Download as pdf or txt
You might also like
- B-8 Design of Mini CraneDocument37 pagesB-8 Design of Mini CraneRaj KingNo ratings yet
- Free Energy WaterpumpDocument38 pagesFree Energy WaterpumpDanial FitriNo ratings yet
- J. M. Haile Molecular Dynamics Simulation Elementary Methods 1992Document505 pagesJ. M. Haile Molecular Dynamics Simulation Elementary Methods 1992Anonymous HijNGQtN100% (4)
- Overhead Water Tank - Structural Analysis ReportDocument28 pagesOverhead Water Tank - Structural Analysis Reportcollins unanka100% (3)
- Turbina Kaplan BulboDocument87 pagesTurbina Kaplan BulboJuanRamosNo ratings yet
- SubmarineDocument7 pagesSubmarineAissa Abdoulaye CisseNo ratings yet
- Design and Modeling of RC SubmarineDocument5 pagesDesign and Modeling of RC SubmarineMousa AklNo ratings yet
- The Structure Design of The Mini Underwater Robot: Applied Mechanics and Materials February 2013Document7 pagesThe Structure Design of The Mini Underwater Robot: Applied Mechanics and Materials February 2013Батсайхан ДугаржавNo ratings yet
- DESIGN AND DEVELOPMENT OF RC SUBMARINE - Satridhan - DR - Sumit, MechEng, SRMISTDocument2 pagesDESIGN AND DEVELOPMENT OF RC SUBMARINE - Satridhan - DR - Sumit, MechEng, SRMISTShaan SahNo ratings yet
- Seminarreport On: "Break Water Structure "Document20 pagesSeminarreport On: "Break Water Structure "Anonymous 8YY76gemNo ratings yet
- Design and Development of RC Submarine (Full Abstract)Document9 pagesDesign and Development of RC Submarine (Full Abstract)Shaan SahNo ratings yet
- Final ReportDocument36 pagesFinal ReportRachel McDonnellNo ratings yet
- Design of Low-Cost Unmanned Underwater Vehicle For Shallow WatersDocument13 pagesDesign of Low-Cost Unmanned Underwater Vehicle For Shallow WatersManj UnathNo ratings yet
- Irjet V4i9125Document7 pagesIrjet V4i9125henyNo ratings yet
- UWD Report1Document25 pagesUWD Report1Tanuj SharmaNo ratings yet
- Design and Control of Unmanned Underwater Vehicle: January 2019Document8 pagesDesign and Control of Unmanned Underwater Vehicle: January 2019Burak PalaNo ratings yet
- Design of A Compact ROV For River Exploration: Avilash Sahoo Santosha K. Dwivedy P. S. RobiDocument6 pagesDesign of A Compact ROV For River Exploration: Avilash Sahoo Santosha K. Dwivedy P. S. RobiManuel Diaz Gomez100% (1)
- A Minor Project Report ON: "Solar Tracker Solar Water Heater System"Document59 pagesA Minor Project Report ON: "Solar Tracker Solar Water Heater System"023 ME Rajan ChoudharyNo ratings yet
- Design and Development of Low-Speed Water TunnelDocument7 pagesDesign and Development of Low-Speed Water TunnelIbrahim MadanNo ratings yet
- Development of A Solar-Powered Slider-Crank Mechanism For Hand Pump in Rural AreasDocument9 pagesDevelopment of A Solar-Powered Slider-Crank Mechanism For Hand Pump in Rural AreasPoonam KilaniyaNo ratings yet
- Jsaer2015 02 04 45 54Document10 pagesJsaer2015 02 04 45 54jsaereditorNo ratings yet
- WRE FinalDocument15 pagesWRE FinalNIKHIL PARDESHINo ratings yet
- Design and Construction of An Underwater Robot: September 2017Document5 pagesDesign and Construction of An Underwater Robot: September 2017Kenneth UtiNo ratings yet
- Ashish 21001904001Document17 pagesAshish 21001904001Tanuj SharmaNo ratings yet
- 23hp JRP Kbpintzwatertank1 9-2-2014Document10 pages23hp JRP Kbpintzwatertank1 9-2-2014rajinder_hpiphNo ratings yet
- A_review_of_different_designs_and_control_models_oDocument10 pagesA_review_of_different_designs_and_control_models_oVinay KumarNo ratings yet
- Structural Design of Underwater Drone Using Brushless DC MotorDocument9 pagesStructural Design of Underwater Drone Using Brushless DC MotorIJRASETPublicationsNo ratings yet
- Group No 14 ReportDocument35 pagesGroup No 14 ReportATHARVA KNo ratings yet
- States: Signature of AuthorDocument244 pagesStates: Signature of AuthorTeilorNo ratings yet
- Design of Low-Cost Unmanned Underwater Vehicle For Shallow WatersDocument13 pagesDesign of Low-Cost Unmanned Underwater Vehicle For Shallow WatersBurak PalaNo ratings yet
- Design and Manufacture of Underwater Rov (Remotely Operated Vehicle)Document25 pagesDesign and Manufacture of Underwater Rov (Remotely Operated Vehicle)Albert TomyNo ratings yet
- Yaakob 2012Document9 pagesYaakob 2012Bill Erick CastilloNo ratings yet
- Microcontroller Based Water Level Indicator and ControllerDocument2 pagesMicrocontroller Based Water Level Indicator and ControllerSaikiran RaoNo ratings yet
- Final ReportDocument21 pagesFinal ReportRachel McDonnellNo ratings yet
- Group 9 Final ReportDocument7 pagesGroup 9 Final Reportziziphomkosana2003No ratings yet
- 109ce0038 PDFDocument59 pages109ce0038 PDFEfremWakjiraHodeNo ratings yet
- Conceptual Design of Amphibious Tiltrotor For Rescue Operations: VECTORDocument40 pagesConceptual Design of Amphibious Tiltrotor For Rescue Operations: VECTORvikasnewNo ratings yet
- DownloadDocument39 pagesDownloadJomer SalibioNo ratings yet
- Remote Controlled Rescue Robot For Search Operation PDFDocument4 pagesRemote Controlled Rescue Robot For Search Operation PDFAnonymous j0aewtbQedNo ratings yet
- Darmawan Analysis The Effect of Outrigger (Cadik) VariationsDocument16 pagesDarmawan Analysis The Effect of Outrigger (Cadik) Variationssarjana mudaNo ratings yet
- Review Paper On Design and Fabrication of Remotely Operated Under Water Electric Welding VehicleDocument8 pagesReview Paper On Design and Fabrication of Remotely Operated Under Water Electric Welding VehiclevikasroccksNo ratings yet
- MANUEL 1 SEMINAR LatDocument27 pagesMANUEL 1 SEMINAR Latcrazy hoursNo ratings yet
- Design and Development of An Autonomous UnderwaterDocument6 pagesDesign and Development of An Autonomous UnderwaterayyappadasNo ratings yet
- Chap12 Design and Fabrication of Pumpless Sea Vortex Garbage CollectorDocument19 pagesChap12 Design and Fabrication of Pumpless Sea Vortex Garbage CollectorMico CampoNo ratings yet
- AUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeDocument4 pagesAUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeSachin SharmaNo ratings yet
- Ftkee6 CleanedDocument74 pagesFtkee6 CleanedFarahin MusaNo ratings yet
- Mechanics of Deepwater Steel Catenary Riser: September 2011Document29 pagesMechanics of Deepwater Steel Catenary Riser: September 2011Ashin VargheseNo ratings yet
- KingfishDocument4 pagesKingfishPrashant RanjanNo ratings yet
- Seminar Report - Hydrofoils in CruiserDocument20 pagesSeminar Report - Hydrofoils in Cruiserjestin50% (2)
- A Motion Model of A Remotely Operated Underwater Vehicle CFD SimulationDocument11 pagesA Motion Model of A Remotely Operated Underwater Vehicle CFD Simulationhuy.tranvugia1305No ratings yet
- UWHEPP Nadeem Nafis 1Document3 pagesUWHEPP Nadeem Nafis 1recruitment4rcareerNo ratings yet
- Hydropower Plant Report 4Document17 pagesHydropower Plant Report 4amanyadav8737700No ratings yet
- ProposalDocument12 pagesProposalRahul RahNo ratings yet
- Performance of Type III Stilling Basins Stepped Spillway Studies PDFDocument27 pagesPerformance of Type III Stilling Basins Stepped Spillway Studies PDFAnonymous cncdtlNNo ratings yet
- Advances in Unmanned Underwater Vehicles TechnologDocument15 pagesAdvances in Unmanned Underwater Vehicles TechnologBurak PalaNo ratings yet
- Remote Control HovercraftDocument3 pagesRemote Control HovercraftVIVA-TECH IJRINo ratings yet
- Prediction of Performance and Maneuvering Dynamics For Marine Vehicles Applied To DDG-1000Document80 pagesPrediction of Performance and Maneuvering Dynamics For Marine Vehicles Applied To DDG-1000Eric KulbiejNo ratings yet
- Underwater ConstructionDocument38 pagesUnderwater ConstructionAradhana SinghNo ratings yet
- Introduction To Design and Construction of Deep Manned Submersible "Harmony"Document11 pagesIntroduction To Design and Construction of Deep Manned Submersible "Harmony"Pranesh SBNo ratings yet
- Analysis of An Autonomous Underwater GliderDocument10 pagesAnalysis of An Autonomous Underwater GliderZein Al-Abedeen BarhoumNo ratings yet
- A5052 15mm AlphaDocument1 pageA5052 15mm Alphahoahongdo1998.2907No ratings yet
- Differentiation Applications Curve SketchingDocument26 pagesDifferentiation Applications Curve Sketchingكريم محمد جمعه الخوليNo ratings yet
- KE Units CompDocument7 pagesKE Units CompKhanNo ratings yet
- Ge 104-Topic OutlineDocument6 pagesGe 104-Topic Outlinejustine galonNo ratings yet
- János Kornai - Anti-Equilibrium - On Economic Systems Theory and The Tasks of ResearchDocument424 pagesJános Kornai - Anti-Equilibrium - On Economic Systems Theory and The Tasks of ResearchRobertoNo ratings yet
- 2018IMTA0086 Cougoulic-FlorianDocument146 pages2018IMTA0086 Cougoulic-FlorianBenjamín Medina CarrilloNo ratings yet
- Most Repeated Questions JEEDocument67 pagesMost Repeated Questions JEErajangrNo ratings yet
- S&S Question BankDocument2 pagesS&S Question BankOhol Rohan BhaskarNo ratings yet
- Gary Backhaus - Georg Simmel As An Eidetic SocialDocument13 pagesGary Backhaus - Georg Simmel As An Eidetic SocialJESUS MARMANILLO PEREIRANo ratings yet
- KARAKTERISASI RESERVOIR 2D - TrisaktiDocument215 pagesKARAKTERISASI RESERVOIR 2D - Trisaktirabby jeggoatzeNo ratings yet
- Env Assignment 3Document4 pagesEnv Assignment 3Rose ]SwindellNo ratings yet
- Aashto M332-14Document8 pagesAashto M332-14tony juarezNo ratings yet
- Murakami - Analysis of Stress Intensity Factors of Modes I, II and III For Inclined Surface Cracks of Arbitrary ShapeDocument14 pagesMurakami - Analysis of Stress Intensity Factors of Modes I, II and III For Inclined Surface Cracks of Arbitrary ShapeDavid C HouserNo ratings yet
- Experiment 5: Atterberg Limits TestDocument6 pagesExperiment 5: Atterberg Limits TestMICHELLE AJOY ANAK SAMUEL -No ratings yet
- Paper SPE-206010-msDocument37 pagesPaper SPE-206010-msMursal ZeynallıNo ratings yet
- Calculus - Sheet 2Document5 pagesCalculus - Sheet 2Khaled HashadNo ratings yet
- Class Test - Physics - Magnetism and MatterDocument3 pagesClass Test - Physics - Magnetism and MattermrudulmittalNo ratings yet
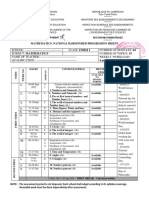
- MATHEMATICS - National Harmonised Progression Sheet. 1st Cycle 2023-2024Document14 pagesMATHEMATICS - National Harmonised Progression Sheet. 1st Cycle 2023-2024Valere DJOHNo ratings yet
- CHEMISTRY 4541/3: Written Practical (2003 - 2020)Document18 pagesCHEMISTRY 4541/3: Written Practical (2003 - 2020)Victoria PetrusNo ratings yet
- CBT Welding QuestionDocument57 pagesCBT Welding QuestionRishiNo ratings yet
- As Further Mechanics 1 June 2022 Shadow Paper MS WordDocument5 pagesAs Further Mechanics 1 June 2022 Shadow Paper MS WordMr DudeeNo ratings yet
- Instrumentation Catalog: PT Arita Prima Indonesia TBKDocument28 pagesInstrumentation Catalog: PT Arita Prima Indonesia TBKKenny YjwNo ratings yet
- Building A Simple Pendulum and Measuring Motion With Arduino and PythonDocument10 pagesBuilding A Simple Pendulum and Measuring Motion With Arduino and PythonSarifudin HusniNo ratings yet
- 11 Evaluation of Damage Area On Low-Velocity Impact TestedDocument5 pages11 Evaluation of Damage Area On Low-Velocity Impact TestedrsrjramNo ratings yet
- Early Sunrice and Delay Sunset: A Physics Project ONDocument12 pagesEarly Sunrice and Delay Sunset: A Physics Project ONYash RathoreNo ratings yet
- 03 무대시설 설계안전지침 PDFDocument86 pages03 무대시설 설계안전지침 PDFNAMIL YANGNo ratings yet
- Bond Strength of Denture Teeth To Heat-Cured, CADCAMDocument7 pagesBond Strength of Denture Teeth To Heat-Cured, CADCAMBharath KondaveetiNo ratings yet
- Astm C133Document6 pagesAstm C133Teddy HariyantoNo ratings yet
- Ma6452 Statistics and Numerical Methods Mathematics IIDocument14 pagesMa6452 Statistics and Numerical Methods Mathematics IITishbian MeshachNo ratings yet