: 19BME0737 Subject Code: MEE2004 Subject Title: Slot: L7 + L8 Guided By: Venkatesan KDanish MNo ratings yet
- Tema 1Document14 pagesTema 1Raul Roque YujraNo ratings yet
- Lab 3: Control System Design: Part 1: Introduction and ObjectivesDocument13 pagesLab 3: Control System Design: Part 1: Introduction and Objectivesvince kafuaNo ratings yet
- Rohini - 97679188528.pdf MechatronicsDocument10 pagesRohini - 97679188528.pdf Mechatronicsrampatil290905No ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- [Journal of Agricultural Engineering Research vol. 25 iss. 1] Sjoflot - Big mirrors to improve tractor driver's posture and quality of work (1980)Document9 pages[Journal of Agricultural Engineering Research vol. 25 iss. 1] Sjoflot - Big mirrors to improve tractor driver's posture and quality of work (1980)Sergey ZlenkoNo ratings yet
- Stability and Control of Two-Wheel Drive Tractors and Machinery On Sloping GroundDocument20 pagesStability and Control of Two-Wheel Drive Tractors and Machinery On Sloping GroundSergey ZlenkoNo ratings yet
- The Persistence of The Effects of Simulated Tractor Wheeling On Sandy Loam SubsoilDocument4 pagesThe Persistence of The Effects of Simulated Tractor Wheeling On Sandy Loam SubsoilSergey ZlenkoNo ratings yet
- Tractive Performance of Tractor Drive Tyres: I. The Effect of Lug HeightDocument12 pagesTractive Performance of Tractor Drive Tyres: I. The Effect of Lug HeightSergey ZlenkoNo ratings yet
- An Approach To The Assessment of Tractor Stability On Rough Sloping GroundDocument8 pagesAn Approach To The Assessment of Tractor Stability On Rough Sloping GroundSergey ZlenkoNo ratings yet
- (Journal of Agricultural Engineering Research Vol. 19 Iss. 2) Kolozsi, McCarthy - The Prediction of Tractor Field Performance (1974)Document6 pages(Journal of Agricultural Engineering Research Vol. 19 Iss. 2) Kolozsi, McCarthy - The Prediction of Tractor Field Performance (1974)Sergey ZlenkoNo ratings yet
- An Instrumented Tractor For Use in Motion Behaviour Studies On Sloping GroundDocument6 pagesAn Instrumented Tractor For Use in Motion Behaviour Studies On Sloping GroundSergey ZlenkoNo ratings yet
- Experiments in Improving Tractor Operator Ride by Means of A Cab SuspensionDocument16 pagesExperiments in Improving Tractor Operator Ride by Means of A Cab SuspensionSergey ZlenkoNo ratings yet
- A Field Comparison of The Tractive Performance of Two-And Four-Wheel Drive TractorsDocument9 pagesA Field Comparison of The Tractive Performance of Two-And Four-Wheel Drive TractorsSergey ZlenkoNo ratings yet
- An Investigation of The Potential For Improvement of Tractor Draught ControlsDocument19 pagesAn Investigation of The Potential For Improvement of Tractor Draught ControlsSergey ZlenkoNo ratings yet
- Osborne - A Field Comparison of The Performance of Two - and Four-Wheel Drive and Tracklaying Tractors (1971)Document16 pagesOsborne - A Field Comparison of The Performance of Two - and Four-Wheel Drive and Tracklaying Tractors (1971)Sergey ZlenkoNo ratings yet
- Baker, Collins - A Comparison of Tractor Rear Tyres in Their Resistance To Side Slip (1972)Document7 pagesBaker, Collins - A Comparison of Tractor Rear Tyres in Their Resistance To Side Slip (1972)Sergey ZlenkoNo ratings yet
- Ryan - Automatic Forward Speed Control of Hydrostatic Transmission Tractors (1972)Document31 pagesRyan - Automatic Forward Speed Control of Hydrostatic Transmission Tractors (1972)Sergey ZlenkoNo ratings yet
- Gilfillan - Tractor Behaviour During Motion Uphill. I. Factors Affecting Behaviour (1970)Document15 pagesGilfillan - Tractor Behaviour During Motion Uphill. I. Factors Affecting Behaviour (1970)Sergey ZlenkoNo ratings yet
- Journal of Agricultural Engineering Research Vol. 10 Iss. 1Document3 pagesJournal of Agricultural Engineering Research Vol. 10 Iss. 1Sergey ZlenkoNo ratings yet
- Gilfillan - Tractor Behaviour During Motion Uphill. II. Comparisons of Behaviour (1970)Document8 pagesGilfillan - Tractor Behaviour During Motion Uphill. II. Comparisons of Behaviour (1970)Sergey ZlenkoNo ratings yet
- Makanjuola, Cowell - Optimization of The Lateral Dynamic Behaviour of Tractor Mounted Implements (1970)Document20 pagesMakanjuola, Cowell - Optimization of The Lateral Dynamic Behaviour of Tractor Mounted Implements (1970)Sergey ZlenkoNo ratings yet
- Journal of Agricultural Engineering Research Vol. 13 Iss. 1Document15 pagesJournal of Agricultural Engineering Research Vol. 13 Iss. 1Sergey ZlenkoNo ratings yet
- Journal of Agricultural Engineering Research Vol. 23 Iss. 1Document7 pagesJournal of Agricultural Engineering Research Vol. 23 Iss. 1Sergey ZlenkoNo ratings yet
- Journal of Agricultural Engineering Research Vol. 12 Iss. 3Document4 pagesJournal of Agricultural Engineering Research Vol. 12 Iss. 3Sergey ZlenkoNo ratings yet
- A Stationary Thresher For Experimental Work 1.: WoodDocument2 pagesA Stationary Thresher For Experimental Work 1.: WoodSergey ZlenkoNo ratings yet
- Journal of Agricultural Engineering Research Vol. 12 Iss. 1Document4 pagesJournal of Agricultural Engineering Research Vol. 12 Iss. 1Sergey ZlenkoNo ratings yet
- Using Gan-Based System-In-Packages To Improve Power Converter DesignsDocument45 pagesUsing Gan-Based System-In-Packages To Improve Power Converter DesignsАлексей ЯмаNo ratings yet
- FM 2632 Auto FM 2635 Manual: Key Features Key SpecificationsDocument4 pagesFM 2632 Auto FM 2635 Manual: Key Features Key SpecificationsLucky IntilandNo ratings yet
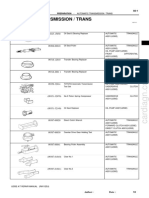
- Automatic Transmission / Trans: PreparationDocument2 pagesAutomatic Transmission / Trans: PreparationDang Tien PhucNo ratings yet
- Dme-II Question BankDocument7 pagesDme-II Question BankenggsantuNo ratings yet
- AOD414 N-Channel Enhancement Mode Field Effect Transistor: Features General DescriptionDocument6 pagesAOD414 N-Channel Enhancement Mode Field Effect Transistor: Features General DescriptionDj-Samuel OliveiraNo ratings yet
- VS-15ETH06FP-N3: Vishay SemiconductorsDocument7 pagesVS-15ETH06FP-N3: Vishay SemiconductorsTony EdsonNo ratings yet
- Compatibility: Modem DetectionDocument56 pagesCompatibility: Modem DetectionHermes Sierralta ToncelNo ratings yet
- Row O-2300s Tech EngDocument2 pagesRow O-2300s Tech EngVirendrapratap SinghNo ratings yet
- Manuel Sherco SEF 450 - 2015Document76 pagesManuel Sherco SEF 450 - 2015Franck RslNo ratings yet
- ES Module1Document42 pagesES Module1Adi NarayanaNo ratings yet
- Dell XPS 15 9500 LA-J191PDocument100 pagesDell XPS 15 9500 LA-J191PDariusz SmętekNo ratings yet
- Catalogo Sauer Danfos Serie 90L130Document88 pagesCatalogo Sauer Danfos Serie 90L130Jose Inga MirandaNo ratings yet
- Invoice KK01Document1 pageInvoice KK01Brahmana SaktiNo ratings yet
- Sony klv-22bx320 22cx320 26bx320 26cx320 32bx320 32bx320 40cx420 Chassis Az2ekDocument47 pagesSony klv-22bx320 22cx320 26bx320 26cx320 32bx320 32bx320 40cx420 Chassis Az2ekBadruddin SariyaNo ratings yet
- Cushion Connector CompressedDocument2 pagesCushion Connector CompressedAndreeNo ratings yet
- Risc and CiscDocument20 pagesRisc and Ciscprathapreddy420No ratings yet
- BCA 131 Computer Fundamentals - (C)Document2 pagesBCA 131 Computer Fundamentals - (C)kshitijaNo ratings yet
- 6A12 Engine ManualDocument70 pages6A12 Engine ManualZeni Alamsyah86% (7)
- M JB 5052300Document1 pageM JB 5052300Claudio Calabrese0% (1)
- Modules - Explanations - SEMIPONT: Semipont, Bridge Rectifiers and AC ControllerDocument8 pagesModules - Explanations - SEMIPONT: Semipont, Bridge Rectifiers and AC ControllerCarlos BrancoNo ratings yet
- Treadmill Service ManualDocument111 pagesTreadmill Service ManualBashar MohammadNo ratings yet
- Haumek - Non Stick CookwareDocument16 pagesHaumek - Non Stick CookwareDeepak JhaNo ratings yet
- Delta Vfd007l21aDocument2 pagesDelta Vfd007l21aCongora PabloNo ratings yet
- Capacities and Specifications GDP25MXDocument14 pagesCapacities and Specifications GDP25MXvicmart3030No ratings yet
- XC7 SR07Document6 pagesXC7 SR07EKKO CONSTRUCTORESNo ratings yet
- Sg250hx in ItrDocument2 pagesSg250hx in Itrimaad quadriNo ratings yet
- Part 2Document49 pagesPart 2Sandro AraújoNo ratings yet
- An-9014-Fairchild QFET For Synchronous Rectification DC To DC Converters - ImpDocument16 pagesAn-9014-Fairchild QFET For Synchronous Rectification DC To DC Converters - ImpbmmostefaNo ratings yet




























































![[Journal of Agricultural Engineering Research vol. 25 iss. 1] Sjoflot - Big mirrors to improve tractor driver's posture and quality of work (1980)](https://imgv2-1-f.scribdassets.com/img/document/747878820/149x198/517b13271f/1720098327?v=1)