Download as pdf or txt
You might also like
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Opl 3 DatabaseDocument19 pagesOpl 3 Databasedeep_sorari7No ratings yet
- Customer Specific Requirements MatrixDocument4 pagesCustomer Specific Requirements Matrixhmp9071% (7)
- Level 3 Student Book Unit 1Document12 pagesLevel 3 Student Book Unit 1Bassem MohamedNo ratings yet
- 10.2: Kinematics of Rotational Motion: Learning ObjectivesDocument6 pages10.2: Kinematics of Rotational Motion: Learning ObjectivesRein manzanoNo ratings yet
- Chap10 ENGINEERING APPLICATION (L - Week 14)Document12 pagesChap10 ENGINEERING APPLICATION (L - Week 14)ADELLINNE NATASYA BINTI ROSDI / UPMNo ratings yet
- 2ndLE Lecture 23 - R9 Rotational KinematicsDocument28 pages2ndLE Lecture 23 - R9 Rotational KinematicsMark ReyesNo ratings yet
- GP1 - Q2 - W1 - SLK - Rotational MotionDocument28 pagesGP1 - Q2 - W1 - SLK - Rotational MotionGrayka QuiapoNo ratings yet
- Physics 100A Homework 10 - Chapter 10 (Part 2)Document4 pagesPhysics 100A Homework 10 - Chapter 10 (Part 2)Wendell CapiliNo ratings yet
- Physics Chapter 10 AnswersDocument40 pagesPhysics Chapter 10 AnswersAbovethesystem100% (14)
- Problem DescriptionDocument5 pagesProblem DescriptionAngel Lisette LaoNo ratings yet
- VISCOUS FLOW SIMULATION ARROUND NACA 641-212 - Fillipe OliveiraDocument20 pagesVISCOUS FLOW SIMULATION ARROUND NACA 641-212 - Fillipe OliveiraFillipe OliveiraNo ratings yet
- Chapter 2Document4 pagesChapter 2ourdreamsandfuture2004No ratings yet
- Fundamentals of Fluid FlowDocument38 pagesFundamentals of Fluid FlowharimecNo ratings yet
- PresentationDocument13 pagesPresentationselva_raj215414No ratings yet
- Physics For Engineers: Danielle Joy L. AlcantaraDocument30 pagesPhysics For Engineers: Danielle Joy L. AlcantaraKarren ManaloNo ratings yet
- Mod 3Document18 pagesMod 3King AhmedNo ratings yet
- Module 5Document4 pagesModule 5Joshua JunioNo ratings yet
- P6 For Engrs - RotationDocument6 pagesP6 For Engrs - RotationGrachelle Ann PabloNo ratings yet
- 3d8c0c3170a2a977c64a704e2c7ded64_7ce948727be8ce4a62f8574ac4eef6bdDocument14 pages3d8c0c3170a2a977c64a704e2c7ded64_7ce948727be8ce4a62f8574ac4eef6bdAryanSinghNo ratings yet
- 9 Physics 2 Rotational MotionDocument29 pages9 Physics 2 Rotational MotionDipanshu ShekharNo ratings yet
- Wendy Johanna Moreno Diaz - Post TaskDocument13 pagesWendy Johanna Moreno Diaz - Post Taskwendy jhoanna moreno diazNo ratings yet
- Computation of Total Resistance of Ships PDFDocument20 pagesComputation of Total Resistance of Ships PDFshahjadaNo ratings yet
- Practise Problems Set03Document5 pagesPractise Problems Set03rohit kumarNo ratings yet
- Week 01Document34 pagesWeek 01UĞURCAN KÖMÜRNo ratings yet
- Dynamics-Ch.1 Kinematics of A Particle-Spring 2017Document24 pagesDynamics-Ch.1 Kinematics of A Particle-Spring 2017Mohammed SobhiNo ratings yet
- MODULE 2. Kinematics of ParticlesDocument24 pagesMODULE 2. Kinematics of ParticlesAron H OcampoNo ratings yet
- 1a. Newtons - Laws - of - Motion - IIDocument5 pages1a. Newtons - Laws - of - Motion - IIKingNo ratings yet
- Natural Convection in A Differentially Heated Porous CavityDocument11 pagesNatural Convection in A Differentially Heated Porous CavitySaumyajit MajumderNo ratings yet
- Y20 PHY102 EndsemDocument28 pagesY20 PHY102 EndsemSAURAV kumarNo ratings yet
- Angular & Linear AccelerationsDocument8 pagesAngular & Linear AccelerationsMoustafa RadwanNo ratings yet
- 2ndLE Lecture 23 and Recit Review - R9 Rotational KinematicsDocument22 pages2ndLE Lecture 23 and Recit Review - R9 Rotational KinematicsLeanna DaneNo ratings yet
- GeneralPhysics1 G12 Q2 Mod1 Rotational Kinematics AndRotational Dynamics Week1Document21 pagesGeneralPhysics1 G12 Q2 Mod1 Rotational Kinematics AndRotational Dynamics Week1Cristina SacayananNo ratings yet
- MODULE 2 - Kinematics of Particles Rectilinear MotionDocument27 pagesMODULE 2 - Kinematics of Particles Rectilinear MotionArin ParkNo ratings yet
- CVE 154 - Statics of Rigid Bodies: Lesson 4: Roots of Equations - Bracketing MethodsDocument36 pagesCVE 154 - Statics of Rigid Bodies: Lesson 4: Roots of Equations - Bracketing MethodsIce BoxNo ratings yet
- HSSRPTR - Plus One Phy Questions Bank 2023 HssreporterDocument98 pagesHSSRPTR - Plus One Phy Questions Bank 2023 HssreporterShimi BasheerNo ratings yet
- PHYS 1120 1D Kinematics SolutionsDocument10 pagesPHYS 1120 1D Kinematics SolutionsEnger AlingasaNo ratings yet
- PHYS 1120 1D Kinematics SolutionsDocument10 pagesPHYS 1120 1D Kinematics SolutionsWilmar PutraNo ratings yet
- Circular MotionDocument8 pagesCircular Motionganeshpranav963No ratings yet
- Hydrulic River RoutingDocument36 pagesHydrulic River RoutingRas MekonnenNo ratings yet
- Advanced Problem Set On Introduction To PhysicsDocument5 pagesAdvanced Problem Set On Introduction To PhysicssonuNo ratings yet
- Sr. No. Practical 1: Static and Dynamic Balancing of Rotating MassesDocument21 pagesSr. No. Practical 1: Static and Dynamic Balancing of Rotating MassesFa CaNo ratings yet
- IMPACTDocument10 pagesIMPACTMoses MushehenuNo ratings yet
- Mechanicsssssss ExamplesDocument9 pagesMechanicsssssss ExamplesJhonrey Joey DesabilleNo ratings yet
- Flow Over CylinderDocument8 pagesFlow Over Cylinderdteja5807No ratings yet
- Lecture 2 - Kinematics of Mechanisms 2Document13 pagesLecture 2 - Kinematics of Mechanisms 2John KimaniNo ratings yet
- Rigid BodyDocument9 pagesRigid BodyChernet TugeNo ratings yet
- A New Formulation of Quantum Mechanics: A. I. Arbab, Faisal A. YasseinDocument7 pagesA New Formulation of Quantum Mechanics: A. I. Arbab, Faisal A. YasseinprabhamathsNo ratings yet
- Machine Problem Contents PDF FreeDocument23 pagesMachine Problem Contents PDF FreePedro Ian QuintanillaNo ratings yet
- B222 CHAPTER2-KinematicsofParticlesDocument13 pagesB222 CHAPTER2-KinematicsofParticlesJohn Carlo CortezNo ratings yet
- Air Bearing CalculationDocument47 pagesAir Bearing CalculationtomekzawistowskiNo ratings yet
- Kinematics of Machinery CbcgsDocument23 pagesKinematics of Machinery Cbcgshadesg895No ratings yet
- MecanicaClassica PG Aula6 MBGDDocument22 pagesMecanicaClassica PG Aula6 MBGDLeonardo Camargo RossatoNo ratings yet
- SolSec1pt2and1pt3 PDFDocument26 pagesSolSec1pt2and1pt3 PDFchoiNo ratings yet
- Wendy Johanna Moreno Diaz - Task 3Document17 pagesWendy Johanna Moreno Diaz - Task 3wendy jhoanna moreno diazNo ratings yet
- Lecture 7Document6 pagesLecture 7College Application CenterNo ratings yet
- Adaa Ini Diaaaa WKWKWKWKWKDocument19 pagesAdaa Ini Diaaaa WKWKWKWKWKMarshall ChristianNo ratings yet
- Aircraft Modes of VibrationDocument7 pagesAircraft Modes of VibrationmgskumarNo ratings yet
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Applications of Derivatives Rate of Change (Calculus) Mathematics Question BankFrom EverandApplications of Derivatives Rate of Change (Calculus) Mathematics Question BankNo ratings yet
- Trade Marketing and Its EffectsDocument32 pagesTrade Marketing and Its EffectsTrân Trần Ngọc BảoNo ratings yet
- Garia - Wikipedia, The Free EncyclopediaDocument9 pagesGaria - Wikipedia, The Free EncyclopediaPradip DattaNo ratings yet
- Disposable HME Filter (Child) - VADI MEDICAL-800-51300Document2 pagesDisposable HME Filter (Child) - VADI MEDICAL-800-51300Spectrum IngenierosNo ratings yet
- 1 - M30 S5P1 - Applied Linguistics - Lesson 1 - Pr. ZaidDocument5 pages1 - M30 S5P1 - Applied Linguistics - Lesson 1 - Pr. ZaidAnas MouakkilNo ratings yet
- MWL 1.0 (Tournament Rules 3.0.2)Document8 pagesMWL 1.0 (Tournament Rules 3.0.2)peterNo ratings yet
- Lesson Plan ABMDocument3 pagesLesson Plan ABMSatish Varma0% (1)
- FactorsAffectingPR1GroupII ABM 2Document46 pagesFactorsAffectingPR1GroupII ABM 2Jiyuvelle HeathcoteNo ratings yet
- Trimble 2 Rin ExDocument1 pageTrimble 2 Rin ExIvan.sidabutarNo ratings yet
- sr1 Cup Infopack 2016Document8 pagessr1 Cup Infopack 2016Stef PoienaruNo ratings yet
- 12c - High Availability Best Practices For Database ConsolidationDocument39 pages12c - High Availability Best Practices For Database ConsolidationPieroFerrazNo ratings yet
- The Significance of The 260 230 Ratio in Determining Nucleic Acid PurityDocument2 pagesThe Significance of The 260 230 Ratio in Determining Nucleic Acid Purityraubn1110% (1)
- Finpro FeatureDocument2 pagesFinpro FeaturesinglerakeshNo ratings yet
- RDSO SPN 187-2004 With Amd. 1 Solar Charge Control UnitDocument18 pagesRDSO SPN 187-2004 With Amd. 1 Solar Charge Control Unitsinghal_nn100% (2)
- Erie Scientific LLC: Globally Harmonized Safety Data Sheet (GHSDS)Document7 pagesErie Scientific LLC: Globally Harmonized Safety Data Sheet (GHSDS)Leni MeifitaNo ratings yet
- Control Theory Concepts For Modeling Uncertainty in Enzyme Kinetics of Biochemical NetworksDocument11 pagesControl Theory Concepts For Modeling Uncertainty in Enzyme Kinetics of Biochemical NetworksLjubisa MiskovicNo ratings yet
- Jam's Plumbing Tools ReviewerDocument149 pagesJam's Plumbing Tools ReviewerJamaron TatingNo ratings yet
- 1Ø Service Manual: Engineered For LifeDocument76 pages1Ø Service Manual: Engineered For LifejewettwaterNo ratings yet
- Manual - Leapton Mono 665 - LP210-M-66-MHDocument13 pagesManual - Leapton Mono 665 - LP210-M-66-MHnogumoNo ratings yet
- Ref Plus Condensing Unit BrochureDocument16 pagesRef Plus Condensing Unit BrochureRahul DubeyNo ratings yet
- Unit 9. Preserving The Environment: A. Dis'posalDocument15 pagesUnit 9. Preserving The Environment: A. Dis'posalDxng 1No ratings yet
- IB Assignment Tue 12-3Document2 pagesIB Assignment Tue 12-3MIR HASSANNo ratings yet
- Account Opening FormDocument11 pagesAccount Opening FormTotimeh WisdomNo ratings yet
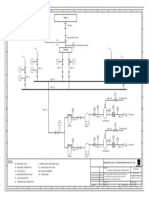
- Schematic For Tank Wagon Decanting Project PDFDocument1 pageSchematic For Tank Wagon Decanting Project PDFlataNo ratings yet
- MECH 2001 Week 1 Le SummeryDocument14 pagesMECH 2001 Week 1 Le Summeryujjwal katyalNo ratings yet
- Application of Consumer BehaviorDocument6 pagesApplication of Consumer BehaviorNoella Marie BaronNo ratings yet
- McDonalds 08 JIBED Vol 3 No. 4 With Pavlou PDocument19 pagesMcDonalds 08 JIBED Vol 3 No. 4 With Pavlou PUnnati PandyaNo ratings yet
- Simulated Binar Crossover F Continuous Search Space: Comp SystemsDocument34 pagesSimulated Binar Crossover F Continuous Search Space: Comp SystemsSal Ie EmNo ratings yet