Download as pdf or txt
You might also like
- Veloster 2012 1.6LDocument152 pagesVeloster 2012 1.6LArmando Maradiaga100% (2)
- Prius Brake Bleeding ProcedureDocument12 pagesPrius Brake Bleeding ProcedureKhalidParvezNo ratings yet
- DH 500 Part Set - ENDocument68 pagesDH 500 Part Set - ENfatchur rochman100% (3)
- MEO CLASS IV Epariksha - USCG - 3000 QuestionsDocument357 pagesMEO CLASS IV Epariksha - USCG - 3000 Questionsrobetx100% (7)
- Emd Torque ChartDocument5 pagesEmd Torque ChartSubramanyam VangaraNo ratings yet
- Demio (DW) : Mazda 1.3 16V B3Document2 pagesDemio (DW) : Mazda 1.3 16V B3Richard Wilson Mera JaimeNo ratings yet
- Manual de Partes R1300GDocument0 pagesManual de Partes R1300GPercy Chero100% (1)
- Stihl BR 340 420 SR 340 420 Ra 373 00 01 03 PDFDocument66 pagesStihl BR 340 420 SR 340 420 Ra 373 00 01 03 PDFcopperratt7228No ratings yet
- Drawworks TSM 7000 - Rig 14 15Document30 pagesDrawworks TSM 7000 - Rig 14 15Ed CalheNo ratings yet
- Inno2020 - T2 - Screws, Fasteners, and The Design of Non-Permanent JointsDocument22 pagesInno2020 - T2 - Screws, Fasteners, and The Design of Non-Permanent JointsGhostNo ratings yet
- Inno2020 - T1 - Screws, Fasteners, and The Design of Non-Permanent JointsDocument15 pagesInno2020 - T1 - Screws, Fasteners, and The Design of Non-Permanent JointsGhostNo ratings yet
- CH 8: Screws, Fasteners, and The Design of Non-Permanent JointsDocument15 pagesCH 8: Screws, Fasteners, and The Design of Non-Permanent JointsBhuwaneshwar DahalNo ratings yet
- CH 9Document6 pagesCH 9Omar AbdullahNo ratings yet
- Structural Design Guideline For A StructuresDocument24 pagesStructural Design Guideline For A Structuresdesta futeNo ratings yet
- Power Screws Fasteners and Rivted Joints Mech 2011Document12 pagesPower Screws Fasteners and Rivted Joints Mech 2011Eslam Mohamed SayedNo ratings yet
- Chapter III - TorsionDocument19 pagesChapter III - TorsionMostafa Essam Ezzat MahmoudNo ratings yet
- Practise Problems Set04Document5 pagesPractise Problems Set04rohit kumarNo ratings yet
- Beam Design ConceptDocument5 pagesBeam Design ConceptCamille MillangNo ratings yet
- Friction: Syed Shaheer Uddin Ahmed Lecturer, MPE AustDocument19 pagesFriction: Syed Shaheer Uddin Ahmed Lecturer, MPE Austচৌদ্দগ্রাম পৌর আমজনতাNo ratings yet
- Module 3 - TorsionDocument28 pagesModule 3 - TorsionChristianNo ratings yet
- Worked Examples On Torsion in Circular Shafts and Power TransmissionDocument14 pagesWorked Examples On Torsion in Circular Shafts and Power TransmissionWendimu TolessaNo ratings yet
- Module 3 TorsionDocument8 pagesModule 3 TorsionGeri LazaroNo ratings yet
- Unit III - TorsionDocument41 pagesUnit III - TorsionMonesh kumarNo ratings yet
- Simple Stress PDFDocument18 pagesSimple Stress PDFJohn Philip NadalNo ratings yet
- 04 ClutchesDocument26 pages04 Clutcheskishu94737No ratings yet
- MD1 Topic 1 Simple StressesDocument8 pagesMD1 Topic 1 Simple StressesIvan Jeremy AbilaNo ratings yet
- Mechanical SpringsDocument33 pagesMechanical SpringsAhmedOMNo ratings yet
- CH 9Document6 pagesCH 9rammech85No ratings yet
- Power ScrewDocument21 pagesPower Screwstruc-engNo ratings yet
- MODULE-2 Torsion and Bending StressesDocument14 pagesMODULE-2 Torsion and Bending Stressesrhea lee enriquezNo ratings yet
- Lecture Slides: Screws, Fasteners, and The Design of Nonpermanent JointsDocument45 pagesLecture Slides: Screws, Fasteners, and The Design of Nonpermanent JointsAbdulNo ratings yet
- Design of Machine Elements: Nivish GeorgeDocument25 pagesDesign of Machine Elements: Nivish GeorgeVishwa VardhanNo ratings yet
- ShaftsDocument3 pagesShaftsMalibongwe NgcoboNo ratings yet
- Lecture 2 - Tension Members - Part 1Document10 pagesLecture 2 - Tension Members - Part 1Dad MeNo ratings yet
- Power Screw & GearsDocument91 pagesPower Screw & Gearssam0415100% (1)
- RC II Hand Out Chapter 1 - ColumnsDocument30 pagesRC II Hand Out Chapter 1 - ColumnsNathnael JiaNo ratings yet
- RC Design - ACIDocument41 pagesRC Design - ACIAbebe WoldeNo ratings yet
- Lecture 14-15 Screws and Nuts 1Document139 pagesLecture 14-15 Screws and Nuts 1AHMED MSPNo ratings yet
- Chapter 6 ACKulkarniDocument43 pagesChapter 6 ACKulkarnipurijatinNo ratings yet
- Torsion of Circular and Non-Circular ShaftsDocument13 pagesTorsion of Circular and Non-Circular ShaftsJohn CenaNo ratings yet
- Mechanics Tutorial - ClutchesDocument0 pagesMechanics Tutorial - ClutchesBen JohnsonNo ratings yet
- MDB Lesson 8 Helical SpringsDocument10 pagesMDB Lesson 8 Helical Springspoliman2017No ratings yet
- Lecture 1. Shaft DesignDocument18 pagesLecture 1. Shaft DesignhasanNo ratings yet
- Compression MembersDocument4 pagesCompression Membersvincent mark garridoNo ratings yet
- Axial LoadingDocument8 pagesAxial LoadingPrince SinghNo ratings yet
- MD 08 Ch8 FasternersDocument45 pagesMD 08 Ch8 FasternersAbdulNo ratings yet
- BFC 20903 (Mechanics of Materials) Chapter 6: TorsionDocument26 pagesBFC 20903 (Mechanics of Materials) Chapter 6: TorsionHamierul MohamadNo ratings yet
- Unit-1 Principal Stresses Theories of FailureDocument29 pagesUnit-1 Principal Stresses Theories of FailureNarender NarruNo ratings yet
- Power Screws: Source: NPTEL, IIT KGP, Lecture NotesDocument16 pagesPower Screws: Source: NPTEL, IIT KGP, Lecture NotesSubhranil SahaNo ratings yet
- Shear, Bond and TorsionDocument15 pagesShear, Bond and TorsiondantezNo ratings yet
- Torsion of Circular ShaftDocument15 pagesTorsion of Circular Shaftwatersoul.nNo ratings yet
- Chapter 3 - Analysis and Design of Tension Members (Part 1)Document6 pagesChapter 3 - Analysis and Design of Tension Members (Part 1)John Philip NuñezNo ratings yet
- Topic: Fea For Fatigue Life Assessment of Valve Component Subjected To Internal Pressure Loading. (Through Software)Document27 pagesTopic: Fea For Fatigue Life Assessment of Valve Component Subjected To Internal Pressure Loading. (Through Software)tallat0316557No ratings yet
- Machine Design Formula Sheet (Spring - Fastners and Screws)Document9 pagesMachine Design Formula Sheet (Spring - Fastners and Screws)jadhsaayedNo ratings yet
- Design of Machine Element-1Document23 pagesDesign of Machine Element-1rutvikvavale0375No ratings yet
- Couplings Online 2Document9 pagesCouplings Online 2Abdul Rasheed GhaziNo ratings yet
- Lec#8, Stresses in Beam UpdatedDocument46 pagesLec#8, Stresses in Beam Updatedchristianborlaza23No ratings yet
- Flexural Members/Beams: Dr. Hesham A. NumanDocument17 pagesFlexural Members/Beams: Dr. Hesham A. NumanPiolo Lim AvenidoNo ratings yet
- Unit 3Document13 pagesUnit 3pbpawarNo ratings yet
- Torsion IgnouDocument52 pagesTorsion IgnouUBAID KHANNo ratings yet
- Power Screw Sir GDocument34 pagesPower Screw Sir GGodwill EscabelNo ratings yet
- 1-Shaft and Its Design Based On StrengthDocument8 pages1-Shaft and Its Design Based On StrengthJaikishan PandiriNo ratings yet
- DME-Module 6-Ktunotes - inDocument26 pagesDME-Module 6-Ktunotes - inme.nithinchandranNo ratings yet
- Chapter-3 TorsionDocument51 pagesChapter-3 TorsionNaimur Asif BornoNo ratings yet
- Design of Compression MembersDocument18 pagesDesign of Compression MembersWilfharry billyNo ratings yet
- Contact Stress Analysis of Barrel CouplingDocument8 pagesContact Stress Analysis of Barrel CouplingBruno SantosNo ratings yet
- Handout#16Document3 pagesHandout#16Omar AbdullahNo ratings yet
- Handout#21Document1 pageHandout#21Omar AbdullahNo ratings yet
- Chapter 6 Structural AnalysisDocument30 pagesChapter 6 Structural AnalysisOmar AbdullahNo ratings yet
- CH 1-IntroductionDocument15 pagesCH 1-IntroductionOmar AbdullahNo ratings yet
- Common Centroids HandoutDocument2 pagesCommon Centroids HandoutOmar AbdullahNo ratings yet
- Handout#14Document2 pagesHandout#14Omar AbdullahNo ratings yet
- TME331 Fall 2019 - Presentation 1-bDocument19 pagesTME331 Fall 2019 - Presentation 1-bOmar AbdullahNo ratings yet
- Velocity Analysis Using ICsDocument8 pagesVelocity Analysis Using ICsOmar AbdullahNo ratings yet
- DifferentiationDocument5 pagesDifferentiationOmar AbdullahNo ratings yet
- Condensation Process SlidesDocument11 pagesCondensation Process SlidesOmar AbdullahNo ratings yet
- Cross Flow Heat Exchanger SlidesDocument12 pagesCross Flow Heat Exchanger SlidesOmar AbdullahNo ratings yet
- Thermal Conductivity of A Building Material SlidesDocument12 pagesThermal Conductivity of A Building Material SlidesOmar AbdullahNo ratings yet
- Combined Free and Forced Convection and RadiationDocument13 pagesCombined Free and Forced Convection and RadiationOmar AbdullahNo ratings yet
- ExtrusionDocument14 pagesExtrusionOmar AbdullahNo ratings yet
- CH 9Document6 pagesCH 9Omar AbdullahNo ratings yet
- CH 6Document19 pagesCH 6Omar AbdullahNo ratings yet
- DrawingDocument12 pagesDrawingOmar AbdullahNo ratings yet
- Avng Al 01-20Document7 pagesAvng Al 01-20Luis GonzalezNo ratings yet
- Lecture 12Document43 pagesLecture 12salem bahsan100% (1)
- Air Starting System Slide Set 1Document10 pagesAir Starting System Slide Set 1Jigar PatelNo ratings yet
- Centrifugal Pumps Spare Parts 250Document5 pagesCentrifugal Pumps Spare Parts 250Daniel ChiribogaNo ratings yet
- GEARDocument7 pagesGEARLester N. ArgoncilloNo ratings yet
- Echo CS 4200Document17 pagesEcho CS 4200nicolaeNo ratings yet
- Product Template (Product - Template) (Engineering Stocks Only)Document240 pagesProduct Template (Product - Template) (Engineering Stocks Only)SA WOWNo ratings yet
- LuK 0069 enDocument1 pageLuK 0069 enAlanWeissNo ratings yet
- Archivo Adjunto 4Document63 pagesArchivo Adjunto 4Enzo Miguel Sarabia MontesNo ratings yet
- GANTRY DEVIATION STATEMENT-rammohanDocument262 pagesGANTRY DEVIATION STATEMENT-rammohanapparao42No ratings yet
- Aw - A210 ToyotaDocument2 pagesAw - A210 ToyotaApolinar Pineda PinedaNo ratings yet
- Руководство по запчастямDocument894 pagesРуководство по запчастямVikTor100% (1)
- ARCA Info Catalogue GBDocument146 pagesARCA Info Catalogue GBcvfNo ratings yet
- 8992 0113 35 List of PartsDocument69 pages8992 0113 35 List of PartsJuan Carlos Galarza CastilloNo ratings yet
- FG7OR UK VDocument2 pagesFG7OR UK Vjhoar1987No ratings yet
- Pinout Vittara j20Document7 pagesPinout Vittara j20julio montenegroNo ratings yet
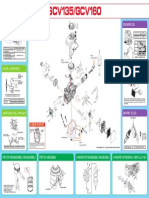
- GCV160 PDFDocument1 pageGCV160 PDFClejeanu MihaelaNo ratings yet
- Mechanism 69869Document28 pagesMechanism 69869Abi DemNo ratings yet
- Theory of Machine - 01Document5 pagesTheory of Machine - 01Ahmed Sobhi l أحمد صبحيNo ratings yet
- Ball Bearings CatalogueDocument40 pagesBall Bearings CatalogueCorneliu TocanNo ratings yet
- Maintenance Instructions For Power SystemDocument3 pagesMaintenance Instructions For Power Systemsanach100% (1)