Download as pdf or txt
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- 12.2 Oracle Service Service Request APIs - 2Document59 pages12.2 Oracle Service Service Request APIs - 2donghoangnguNo ratings yet
- Solving The Colebrook-White Equation With Excel - Excel CalculationsDocument3 pagesSolving The Colebrook-White Equation With Excel - Excel CalculationsTeekay CarterNo ratings yet
- 555 TimerDocument76 pages555 TimersatishNo ratings yet
- 1z0-1085 - Oci-Foundations-Associate-Certification-2020-Study-Guide PDFDocument5 pages1z0-1085 - Oci-Foundations-Associate-Certification-2020-Study-Guide PDFLesile DiezNo ratings yet
- Lecture 5 - PeripheralsDocument17 pagesLecture 5 - PeripheralsGelantuNo ratings yet
- CH 4Document14 pagesCH 4sakuNo ratings yet
- M4Document105 pagesM4Usama SabirNo ratings yet
- Standard Single Purpose Processors: PeripheralsDocument17 pagesStandard Single Purpose Processors: Peripheralskank1234No ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument22 pagesEmbedded Systems Design: A Unified Hardware/Software IntroductionRoland SalloumNo ratings yet
- Lecture 21 03 02 2023 PDFDocument6 pagesLecture 21 03 02 2023 PDFBinita KumariNo ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument17 pagesEmbedded Systems Design: A Unified Hardware/Software Introductiondayat_ridersNo ratings yet
- Lect 07 PDFDocument18 pagesLect 07 PDFVijendra PandeyNo ratings yet
- Embeded System2Document23 pagesEmbeded System2Sheikh NuraniNo ratings yet
- Lesson: Embedded Systems I/O TimersDocument9 pagesLesson: Embedded Systems I/O TimersPuspala ManojkumarNo ratings yet
- Electronics-Communication Engineering Embedded-Systems Timers NotesDocument17 pagesElectronics-Communication Engineering Embedded-Systems Timers NotesSSSSSSSSSSSSNo ratings yet
- The University of Texas at Arlington Timers, Capture/Compare/PWMDocument22 pagesThe University of Texas at Arlington Timers, Capture/Compare/PWMadamwaiz100% (1)
- 06 Nutiny-Nuc029 PWMDocument25 pages06 Nutiny-Nuc029 PWMDharmendra SavaliyaNo ratings yet
- 6 RegistersDocument24 pages6 RegistersPiyooshTripathiNo ratings yet
- Lecture 9 - Ch8 Programming CountersDocument54 pagesLecture 9 - Ch8 Programming CountersAbdul-Aziz MasadNo ratings yet
- Embedded SystemsDocument4 pagesEmbedded SystemsShenniNo ratings yet
- CD4541BCNDocument8 pagesCD4541BCNJesus PelaezNo ratings yet
- Digital Pid Controller Using Microcontroller: Nishant Mishra 02913204914 EEEDocument37 pagesDigital Pid Controller Using Microcontroller: Nishant Mishra 02913204914 EEENishant MishraNo ratings yet
- 74HC HCT193 CNV 2 PDFDocument14 pages74HC HCT193 CNV 2 PDFIrvinRamAltNo ratings yet
- CD54/74HC4059: High-Speed CMOS Logic CMOS Programmable Divide-by-N CounterDocument7 pagesCD54/74HC4059: High-Speed CMOS Logic CMOS Programmable Divide-by-N CounterDanielNo ratings yet
- MPS - Ch09 - AVR - Timer Programming in Assembly and CDocument124 pagesMPS - Ch09 - AVR - Timer Programming in Assembly and CPhương Nghi LiênNo ratings yet
- Sec4 PLCDocument67 pagesSec4 PLCEng ForQ3No ratings yet
- 954 As10 ECC211 2023Document9 pages954 As10 ECC211 2023sourishchandra08No ratings yet
- Product Overview: Ks88-Series MicrocontrollersDocument32 pagesProduct Overview: Ks88-Series MicrocontrollersCesar JakobyNo ratings yet
- Defense MechanismDocument27 pagesDefense MechanismgkkishorekumarNo ratings yet
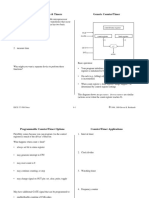
- Programmable Counters & Timers Generic Counter/Timer: Control/status RegisterDocument4 pagesProgrammable Counters & Timers Generic Counter/Timer: Control/status RegisterSNo ratings yet
- Chapter Two: Programmable Logic Controllers (PLC)Document53 pagesChapter Two: Programmable Logic Controllers (PLC)BIRSHNo ratings yet
- Coeng3059:: Digital Logic DesignDocument72 pagesCoeng3059:: Digital Logic DesignALEMU DEMIRACHEWNo ratings yet
- 09 Taking Timing FurtherPIC16F877Document55 pages09 Taking Timing FurtherPIC16F877Abeeesy AmrakeyNo ratings yet
- Motr STM32PDF PDFDocument61 pagesMotr STM32PDF PDFtraineeNo ratings yet
- cd74 hc4059Document11 pagescd74 hc4059parvalhao_No ratings yet
- Dsa 472314Document4 pagesDsa 472314Sitota tesfayeNo ratings yet
- Lecture6 PDFDocument27 pagesLecture6 PDFTanNguyễnNo ratings yet
- 8-10 Design of Asynchronous (Ripple) countersDocument9 pages8-10 Design of Asynchronous (Ripple) countersaryaman dhamijaNo ratings yet
- Counters and Its TypesDocument64 pagesCounters and Its TypesMuhammad noumanNo ratings yet
- PLC 2 FDPDocument52 pagesPLC 2 FDPsadeeskumar.dNo ratings yet
- Dynamic Logic Circuits: Kang and Leblebicic, Chapter 9Document34 pagesDynamic Logic Circuits: Kang and Leblebicic, Chapter 9Lovey SalujaNo ratings yet
- Introduction To IC 555 TimerDocument66 pagesIntroduction To IC 555 TimermuraliNo ratings yet
- Pape 13Document33 pagesPape 13Aayush PatidarNo ratings yet
- In Electronics: Digital Logic Computing Event Process Clock SignalDocument12 pagesIn Electronics: Digital Logic Computing Event Process Clock SignalabhiloveNo ratings yet
- What Is Counter?: Flip-FlopDocument8 pagesWhat Is Counter?: Flip-FlopArunNo ratings yet
- Counters and Shift Registers: - Sipo - PisoDocument52 pagesCounters and Shift Registers: - Sipo - PisoSathish KumarNo ratings yet
- Design of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CDocument25 pagesDesign of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CShuaib Ahmad KhanNo ratings yet
- Static Sequential CircuitsDocument29 pagesStatic Sequential CircuitsfneojwgfjeNo ratings yet
- Digital-Electronics 5Document37 pagesDigital-Electronics 5manavh857No ratings yet
- 555 Timer PDFDocument76 pages555 Timer PDFronaldo19940% (1)
- CountersDocument67 pagesCountersanon_9215003380% (1)
- 555 Timer (Important)Document76 pages555 Timer (Important)money_kandan2004No ratings yet
- Sequential LogicDocument68 pagesSequential LogicbabahussainNo ratings yet
- Chapter 3 - AVR TimersDocument52 pagesChapter 3 - AVR TimersthandowatersonmpilaNo ratings yet
- Timer and InterruptDocument8 pagesTimer and InterruptBelen Septian MDPNo ratings yet
- Counters STDNSDocument18 pagesCounters STDNSmahloko ramatekoaNo ratings yet
- Turbine Governing Scheme Ehtc: R.N.SarangiDocument38 pagesTurbine Governing Scheme Ehtc: R.N.Sarangipallavishraddha100% (3)
- Lecture7 MCU Timers - ADCDocument36 pagesLecture7 MCU Timers - ADCAKSHATA R CNo ratings yet
- Infineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENDocument42 pagesInfineon-Component - PSoC - 4 - Timer - Counter - and - PWM - V1.10-Software Module Datasheets-V02 - 01-ENFatenn BellakhdharNo ratings yet
- 555 TimerDocument76 pages555 TimerSai Krishna KodaliNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Lecture 5 - PeripheralsDocument17 pagesLecture 5 - PeripheralsGelantuNo ratings yet
- Lecture 6 - Digital Camera ExampleDocument47 pagesLecture 6 - Digital Camera ExampleGelantuNo ratings yet
- Chapter 4marketing & Financial PlansDocument85 pagesChapter 4marketing & Financial PlansGelantuNo ratings yet
- Chapter 1 What Is EntrepreneurshipDocument29 pagesChapter 1 What Is EntrepreneurshipGelantuNo ratings yet
- Chapter-2 Business PlanDocument94 pagesChapter-2 Business PlanGelantuNo ratings yet
- Example On CPM and PERTDocument8 pagesExample On CPM and PERTGelantuNo ratings yet
- Material ManagementDocument58 pagesMaterial ManagementGelantuNo ratings yet
- ForcastingDocument97 pagesForcastingGelantuNo ratings yet
- No TitleDocument6 pagesNo Titlehwh8w6jmzsNo ratings yet
- Blockchain Based Cloud Computing Architecture and Research ChallengesDocument16 pagesBlockchain Based Cloud Computing Architecture and Research Challengesunnati srivastavaNo ratings yet
- EN Jabra PanaCast Tech Sheet A4 070722 - WEBDocument1 pageEN Jabra PanaCast Tech Sheet A4 070722 - WEBikponmwosa olotuNo ratings yet
- 2020 Samsung SMART Hospitality Displays: About Samsung Electronics Co., LTDDocument11 pages2020 Samsung SMART Hospitality Displays: About Samsung Electronics Co., LTDAchmad AminNo ratings yet
- Oracle Fusion List of RolesDocument4 pagesOracle Fusion List of RolesC NuNo ratings yet
- 2XVDS ManualDocument226 pages2XVDS ManualNeil McKeeverNo ratings yet
- Overview of Data MiningDocument4 pagesOverview of Data MiningEditor IJTSRDNo ratings yet
- Introduction To FractionsDocument21 pagesIntroduction To FractionsIrene Arbos DalmauNo ratings yet
- What Is Bitcoin (The Summary) 2Document3 pagesWhat Is Bitcoin (The Summary) 2jackNo ratings yet
- Public Key Infrastructure: Vasudev DehalwarDocument16 pagesPublic Key Infrastructure: Vasudev DehalwarShobhit UmraoNo ratings yet
- Designing GDPR Data Protection Principles in Systems DevelopmentDocument8 pagesDesigning GDPR Data Protection Principles in Systems DevelopmentIgor MagalhãesNo ratings yet
- 197 1584793457 PDFDocument6 pages197 1584793457 PDFThadanNo ratings yet
- Class 8 CH 5 Working With QueriesDocument2 pagesClass 8 CH 5 Working With Queriesnilema narendraraje nerkarNo ratings yet
- Ocr Ict A2 Coursework ExamplesDocument4 pagesOcr Ict A2 Coursework Examplesbotav1nakak3100% (2)
- Unit 4. Trigonometric IdentitiesDocument31 pagesUnit 4. Trigonometric IdentitiesKeeno FaustinoNo ratings yet
- HMITemplateSuiteV2 enDocument40 pagesHMITemplateSuiteV2 enSergNo ratings yet
- EICICN 2021 ProceedingDocument178 pagesEICICN 2021 ProceedingsaRIKANo ratings yet
- Stix v2.0 csprd01 Part5 Stix PatterningDocument30 pagesStix v2.0 csprd01 Part5 Stix PatterningRestuNo ratings yet
- Drop BoxDocument4 pagesDrop BoxEduard PatarroyoNo ratings yet
- Outline ITPEC Common Examination From April 2024Document2 pagesOutline ITPEC Common Examination From April 2024Tushar SahaNo ratings yet
- CCTNS MIS CAS Offline Setup Police StationDocument4 pagesCCTNS MIS CAS Offline Setup Police Stationpolice stationNo ratings yet
- Introduction To SDRAMDocument21 pagesIntroduction To SDRAMlng_babie19No ratings yet
- The IoT LoRa System Design For Tracking and Monitoring Patient With Mental DisorderDocument5 pagesThe IoT LoRa System Design For Tracking and Monitoring Patient With Mental DisorderPhuong PuniNo ratings yet
- Design Patterns Concurrency PatternDocument11 pagesDesign Patterns Concurrency Patternhaider aliNo ratings yet
- Peer-to-Peer Network (W-4)Document20 pagesPeer-to-Peer Network (W-4)MuneebNo ratings yet
- Applications of Computers in AccountingDocument17 pagesApplications of Computers in Accountingdebashis1008100% (8)
- Skill Set:: .: Java, Spring MVC, AOP, Spring Boot, J2EE, HTML, and XML. IDE Tool: DatabaseDocument3 pagesSkill Set:: .: Java, Spring MVC, AOP, Spring Boot, J2EE, HTML, and XML. IDE Tool: DatabaseRudrajeet SinghNo ratings yet