
一种高灵敏度自驱动角度传感器(2.03纳米弧度) 补充信息
一种高灵敏度自驱动角度传感器(2.03纳米弧度) 补充信息
You might also like
- Wind Turbines - Protective Measures - Requirements For Design, Operation and MaintenanceDocument28 pagesWind Turbines - Protective Measures - Requirements For Design, Operation and Maintenancexcv100% (4)
- Service Manual DTL PDFDocument47 pagesService Manual DTL PDFВесна Радин100% (1)
- Rick Cook Wizardry 3 The Wizardry CursedDocument314 pagesRick Cook Wizardry 3 The Wizardry CursedWajahat100% (1)
- Nireco Servojet Sj2: GeneralDocument8 pagesNireco Servojet Sj2: GeneralKen JunNo ratings yet
- Test On Gauss LawDocument3 pagesTest On Gauss Lawsangita07071980No ratings yet
- Physics - Xii - Test 5: Topic - Electric Flux & Gauss LawDocument1 pagePhysics - Xii - Test 5: Topic - Electric Flux & Gauss LawManoj GuptaNo ratings yet
- +4 For Correct,-1 For Wrong 2 HRDocument8 pages+4 For Correct,-1 For Wrong 2 HRRajan TakiarNo ratings yet
- Eklavya Full Test 1 P IIDocument46 pagesEklavya Full Test 1 P IIYogesh KhatriNo ratings yet
- EMF Combine SolDocument37 pagesEMF Combine SolSAYANTAN PALNo ratings yet
- Practice Sheet With SolutionDocument5 pagesPractice Sheet With Solutionvishalray9900No ratings yet
- 117Document11 pages117Mohammad Imran ShafiNo ratings yet
- Are Nuclear and Gavitational Forces of Same NatureDocument12 pagesAre Nuclear and Gavitational Forces of Same NatureCris Villarreal NavarroNo ratings yet
- Holiday - Assignment & Practical WorkDocument15 pagesHoliday - Assignment & Practical WorkAbhi WaliaNo ratings yet
- AlexanderCh16final R1Document19 pagesAlexanderCh16final R1utpNo ratings yet
- Automatic Control CH2Document52 pagesAutomatic Control CH2廖偉丞No ratings yet
- Are Nuclear and Gavitational Forces of Same NatureDocument12 pagesAre Nuclear and Gavitational Forces of Same Naturejpecina2No ratings yet
- LDA 16 ElectrostaticsDocument3 pagesLDA 16 ElectrostaticsAyushmaan SinghNo ratings yet
- Lecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesDocument66 pagesLecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesSrinivas RauNo ratings yet
- Lecture 2 - EMDocument22 pagesLecture 2 - EMKybs nyhuNo ratings yet
- Solutions To The ProblemsDocument1 pageSolutions To The ProblemsSupriyaNo ratings yet
- Assignment 2 ElectrostaticsDocument6 pagesAssignment 2 ElectrostaticsVijay Kumar SharmaNo ratings yet
- 2004 BJP34 684Document3 pages2004 BJP34 684Ewerton CaetanoNo ratings yet
- ElectrostaticsDocument18 pagesElectrostaticsRishi MishraNo ratings yet
- Champ Elect QQD 2014Document20 pagesChamp Elect QQD 2014hhakim32No ratings yet
- Transmission Line Theory: EE3004: Electromagnetic Field TheoryDocument37 pagesTransmission Line Theory: EE3004: Electromagnetic Field TheoryFantasy WorldNo ratings yet
- Find The Electric Field A Distance R From A Line of Positive Charge of Infinite Length and Constant Charge Per Unit LengthDocument32 pagesFind The Electric Field A Distance R From A Line of Positive Charge of Infinite Length and Constant Charge Per Unit Lengthadil sherazNo ratings yet
- Two-Wire Transmission Line Modelling: ABCD Matrix: A Unique Tool For LinearDocument10 pagesTwo-Wire Transmission Line Modelling: ABCD Matrix: A Unique Tool For Linearnaruse10No ratings yet
- Eklavyats-2023-Part Test 1 (Physics) : QuestionsDocument34 pagesEklavyats-2023-Part Test 1 (Physics) : QuestionsSaptarshiNo ratings yet
- Free OscillationsDocument8 pagesFree OscillationsAnonymous 70j56EwNo ratings yet
- (@bohring - Bot) Pks ElectrostatsDocument10 pages(@bohring - Bot) Pks ElectrostatsxkryxxzNo ratings yet
- 3.electromagnetic Theory - GATEDocument29 pages3.electromagnetic Theory - GATEShivpriya.Gupta Btech2022No ratings yet
- ECE 662 - Microwave Electronics: Cross-Field Devices: Magnetrons April 7, 14, 2005Document51 pagesECE 662 - Microwave Electronics: Cross-Field Devices: Magnetrons April 7, 14, 2005Beverly Paman100% (1)
- 2019 Spring Midterm 1 SolutionDocument8 pages2019 Spring Midterm 1 Solutionyulin linNo ratings yet
- 31-12-2323 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-28 - QP FinalDocument22 pages31-12-2323 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-28 - QP Finalholaheg352No ratings yet
- 2017 Spring Mid1 (詳解) -1Document12 pages2017 Spring Mid1 (詳解) -1yulin linNo ratings yet
- 100 MCQSDocument11 pages100 MCQSshiviNo ratings yet
- Circuit EquitionDocument52 pagesCircuit EquitionDhany SSatNo ratings yet
- Voltage Across The Terminals of A Receiving AntennaDocument10 pagesVoltage Across The Terminals of A Receiving Antennadtvt2006No ratings yet
- Energetics in Mazur Mottola Gravistar and Truncated WormholesDocument8 pagesEnergetics in Mazur Mottola Gravistar and Truncated WormholesaritzNo ratings yet
- 12 - JM - P1 - M1 Q 1305CJM202021230001-Allen 070523Document16 pages12 - JM - P1 - M1 Q 1305CJM202021230001-Allen 070523PRITAM KumarNo ratings yet
- 4727-Article Text-8485-1-10-20130718Document15 pages4727-Article Text-8485-1-10-20130718M4gne7icNo ratings yet
- Condensate LayerDocument2 pagesCondensate LayerInne Puspita SariNo ratings yet
- Electrostatics DPP 03 Manish Raj Sir Neet Crash Course RelaunchDocument4 pagesElectrostatics DPP 03 Manish Raj Sir Neet Crash Course Relaunchrajsharmma63No ratings yet
- Electric Charge and Field - DPP 08 - Pragati (PCM) KannadaDocument3 pagesElectric Charge and Field - DPP 08 - Pragati (PCM) Kannadamanojmanu113manuNo ratings yet
- 1er. Parcial 2020-21. Fis1. Univ. ValenciaDocument5 pages1er. Parcial 2020-21. Fis1. Univ. ValenciaFrancisco CrisafulliNo ratings yet
- DPP - 07 - Electrostatics - Potential & Potential EnergyDocument5 pagesDPP - 07 - Electrostatics - Potential & Potential EnergyAnshul AgarwalNo ratings yet
- Holiday Home Work-Occp-Pcm-2023Document30 pagesHoliday Home Work-Occp-Pcm-2023ArnavNo ratings yet
- (@bohring - Bot) 2023-CTS-8 - Special - 26Document11 pages(@bohring - Bot) 2023-CTS-8 - Special - 26becaba3140No ratings yet
- Quantum Physics III (8.06) - Spring 2016 Assignment 6Document5 pagesQuantum Physics III (8.06) - Spring 2016 Assignment 6bahadoor22i5583No ratings yet
- Ds Ds DS: Physics For XIIDocument4 pagesDs Ds DS: Physics For XIIC.p. RawatNo ratings yet
- Final Neet Revision Test-04: PhysicsDocument18 pagesFinal Neet Revision Test-04: PhysicsRussNo ratings yet
- Maxwell-Ampere Law: Free Net FreeDocument9 pagesMaxwell-Ampere Law: Free Net FreeRakesh ChoudharyNo ratings yet
- Electrostatic Precipitator Modeling and SimulationDocument37 pagesElectrostatic Precipitator Modeling and Simulationrushan_razaNo ratings yet
- 2023 EM1 hw3Document3 pages2023 EM1 hw3810003No ratings yet
- Fisika GelombangDocument6 pagesFisika GelombangDwi Puspita SariNo ratings yet
- V01 - Waves On Transmission LinesDocument16 pagesV01 - Waves On Transmission LinesNabil DakhliNo ratings yet
- Full Download Quantum Mechanics 6th Rae Solution Manual PDF Full ChapterDocument36 pagesFull Download Quantum Mechanics 6th Rae Solution Manual PDF Full Chaptertortuous.osmiousr3v45i100% (23)
- Physics: 25 July 2021 (SHIFT - 1) Question With AnswerDocument9 pagesPhysics: 25 July 2021 (SHIFT - 1) Question With Answereliezer hembromNo ratings yet
- Useful constant (MKS) :: Part I. 填充題 (每格 3 分, 共 75 分)Document4 pagesUseful constant (MKS) :: Part I. 填充題 (每格 3 分, 共 75 分)no loo seNo ratings yet
- Ncert Booster Test SeriesDocument24 pagesNcert Booster Test SeriesEr SirNo ratings yet
- MT 1 El 27 05 2024Document12 pagesMT 1 El 27 05 2024MELON HUSKNo ratings yet
- 3.electromagnetic Theory - GATE PDFDocument29 pages3.electromagnetic Theory - GATE PDFKunal kumarNo ratings yet
- Critic Angle Number 8Document5 pagesCritic Angle Number 8Miguel MagallanesNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Super-Resolution Imaging of Low-Contrast Periodic NanoparticleDocument6 pagesSuper-Resolution Imaging of Low-Contrast Periodic Nanoparticle123No ratings yet
- Electron Transfer in Nanoscale Contact Electrification: Effect of Temperature in The Metal-Dielectric CaseDocument9 pagesElectron Transfer in Nanoscale Contact Electrification: Effect of Temperature in The Metal-Dielectric Case123No ratings yet
- 补充信息 离子注入实现的三波电纳米发电机最大表面电荷密度Document11 pages补充信息 离子注入实现的三波电纳米发电机最大表面电荷密度123No ratings yet
- 提高摩擦起电以及利用真空环境避免空气击穿Document9 pages提高摩擦起电以及利用真空环境避免空气击穿123No ratings yet
- Nano Energy: Zixuan Zhang, Qiongfeng Shi, Tianyiyi He, Xinge Guo, Bowei Dong, Jason Lee, Chengkuo LeeDocument13 pagesNano Energy: Zixuan Zhang, Qiongfeng Shi, Tianyiyi He, Xinge Guo, Bowei Dong, Jason Lee, Chengkuo Lee123No ratings yet
- 通过低能氦离子辐照植入操纵聚合物的三波电表面电荷密度Document12 pages通过低能氦离子辐照植入操纵聚合物的三波电表面电荷密度123No ratings yet
- Functionalized Wood With Tunable Tribopolarity For Efficient Triboelectric NanogeneratorsDocument37 pagesFunctionalized Wood With Tunable Tribopolarity For Efficient Triboelectric Nanogenerators123No ratings yet
- 运动捕捉和能量收集 下肢系统Document16 pages运动捕捉和能量收集 下肢系统123No ratings yet
- 能量转换 电子表显示Document10 pages能量转换 电子表显示123No ratings yet
- 水下旗状纳米摩擦发电机Document10 pages水下旗状纳米摩擦发电机123No ratings yet
- Interfacial Laser-Induced Graphene Enabling High-Performance Liquid Solid Triboelectric NanogeneratorDocument9 pagesInterfacial Laser-Induced Graphene Enabling High-Performance Liquid Solid Triboelectric Nanogenerator123No ratings yet
- Nano EnergyDocument10 pagesNano Energy123No ratings yet
- 0.6 mm的最小分辨率滑动栅格-补充信息Document27 pages0.6 mm的最小分辨率滑动栅格-补充信息123No ratings yet
- 空气击穿Document16 pages空气击穿123No ratings yet
- Recent Progress in Self-Powered Multifunctional E-Skin For Advanced ApplicationsDocument24 pagesRecent Progress in Self-Powered Multifunctional E-Skin For Advanced Applications123No ratings yet
- Nano Energy: Quan Zhang, Long Li, Tianhong Wang, Yichen Jiang, Yingzhong Tian, Tao Jin, Tao Yue, Chengkuo LeeDocument11 pagesNano Energy: Quan Zhang, Long Li, Tianhong Wang, Yichen Jiang, Yingzhong Tian, Tao Jin, Tao Yue, Chengkuo Lee123No ratings yet
- 0.6 mm的最小分辨率滑动栅格Document11 pages0.6 mm的最小分辨率滑动栅格123No ratings yet
- Stretchable, Washable, and Ultrathin TriboelectricDocument9 pagesStretchable, Washable, and Ultrathin Triboelectric123No ratings yet
- VISCOELASTICITY Power Point PresentationDocument26 pagesVISCOELASTICITY Power Point PresentationNathaly CuasialpudNo ratings yet
- Tank Bottoms in Atmospheric Storage TanksDocument5 pagesTank Bottoms in Atmospheric Storage TankslsatchithananthanNo ratings yet
- Circular Current LoopDocument4 pagesCircular Current LoopSenki AlphonsNo ratings yet
- BOQ of Material For Fire Hydrant Detection and Foam SystemDocument5 pagesBOQ of Material For Fire Hydrant Detection and Foam SystemSizerCircuitNo ratings yet
- Deepwater NautilusDocument2 pagesDeepwater NautilusJonathan LesmanaNo ratings yet
- Physics 10 Esguerra LE 1 Study Guide 2s 2018 2019Document2 pagesPhysics 10 Esguerra LE 1 Study Guide 2s 2018 2019Mikaela Jlouis MirandaNo ratings yet
- Script 1Document2 pagesScript 1Nor Jhon BruzonNo ratings yet
- Chapter 1 Electromechanical Energy Conversion-SlidesDocument64 pagesChapter 1 Electromechanical Energy Conversion-SlidesAbdulQadir SagirNo ratings yet
- ZnMgO Thin FilmDocument7 pagesZnMgO Thin FilmastridNo ratings yet
- WS15 Calculating Moles Mass and MR Bronze Activity SheetDocument4 pagesWS15 Calculating Moles Mass and MR Bronze Activity SheetHakim AbbasNo ratings yet
- Statically Indeterminate MembersDocument74 pagesStatically Indeterminate MembersAs fans AwanNo ratings yet
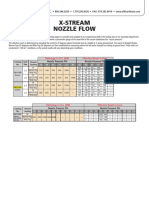
- X-Stream Nozzle Flow: Discharge in U.S. GPM Effective Reach in FeetDocument1 pageX-Stream Nozzle Flow: Discharge in U.S. GPM Effective Reach in FeetSaber ElkassasNo ratings yet
- SputteringDocument17 pagesSputteringTonmoy PaulNo ratings yet
- Hoja Técnica Asco 2000 - Modelo 2500 - 100 KW - V2Document2 pagesHoja Técnica Asco 2000 - Modelo 2500 - 100 KW - V2Hernán Peñafiel ReaNo ratings yet
- Low Temperature Physics MSI 2022Document4 pagesLow Temperature Physics MSI 2022Ioseb MetskhvarishviliNo ratings yet
- DUST COLLECTOR Dustresa - CatalogDocument20 pagesDUST COLLECTOR Dustresa - CatalogDennis Clyde AcantiladoNo ratings yet
- Multiple-Kilowatt-Class Graphite Heater For Large Hollow Cathode IgnitionDocument12 pagesMultiple-Kilowatt-Class Graphite Heater For Large Hollow Cathode IgnitionMADDI MADHAV.No ratings yet
- Acid Catalysis by Heteropolyacids: Transformations of AlkanesDocument13 pagesAcid Catalysis by Heteropolyacids: Transformations of Alkanes20210311098 Febry Dwi LestariNo ratings yet
- 2010 Confinement of Deep Beam Nodal RegionsDocument9 pages2010 Confinement of Deep Beam Nodal RegionsKhNo ratings yet
- 3 Gardner Denver Compressor Bulletin 13-9-209 - 2nd - 9-03Document2 pages3 Gardner Denver Compressor Bulletin 13-9-209 - 2nd - 9-03Sebastian SalazarNo ratings yet
- The Flash: Hero or Villain? by C. Checklin, R. Miller, J. A. Farrow, and J. HueDocument2 pagesThe Flash: Hero or Villain? by C. Checklin, R. Miller, J. A. Farrow, and J. HueActuaLitté100% (1)
- ETR Junction Box-Switchgear Not Required (OP, WT, OS)Document25 pagesETR Junction Box-Switchgear Not Required (OP, WT, OS)Richard ChuaNo ratings yet
- 650 J. H. Jones.: The Quantum Theory and The Dielectric ConstantDocument12 pages650 J. H. Jones.: The Quantum Theory and The Dielectric ConstantAlesia SakuNo ratings yet
- For More Information Please Call 231-399-0700: Addendum To Parts ListDocument5 pagesFor More Information Please Call 231-399-0700: Addendum To Parts ListJosh PiersmaNo ratings yet
- Catalog enDocument40 pagesCatalog enعبدالقادرادم محمدNo ratings yet
- Gas Pressure Regulator RS 250 / RS 251: Product InformationDocument28 pagesGas Pressure Regulator RS 250 / RS 251: Product InformationAdilson Melo de MouraNo ratings yet











































































































Download as pdf or txt
You might also like
- Wind Turbines - Protective Measures - Requirements For Design, Operation and MaintenanceDocument28 pagesWind Turbines - Protective Measures - Requirements For Design, Operation and Maintenancexcv100% (4)
- Service Manual DTL PDFDocument47 pagesService Manual DTL PDFВесна Радин100% (1)
- Rick Cook Wizardry 3 The Wizardry CursedDocument314 pagesRick Cook Wizardry 3 The Wizardry CursedWajahat100% (1)
- Nireco Servojet Sj2: GeneralDocument8 pagesNireco Servojet Sj2: GeneralKen JunNo ratings yet
- Test On Gauss LawDocument3 pagesTest On Gauss Lawsangita07071980No ratings yet
- Physics - Xii - Test 5: Topic - Electric Flux & Gauss LawDocument1 pagePhysics - Xii - Test 5: Topic - Electric Flux & Gauss LawManoj GuptaNo ratings yet
- +4 For Correct,-1 For Wrong 2 HRDocument8 pages+4 For Correct,-1 For Wrong 2 HRRajan TakiarNo ratings yet
- Eklavya Full Test 1 P IIDocument46 pagesEklavya Full Test 1 P IIYogesh KhatriNo ratings yet
- EMF Combine SolDocument37 pagesEMF Combine SolSAYANTAN PALNo ratings yet
- Practice Sheet With SolutionDocument5 pagesPractice Sheet With Solutionvishalray9900No ratings yet
- 117Document11 pages117Mohammad Imran ShafiNo ratings yet
- Are Nuclear and Gavitational Forces of Same NatureDocument12 pagesAre Nuclear and Gavitational Forces of Same NatureCris Villarreal NavarroNo ratings yet
- Holiday - Assignment & Practical WorkDocument15 pagesHoliday - Assignment & Practical WorkAbhi WaliaNo ratings yet
- AlexanderCh16final R1Document19 pagesAlexanderCh16final R1utpNo ratings yet
- Automatic Control CH2Document52 pagesAutomatic Control CH2廖偉丞No ratings yet
- Are Nuclear and Gavitational Forces of Same NatureDocument12 pagesAre Nuclear and Gavitational Forces of Same Naturejpecina2No ratings yet
- LDA 16 ElectrostaticsDocument3 pagesLDA 16 ElectrostaticsAyushmaan SinghNo ratings yet
- Lecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesDocument66 pagesLecture Notes For MA5NO Cohomology, Connections, Curvature and Characteristic ClassesSrinivas RauNo ratings yet
- Lecture 2 - EMDocument22 pagesLecture 2 - EMKybs nyhuNo ratings yet
- Solutions To The ProblemsDocument1 pageSolutions To The ProblemsSupriyaNo ratings yet
- Assignment 2 ElectrostaticsDocument6 pagesAssignment 2 ElectrostaticsVijay Kumar SharmaNo ratings yet
- 2004 BJP34 684Document3 pages2004 BJP34 684Ewerton CaetanoNo ratings yet
- ElectrostaticsDocument18 pagesElectrostaticsRishi MishraNo ratings yet
- Champ Elect QQD 2014Document20 pagesChamp Elect QQD 2014hhakim32No ratings yet
- Transmission Line Theory: EE3004: Electromagnetic Field TheoryDocument37 pagesTransmission Line Theory: EE3004: Electromagnetic Field TheoryFantasy WorldNo ratings yet
- Find The Electric Field A Distance R From A Line of Positive Charge of Infinite Length and Constant Charge Per Unit LengthDocument32 pagesFind The Electric Field A Distance R From A Line of Positive Charge of Infinite Length and Constant Charge Per Unit Lengthadil sherazNo ratings yet
- Two-Wire Transmission Line Modelling: ABCD Matrix: A Unique Tool For LinearDocument10 pagesTwo-Wire Transmission Line Modelling: ABCD Matrix: A Unique Tool For Linearnaruse10No ratings yet
- Eklavyats-2023-Part Test 1 (Physics) : QuestionsDocument34 pagesEklavyats-2023-Part Test 1 (Physics) : QuestionsSaptarshiNo ratings yet
- Free OscillationsDocument8 pagesFree OscillationsAnonymous 70j56EwNo ratings yet
- (@bohring - Bot) Pks ElectrostatsDocument10 pages(@bohring - Bot) Pks ElectrostatsxkryxxzNo ratings yet
- 3.electromagnetic Theory - GATEDocument29 pages3.electromagnetic Theory - GATEShivpriya.Gupta Btech2022No ratings yet
- ECE 662 - Microwave Electronics: Cross-Field Devices: Magnetrons April 7, 14, 2005Document51 pagesECE 662 - Microwave Electronics: Cross-Field Devices: Magnetrons April 7, 14, 2005Beverly Paman100% (1)
- 2019 Spring Midterm 1 SolutionDocument8 pages2019 Spring Midterm 1 Solutionyulin linNo ratings yet
- 31-12-2323 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-28 - QP FinalDocument22 pages31-12-2323 - JR - Star Co-Sc (Model-B) - Jee - Main - CTM-28 - QP Finalholaheg352No ratings yet
- 2017 Spring Mid1 (詳解) -1Document12 pages2017 Spring Mid1 (詳解) -1yulin linNo ratings yet
- 100 MCQSDocument11 pages100 MCQSshiviNo ratings yet
- Circuit EquitionDocument52 pagesCircuit EquitionDhany SSatNo ratings yet
- Voltage Across The Terminals of A Receiving AntennaDocument10 pagesVoltage Across The Terminals of A Receiving Antennadtvt2006No ratings yet
- Energetics in Mazur Mottola Gravistar and Truncated WormholesDocument8 pagesEnergetics in Mazur Mottola Gravistar and Truncated WormholesaritzNo ratings yet
- 12 - JM - P1 - M1 Q 1305CJM202021230001-Allen 070523Document16 pages12 - JM - P1 - M1 Q 1305CJM202021230001-Allen 070523PRITAM KumarNo ratings yet
- 4727-Article Text-8485-1-10-20130718Document15 pages4727-Article Text-8485-1-10-20130718M4gne7icNo ratings yet
- Condensate LayerDocument2 pagesCondensate LayerInne Puspita SariNo ratings yet
- Electrostatics DPP 03 Manish Raj Sir Neet Crash Course RelaunchDocument4 pagesElectrostatics DPP 03 Manish Raj Sir Neet Crash Course Relaunchrajsharmma63No ratings yet
- Electric Charge and Field - DPP 08 - Pragati (PCM) KannadaDocument3 pagesElectric Charge and Field - DPP 08 - Pragati (PCM) Kannadamanojmanu113manuNo ratings yet
- 1er. Parcial 2020-21. Fis1. Univ. ValenciaDocument5 pages1er. Parcial 2020-21. Fis1. Univ. ValenciaFrancisco CrisafulliNo ratings yet
- DPP - 07 - Electrostatics - Potential & Potential EnergyDocument5 pagesDPP - 07 - Electrostatics - Potential & Potential EnergyAnshul AgarwalNo ratings yet
- Holiday Home Work-Occp-Pcm-2023Document30 pagesHoliday Home Work-Occp-Pcm-2023ArnavNo ratings yet
- (@bohring - Bot) 2023-CTS-8 - Special - 26Document11 pages(@bohring - Bot) 2023-CTS-8 - Special - 26becaba3140No ratings yet
- Quantum Physics III (8.06) - Spring 2016 Assignment 6Document5 pagesQuantum Physics III (8.06) - Spring 2016 Assignment 6bahadoor22i5583No ratings yet
- Ds Ds DS: Physics For XIIDocument4 pagesDs Ds DS: Physics For XIIC.p. RawatNo ratings yet
- Final Neet Revision Test-04: PhysicsDocument18 pagesFinal Neet Revision Test-04: PhysicsRussNo ratings yet
- Maxwell-Ampere Law: Free Net FreeDocument9 pagesMaxwell-Ampere Law: Free Net FreeRakesh ChoudharyNo ratings yet
- Electrostatic Precipitator Modeling and SimulationDocument37 pagesElectrostatic Precipitator Modeling and Simulationrushan_razaNo ratings yet
- 2023 EM1 hw3Document3 pages2023 EM1 hw3810003No ratings yet
- Fisika GelombangDocument6 pagesFisika GelombangDwi Puspita SariNo ratings yet
- V01 - Waves On Transmission LinesDocument16 pagesV01 - Waves On Transmission LinesNabil DakhliNo ratings yet
- Full Download Quantum Mechanics 6th Rae Solution Manual PDF Full ChapterDocument36 pagesFull Download Quantum Mechanics 6th Rae Solution Manual PDF Full Chaptertortuous.osmiousr3v45i100% (23)
- Physics: 25 July 2021 (SHIFT - 1) Question With AnswerDocument9 pagesPhysics: 25 July 2021 (SHIFT - 1) Question With Answereliezer hembromNo ratings yet
- Useful constant (MKS) :: Part I. 填充題 (每格 3 分, 共 75 分)Document4 pagesUseful constant (MKS) :: Part I. 填充題 (每格 3 分, 共 75 分)no loo seNo ratings yet
- Ncert Booster Test SeriesDocument24 pagesNcert Booster Test SeriesEr SirNo ratings yet
- MT 1 El 27 05 2024Document12 pagesMT 1 El 27 05 2024MELON HUSKNo ratings yet
- 3.electromagnetic Theory - GATE PDFDocument29 pages3.electromagnetic Theory - GATE PDFKunal kumarNo ratings yet
- Critic Angle Number 8Document5 pagesCritic Angle Number 8Miguel MagallanesNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Super-Resolution Imaging of Low-Contrast Periodic NanoparticleDocument6 pagesSuper-Resolution Imaging of Low-Contrast Periodic Nanoparticle123No ratings yet
- Electron Transfer in Nanoscale Contact Electrification: Effect of Temperature in The Metal-Dielectric CaseDocument9 pagesElectron Transfer in Nanoscale Contact Electrification: Effect of Temperature in The Metal-Dielectric Case123No ratings yet
- 补充信息 离子注入实现的三波电纳米发电机最大表面电荷密度Document11 pages补充信息 离子注入实现的三波电纳米发电机最大表面电荷密度123No ratings yet
- 提高摩擦起电以及利用真空环境避免空气击穿Document9 pages提高摩擦起电以及利用真空环境避免空气击穿123No ratings yet
- Nano Energy: Zixuan Zhang, Qiongfeng Shi, Tianyiyi He, Xinge Guo, Bowei Dong, Jason Lee, Chengkuo LeeDocument13 pagesNano Energy: Zixuan Zhang, Qiongfeng Shi, Tianyiyi He, Xinge Guo, Bowei Dong, Jason Lee, Chengkuo Lee123No ratings yet
- 通过低能氦离子辐照植入操纵聚合物的三波电表面电荷密度Document12 pages通过低能氦离子辐照植入操纵聚合物的三波电表面电荷密度123No ratings yet
- Functionalized Wood With Tunable Tribopolarity For Efficient Triboelectric NanogeneratorsDocument37 pagesFunctionalized Wood With Tunable Tribopolarity For Efficient Triboelectric Nanogenerators123No ratings yet
- 运动捕捉和能量收集 下肢系统Document16 pages运动捕捉和能量收集 下肢系统123No ratings yet
- 能量转换 电子表显示Document10 pages能量转换 电子表显示123No ratings yet
- 水下旗状纳米摩擦发电机Document10 pages水下旗状纳米摩擦发电机123No ratings yet
- Interfacial Laser-Induced Graphene Enabling High-Performance Liquid Solid Triboelectric NanogeneratorDocument9 pagesInterfacial Laser-Induced Graphene Enabling High-Performance Liquid Solid Triboelectric Nanogenerator123No ratings yet
- Nano EnergyDocument10 pagesNano Energy123No ratings yet
- 0.6 mm的最小分辨率滑动栅格-补充信息Document27 pages0.6 mm的最小分辨率滑动栅格-补充信息123No ratings yet
- 空气击穿Document16 pages空气击穿123No ratings yet
- Recent Progress in Self-Powered Multifunctional E-Skin For Advanced ApplicationsDocument24 pagesRecent Progress in Self-Powered Multifunctional E-Skin For Advanced Applications123No ratings yet
- Nano Energy: Quan Zhang, Long Li, Tianhong Wang, Yichen Jiang, Yingzhong Tian, Tao Jin, Tao Yue, Chengkuo LeeDocument11 pagesNano Energy: Quan Zhang, Long Li, Tianhong Wang, Yichen Jiang, Yingzhong Tian, Tao Jin, Tao Yue, Chengkuo Lee123No ratings yet
- 0.6 mm的最小分辨率滑动栅格Document11 pages0.6 mm的最小分辨率滑动栅格123No ratings yet
- Stretchable, Washable, and Ultrathin TriboelectricDocument9 pagesStretchable, Washable, and Ultrathin Triboelectric123No ratings yet
- VISCOELASTICITY Power Point PresentationDocument26 pagesVISCOELASTICITY Power Point PresentationNathaly CuasialpudNo ratings yet
- Tank Bottoms in Atmospheric Storage TanksDocument5 pagesTank Bottoms in Atmospheric Storage TankslsatchithananthanNo ratings yet
- Circular Current LoopDocument4 pagesCircular Current LoopSenki AlphonsNo ratings yet
- BOQ of Material For Fire Hydrant Detection and Foam SystemDocument5 pagesBOQ of Material For Fire Hydrant Detection and Foam SystemSizerCircuitNo ratings yet
- Deepwater NautilusDocument2 pagesDeepwater NautilusJonathan LesmanaNo ratings yet
- Physics 10 Esguerra LE 1 Study Guide 2s 2018 2019Document2 pagesPhysics 10 Esguerra LE 1 Study Guide 2s 2018 2019Mikaela Jlouis MirandaNo ratings yet
- Script 1Document2 pagesScript 1Nor Jhon BruzonNo ratings yet
- Chapter 1 Electromechanical Energy Conversion-SlidesDocument64 pagesChapter 1 Electromechanical Energy Conversion-SlidesAbdulQadir SagirNo ratings yet
- ZnMgO Thin FilmDocument7 pagesZnMgO Thin FilmastridNo ratings yet
- WS15 Calculating Moles Mass and MR Bronze Activity SheetDocument4 pagesWS15 Calculating Moles Mass and MR Bronze Activity SheetHakim AbbasNo ratings yet
- Statically Indeterminate MembersDocument74 pagesStatically Indeterminate MembersAs fans AwanNo ratings yet
- X-Stream Nozzle Flow: Discharge in U.S. GPM Effective Reach in FeetDocument1 pageX-Stream Nozzle Flow: Discharge in U.S. GPM Effective Reach in FeetSaber ElkassasNo ratings yet
- SputteringDocument17 pagesSputteringTonmoy PaulNo ratings yet
- Hoja Técnica Asco 2000 - Modelo 2500 - 100 KW - V2Document2 pagesHoja Técnica Asco 2000 - Modelo 2500 - 100 KW - V2Hernán Peñafiel ReaNo ratings yet
- Low Temperature Physics MSI 2022Document4 pagesLow Temperature Physics MSI 2022Ioseb MetskhvarishviliNo ratings yet
- DUST COLLECTOR Dustresa - CatalogDocument20 pagesDUST COLLECTOR Dustresa - CatalogDennis Clyde AcantiladoNo ratings yet
- Multiple-Kilowatt-Class Graphite Heater For Large Hollow Cathode IgnitionDocument12 pagesMultiple-Kilowatt-Class Graphite Heater For Large Hollow Cathode IgnitionMADDI MADHAV.No ratings yet
- Acid Catalysis by Heteropolyacids: Transformations of AlkanesDocument13 pagesAcid Catalysis by Heteropolyacids: Transformations of Alkanes20210311098 Febry Dwi LestariNo ratings yet
- 2010 Confinement of Deep Beam Nodal RegionsDocument9 pages2010 Confinement of Deep Beam Nodal RegionsKhNo ratings yet
- 3 Gardner Denver Compressor Bulletin 13-9-209 - 2nd - 9-03Document2 pages3 Gardner Denver Compressor Bulletin 13-9-209 - 2nd - 9-03Sebastian SalazarNo ratings yet
- The Flash: Hero or Villain? by C. Checklin, R. Miller, J. A. Farrow, and J. HueDocument2 pagesThe Flash: Hero or Villain? by C. Checklin, R. Miller, J. A. Farrow, and J. HueActuaLitté100% (1)
- ETR Junction Box-Switchgear Not Required (OP, WT, OS)Document25 pagesETR Junction Box-Switchgear Not Required (OP, WT, OS)Richard ChuaNo ratings yet
- 650 J. H. Jones.: The Quantum Theory and The Dielectric ConstantDocument12 pages650 J. H. Jones.: The Quantum Theory and The Dielectric ConstantAlesia SakuNo ratings yet
- For More Information Please Call 231-399-0700: Addendum To Parts ListDocument5 pagesFor More Information Please Call 231-399-0700: Addendum To Parts ListJosh PiersmaNo ratings yet
- Catalog enDocument40 pagesCatalog enعبدالقادرادم محمدNo ratings yet
- Gas Pressure Regulator RS 250 / RS 251: Product InformationDocument28 pagesGas Pressure Regulator RS 250 / RS 251: Product InformationAdilson Melo de MouraNo ratings yet