Download as pdf or txt
You might also like
- Guidance and Control of Ocean Vehicles-Thor I FossenDocument494 pagesGuidance and Control of Ocean Vehicles-Thor I Fossen孙慧慧100% (13)
- Detailed Lesson Plan in Science 1Document7 pagesDetailed Lesson Plan in Science 1Kate Alonzo LungubNo ratings yet
- Seismology Problem Set 1 4Document11 pagesSeismology Problem Set 1 4Goldy BanerjeeNo ratings yet
- Model Set B (2080)Document6 pagesModel Set B (2080)gautamraman444No ratings yet
- PHAS1247 Classical Mechanics: Exam 2017Document8 pagesPHAS1247 Classical Mechanics: Exam 2017Don QuixoteNo ratings yet
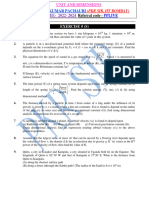
- Old Question-NePhO-2020Document6 pagesOld Question-NePhO-2020राम यादवNo ratings yet
- PHY LAB COMPRE 2015 BITS GOA (Charsichoco)Document4 pagesPHY LAB COMPRE 2015 BITS GOA (Charsichoco)Rishiraj RajkhowaNo ratings yet
- KAS Physics Prelims 2010Document20 pagesKAS Physics Prelims 2010Amjid AliNo ratings yet
- AH Physics 2012Document24 pagesAH Physics 2012pixelhoboNo ratings yet
- a2d6b6ec814c0021f10af204fdaINPhO 2013 QPDocument4 pagesa2d6b6ec814c0021f10af204fdaINPhO 2013 QPriteshdewangan22012006No ratings yet
- Smarandache Curves According To Sabban Frame For Darboux Vector of Mannheim Partner CurveDocument6 pagesSmarandache Curves According To Sabban Frame For Darboux Vector of Mannheim Partner CurveMia AmaliaNo ratings yet
- 3 Basinc Ve Akiskan StatigiDocument7 pages3 Basinc Ve Akiskan Statigiizzet9696No ratings yet
- Physics - I - 2013 - KASMAINS JKPSCDocument4 pagesPhysics - I - 2013 - KASMAINS JKPSCGourav ThakurNo ratings yet
- PHYS130Part1 21-22 FINALDocument3 pagesPHYS130Part1 21-22 FINALnt7gdhzjswNo ratings yet
- Instructions: Enter Your Examination Centre HereDocument4 pagesInstructions: Enter Your Examination Centre HereSarvesh R GuptaNo ratings yet
- Fiitjee: Solutions To JEE (Main) - 2019Document33 pagesFiitjee: Solutions To JEE (Main) - 2019DevanshuNo ratings yet
- Exercise # (S) : Force K LengthDocument12 pagesExercise # (S) : Force K LengthAaryan KeshanNo ratings yet
- Subject: Engineering of Metallurgy: Theoretical Density ComputationsDocument13 pagesSubject: Engineering of Metallurgy: Theoretical Density ComputationskdNo ratings yet
- Aer2007 2211ers1 1 18Document9 pagesAer2007 2211ers1 1 18lightyears4991No ratings yet
- Part - A (Physics) : Jee Main 2019 - 8 April - Evening Shift MathongoDocument41 pagesPart - A (Physics) : Jee Main 2019 - 8 April - Evening Shift MathongoAparaNo ratings yet
- Sos Secondary SchoolDocument6 pagesSos Secondary Schoolsanjayashrestha777No ratings yet
- Advanced Theory of StructureDocument5 pagesAdvanced Theory of StructureMihir SolankiNo ratings yet
- Past 10 Years Paper SortDocument16 pagesPast 10 Years Paper Sortdanyalhaider222333No ratings yet
- SQP Hy 11 2022 23Document13 pagesSQP Hy 11 2022 23It's all About fitnessNo ratings yet
- Physics - I-Phys 1001-2023Document4 pagesPhysics - I-Phys 1001-2023xilag49210No ratings yet
- Indian National Physics Olympiad - 2008Document5 pagesIndian National Physics Olympiad - 2008Vatsal AggarwalNo ratings yet
- 02 Unit Dimensions PC 1668951233128Document11 pages02 Unit Dimensions PC 1668951233128bhimbasuliNo ratings yet
- Index Miller XRDDocument22 pagesIndex Miller XRDAchsan ArfandiNo ratings yet
- AE3010 Aerodynamics and Propulsion 2Document6 pagesAE3010 Aerodynamics and Propulsion 2modellismo2002No ratings yet
- Mid Term 2021 SolutionsDocument3 pagesMid Term 2021 SolutionsSEELAM ALEXANDERNo ratings yet
- This Exam Is Formed of Three Exercises in Four Pages. The Use of Non-Programmable Calculators Is RecommendedDocument6 pagesThis Exam Is Formed of Three Exercises in Four Pages. The Use of Non-Programmable Calculators Is Recommendedincandescentglow96No ratings yet
- Moment of InertiaDocument15 pagesMoment of InertiamotahareshNo ratings yet
- Part - A (Physics) : Jee Main 2019 - 9 April - Evening Shift MathongoDocument38 pagesPart - A (Physics) : Jee Main 2019 - 9 April - Evening Shift Mathongorohit574No ratings yet
- TSP Cmes 37Document10 pagesTSP Cmes 37shashankraomechineniNo ratings yet
- SRSTAR CO SCMODEL A&B Jee Main GTM 1 Q 230103 221716Document22 pagesSRSTAR CO SCMODEL A&B Jee Main GTM 1 Q 230103 221716hs8314073No ratings yet
- KrovvidyAPPhysicsCSummerWork Motion TestDocument13 pagesKrovvidyAPPhysicsCSummerWork Motion Testgrace_lo_1No ratings yet
- Section-I (Single Answer Correct Type)Document6 pagesSection-I (Single Answer Correct Type)pankaj agarwalNo ratings yet
- MME09MM 1101numerical Related To CrystallographyDocument53 pagesMME09MM 1101numerical Related To CrystallographyMaria PhiriNo ratings yet
- Tutorial Sheet 1Document2 pagesTutorial Sheet 1Munangisa LucksonNo ratings yet
- Acp PS1 PDFDocument2 pagesAcp PS1 PDFRyan TraversNo ratings yet
- Govt. Degree College For Boys, Jand Pre-Board Exams (Physics-I)Document4 pagesGovt. Degree College For Boys, Jand Pre-Board Exams (Physics-I)Ghulam FaridNo ratings yet
- Tma BPHCT-131 e 2019-2010Document4 pagesTma BPHCT-131 e 2019-2010vdefbv daefNo ratings yet
- TheoryQues 1995Document8 pagesTheoryQues 1995Shahin AhmedNo ratings yet
- Gupta Theory Longitudinal Photons Quantum Electrodynamics 1950Document12 pagesGupta Theory Longitudinal Photons Quantum Electrodynamics 1950Ulf KleinNo ratings yet
- r/10 V/MS: 82 AL/Structural Question/PDocument7 pagesr/10 V/MS: 82 AL/Structural Question/P林柄洲No ratings yet
- SatOrb ReportV1Document13 pagesSatOrb ReportV1João JúniorNo ratings yet
- University of Cape Town Department of Physics PHY1004W Problem Set 6 To Be Handed In: 10h00, Friday, 12 April 2013Document2 pagesUniversity of Cape Town Department of Physics PHY1004W Problem Set 6 To Be Handed In: 10h00, Friday, 12 April 2013edwardnephNo ratings yet
- Chanakya Vidyalaya STD 11: Physics Unit TestDocument51 pagesChanakya Vidyalaya STD 11: Physics Unit TestANUBHAV ThakurNo ratings yet
- 01 Measurements Tutorial (Solution)Document12 pages01 Measurements Tutorial (Solution)Wee Chee LimNo ratings yet
- Questions IDocument12 pagesQuestions Iopabunny224No ratings yet
- Chapter 9 RotationDocument7 pagesChapter 9 RotationHana Lee Jorel ZekeNo ratings yet
- A2 RevisionDocument10 pagesA2 Revisiongaya8404No ratings yet
- M.SC - Physics - 2017 PDFDocument20 pagesM.SC - Physics - 2017 PDFjaswinder singhNo ratings yet
- 2010 H2 Physics Paper 3 Soln - Updated For StudentsDocument8 pages2010 H2 Physics Paper 3 Soln - Updated For Studentslaslover100% (1)
- Tut12ans 01 PDFDocument7 pagesTut12ans 01 PDFأحمدآلزهوNo ratings yet
- Class 11 Half Yearly (2023-24)Document4 pagesClass 11 Half Yearly (2023-24)shivkarnwal2No ratings yet
- QP 11 12 P Physics Xi P.M.Document7 pagesQP 11 12 P Physics Xi P.M.Harsh ChoudharyNo ratings yet
- School of Computing, Engineering and Mathematics Semester 2 Examinations 2011/2012Document9 pagesSchool of Computing, Engineering and Mathematics Semester 2 Examinations 2011/2012Kish ShenoyNo ratings yet
- Microwave-Propelled Sails and Their ControlDocument6 pagesMicrowave-Propelled Sails and Their ControlmegustalazorraNo ratings yet
- Electron Beam-Specimen Interactions and Simulation Methods in MicroscopyFrom EverandElectron Beam-Specimen Interactions and Simulation Methods in MicroscopyNo ratings yet
- 2022 Assessment Science 8Document4 pages2022 Assessment Science 8Crecencia BasongitNo ratings yet
- SILASTIC™ HV 1551-55P Liquid Silicone Rubber: Features & BenefitsDocument3 pagesSILASTIC™ HV 1551-55P Liquid Silicone Rubber: Features & Benefitsabdulbaset alselwiNo ratings yet
- Basic Electronics IIESDocument210 pagesBasic Electronics IIESAkshay ThokeNo ratings yet
- Master List of Calibration Equp.& Instr.Document8 pagesMaster List of Calibration Equp.& Instr.Balkishan DyavanapellyNo ratings yet
- Design of Slab - Wo Way Slab Design As Per Is - 456 - 2000Document25 pagesDesign of Slab - Wo Way Slab Design As Per Is - 456 - 2000rupesh417No ratings yet
- Formal Proofs of The Pythagorean TheoremDocument2 pagesFormal Proofs of The Pythagorean TheoremLauren EricksonNo ratings yet
- Design Optimization of Electrical Transformer Using Genetic Algorithm Phaengkieo2014Document5 pagesDesign Optimization of Electrical Transformer Using Genetic Algorithm Phaengkieo2014Beurus SamaNo ratings yet
- An Introduction To Wet Gas Flow MeteringDocument28 pagesAn Introduction To Wet Gas Flow MeteringShakeel AhmedNo ratings yet
- Smart SeatDocument5 pagesSmart SeatIJRASETPublicationsNo ratings yet
- Jee Main - 24-01-2023-Shift-1) - 1Document27 pagesJee Main - 24-01-2023-Shift-1) - 1Rohit KumarNo ratings yet
- Asbestos Rules Regulations Title 15Document91 pagesAsbestos Rules Regulations Title 15Hasnain NiazNo ratings yet
- Gauss Divergence TheoremDocument36 pagesGauss Divergence TheoremDARSHAN R.kNo ratings yet
- Chapter 3 - Materials Science Crystal StructuresDocument51 pagesChapter 3 - Materials Science Crystal Structurestjipotjipi mungundaNo ratings yet
- Atlantis - The Lost Continent Finally FoundDocument337 pagesAtlantis - The Lost Continent Finally FoundOff White100% (1)
- Circumference and Area of Circles and Real-World Problems NotesDocument14 pagesCircumference and Area of Circles and Real-World Problems Notesapi-310102170No ratings yet
- Tech Comb 1 To 7Document257 pagesTech Comb 1 To 7Sumit SumanNo ratings yet
- Fluid Mechanics - Module 4 - Part1Document10 pagesFluid Mechanics - Module 4 - Part1Sk Jahidul IslamNo ratings yet
- DLP-6 Week 2 (PART 2)Document6 pagesDLP-6 Week 2 (PART 2)Shari Mayne SEGOVIANo ratings yet
- Physics For Engineer: Work, Energy and PowerDocument35 pagesPhysics For Engineer: Work, Energy and PowerLee TalierNo ratings yet
- Particle Physics HandbookDocument238 pagesParticle Physics HandbookKruthika Sreenivasan 1503No ratings yet
- Lesson 4Document28 pagesLesson 4Manuel SapaoNo ratings yet
- 02 Basic Mechanical Vapor Compression Refrigeration (MVCR) Cycle (Part 1)Document16 pages02 Basic Mechanical Vapor Compression Refrigeration (MVCR) Cycle (Part 1)VinNo ratings yet
- Journal of Crystal Growth: Haoyin Ni, Shijie Lu, Caixia ChenDocument11 pagesJournal of Crystal Growth: Haoyin Ni, Shijie Lu, Caixia ChenvarunNo ratings yet
- Fin Irjmets1660135688-1Document8 pagesFin Irjmets1660135688-1pejmanNo ratings yet
- ELECTRIC CURRENTS IN ORGONE DEVICES (Part 2) - The Journal of Psychiatric Orgone TherapyDocument51 pagesELECTRIC CURRENTS IN ORGONE DEVICES (Part 2) - The Journal of Psychiatric Orgone TherapyRaul CamposNo ratings yet
- Joseph Muscat - Elementary Linear Algebra (Expository Notes) (2009)Document40 pagesJoseph Muscat - Elementary Linear Algebra (Expository Notes) (2009)tiberius innocentiusNo ratings yet
- Warsaw University of TechnologyDocument6 pagesWarsaw University of TechnologyyogagaNo ratings yet
- SCH 101 NotesDocument102 pagesSCH 101 NotesOGEGA KERUBO100% (1)