Download as pdf or txt
You might also like
- Patricia Faisca - A Concise Introduction To Thermodynamics For Physicists-CRC Press (2022)Document237 pagesPatricia Faisca - A Concise Introduction To Thermodynamics For Physicists-CRC Press (2022)Piotr Jankowski100% (1)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- E060701020025 PDFDocument6 pagesE060701020025 PDFمنير أحمدNo ratings yet
- Dynamic Buckling in A Next Generation Metal Coolant Nuclear ReactorDocument4 pagesDynamic Buckling in A Next Generation Metal Coolant Nuclear ReactorRizwan SamorNo ratings yet
- Comparación de Los Métodos de Diseño de Carcasas para Tanques Cilíndricos de Almacenamiento de Líquidos.Document15 pagesComparación de Los Métodos de Diseño de Carcasas para Tanques Cilíndricos de Almacenamiento de Líquidos.EleonorSaray FernandezSaavedraNo ratings yet
- Effect of Staging Height On Seismic Performance of Elevated Water TankDocument6 pagesEffect of Staging Height On Seismic Performance of Elevated Water TankUmesh RaygandhiNo ratings yet
- Seismic Analysis of Over Head INTZE Water Tank Subjected To Sloshing EffectDocument8 pagesSeismic Analysis of Over Head INTZE Water Tank Subjected To Sloshing EffectZeenat ShaikhNo ratings yet
- Comparative Analysis of Sloshing Impact On Rectangular Overhead Water Tank With Different Types of Bracings by Using STAAD - ProDocument12 pagesComparative Analysis of Sloshing Impact On Rectangular Overhead Water Tank With Different Types of Bracings by Using STAAD - ProEditor IJTSRDNo ratings yet
- Performance of An RCC Frame Building Subjected To Hydrodynamic Force at Each Floor Level-A Case StudyDocument9 pagesPerformance of An RCC Frame Building Subjected To Hydrodynamic Force at Each Floor Level-A Case StudymehrdadNo ratings yet
- 14.Eng-Analysis of Sloshing Impact - MuthuvijayDocument16 pages14.Eng-Analysis of Sloshing Impact - MuthuvijayImpact JournalsNo ratings yet
- Seismic Response of Overhead Water Tank With Different Staging SystemDocument12 pagesSeismic Response of Overhead Water Tank With Different Staging SystemPrashant BansodeNo ratings yet
- Seismic Analysis of Over Head INTZE Water Tank Subjected To Sloshing EffectDocument9 pagesSeismic Analysis of Over Head INTZE Water Tank Subjected To Sloshing EffectLuis Wilmer Nuñez EchaccayaNo ratings yet
- Seismic Response of Elevated Water Tanks An OverviewDocument5 pagesSeismic Response of Elevated Water Tanks An OverviewRaeghoNo ratings yet
- Structural Assessment of Circular Overhead Water Tank Based On Frame Staging Subjected To Seismic LoadingDocument7 pagesStructural Assessment of Circular Overhead Water Tank Based On Frame Staging Subjected To Seismic LoadingFrederick TanNo ratings yet
- Behavior of Concrete Liquid Containing Structures Subjected To Seismic LoadingDocument16 pagesBehavior of Concrete Liquid Containing Structures Subjected To Seismic LoadingEric WilkinsNo ratings yet
- ch2 Literature-1Document13 pagesch2 Literature-1azeempathan0No ratings yet
- A Study of Overhead Water Tanks Subjected To Dynamic Loads: Dona Rose K J, Sreekumar M, Anumod A SDocument5 pagesA Study of Overhead Water Tanks Subjected To Dynamic Loads: Dona Rose K J, Sreekumar M, Anumod A SMohammedEl-GhobaryNo ratings yet
- Study of Seismic Analysis of Water Tank at Ground LevelDocument6 pagesStudy of Seismic Analysis of Water Tank at Ground LevelAnonymous kw8Yrp0R5rNo ratings yet
- Supporting Systems For Reinforced Concrete Elevated Water Tanks: A State-Of-The-Art Literature ReviewDocument4 pagesSupporting Systems For Reinforced Concrete Elevated Water Tanks: A State-Of-The-Art Literature ReviewBright IndiaNo ratings yet
- 06aug201706084607 Abhijeet Babar 758-763Document6 pages06aug201706084607 Abhijeet Babar 758-763tesNo ratings yet
- Seismic Induced Forces On Rigid Water Storage TanksDocument6 pagesSeismic Induced Forces On Rigid Water Storage TanksChristian LeobreraNo ratings yet
- Seismic Behavior of RC Elevated Water Tankunder Different Types of Staging PatterDocument7 pagesSeismic Behavior of RC Elevated Water Tankunder Different Types of Staging PatterlangchenNo ratings yet
- Seismic Demand Evaluation of Elevated Reinforced CDocument18 pagesSeismic Demand Evaluation of Elevated Reinforced CLUIS WILMER NUÑEZ ECHACCAYANo ratings yet
- Simplified Seismic Analysis Procedures For Elevated TanksDocument19 pagesSimplified Seismic Analysis Procedures For Elevated TanksCesar Yoshio Sanchez HuchiyamaNo ratings yet
- Dynamic Analysis of Elevated RCC Circular Liquid Storage TankDocument3 pagesDynamic Analysis of Elevated RCC Circular Liquid Storage TankPitolwala ZuzarNo ratings yet
- Elevated Water TankDocument16 pagesElevated Water TankRANJITH PULIKESHINo ratings yet
- Seismic Analysis of Elevated Water Tank With Variations of H/D Ratio and Container Shape Using Staad-Pro V8iDocument6 pagesSeismic Analysis of Elevated Water Tank With Variations of H/D Ratio and Container Shape Using Staad-Pro V8iAditya SinghNo ratings yet
- 2014 - Sediment Mobility Effect On Seabed Resistance For Unburied PipelineDocument18 pages2014 - Sediment Mobility Effect On Seabed Resistance For Unburied Pipelinefaris nauvalNo ratings yet
- Non Linear Time History Analysis of An Elevated Water Tank: IjarstDocument8 pagesNon Linear Time History Analysis of An Elevated Water Tank: IjarstLuis Wilmer Nuñez EchaccayaNo ratings yet
- 86220100302Document19 pages86220100302AbdulazizMotteNo ratings yet
- Nonlinear Analysis of A Dam-Reservoir-Foundation System Under Spatially Variable Seismic ExcitationsDocument8 pagesNonlinear Analysis of A Dam-Reservoir-Foundation System Under Spatially Variable Seismic ExcitationsBagheri HessamNo ratings yet
- Simple Procedure For Seismic Analysis of Liquid-Storage TanksDocument5 pagesSimple Procedure For Seismic Analysis of Liquid-Storage TanksbcvdocuNo ratings yet
- 1998 - Koh - Fluid Structure Interaction Analysis of 3D Rectangular Tank by BE FEDocument16 pages1998 - Koh - Fluid Structure Interaction Analysis of 3D Rectangular Tank by BE FEpouyaNo ratings yet
- IJEDR1904020Document6 pagesIJEDR1904020Pranav DevaleNo ratings yet
- KramerYoung-snhPaper Revised RevFinalDocument15 pagesKramerYoung-snhPaper Revised RevFinalJUNIOR OLIVONo ratings yet
- Comparison Between Static and Dynamic Analysis of Elevated Water TankDocument10 pagesComparison Between Static and Dynamic Analysis of Elevated Water TankA RafiNo ratings yet
- WCE2010 pp1913-1916Document4 pagesWCE2010 pp1913-1916Katherine FoxNo ratings yet
- Finite Element Analysis of Steel Storage Tank Under Siesmic PDFDocument8 pagesFinite Element Analysis of Steel Storage Tank Under Siesmic PDFBala SutharshanNo ratings yet
- Design Analysis & Comparsion of Intze Type Water Tank For Different Wind Speed and Seismic Zones As Per Indian CodesDocument10 pagesDesign Analysis & Comparsion of Intze Type Water Tank For Different Wind Speed and Seismic Zones As Per Indian CodesAnonymous oVmxT9KzrbNo ratings yet
- Wavelet-Based Non-Stationary Seismic Rocking Response of Exibly Supported Tanks GooodDocument25 pagesWavelet-Based Non-Stationary Seismic Rocking Response of Exibly Supported Tanks Gooodmmoeini412002No ratings yet
- Response of Concrete Liquid Containing Structures in Different Seismic ZonesDocument13 pagesResponse of Concrete Liquid Containing Structures in Different Seismic Zonessilvio_ramos_3No ratings yet
- Seismic Analysis of Completely Buried Rectangular Concrete ReservoirDocument6 pagesSeismic Analysis of Completely Buried Rectangular Concrete ReservoirbcvdocuNo ratings yet
- IJCE v8n3p204 enDocument17 pagesIJCE v8n3p204 enDieo HernándezNo ratings yet
- Modified Proposed Provisions For Aseismic Design of Liquid Storage Tanks: Part II - Commentary and ExamplesDocument14 pagesModified Proposed Provisions For Aseismic Design of Liquid Storage Tanks: Part II - Commentary and Examplesafzal taiNo ratings yet
- January 2013: ArticleDocument7 pagesJanuary 2013: Articlezikzak2011No ratings yet
- Behaviour of Elevated Water Tank Considering Sloshing EffectDocument32 pagesBehaviour of Elevated Water Tank Considering Sloshing Effectazeempathan0No ratings yet
- Review On Seismic Analysis of Elevated Water Tank-2-LibreDocument7 pagesReview On Seismic Analysis of Elevated Water Tank-2-LibreTejaSriNo ratings yet
- Zeidan Dam Chapter 2014Document56 pagesZeidan Dam Chapter 2014BOUKHELIFANo ratings yet
- Spectra JBPtank RetrofitDocument16 pagesSpectra JBPtank RetrofitdonaNo ratings yet
- Top Roof Displacement of Elevated Water PDFDocument6 pagesTop Roof Displacement of Elevated Water PDFhtrvcbfcscdNo ratings yet
- Computational Fluid Dynamics Modelling of Pipe Soil Interaction in CurrentDocument5 pagesComputational Fluid Dynamics Modelling of Pipe Soil Interaction in CurrentGuomin JiNo ratings yet
- Seismic Performance of Elevated Reinforced Concrete Water TanksDocument10 pagesSeismic Performance of Elevated Reinforced Concrete Water TanksCHETAN JAIPRAKASH CHITTENo ratings yet
- 3D Analysis For Conical Tanks Under Seismic Loads: Ahmed A.Rashed, Gamal H. Mahmoud, Nasr E. Nasr, Amgad A. TalaatDocument16 pages3D Analysis For Conical Tanks Under Seismic Loads: Ahmed A.Rashed, Gamal H. Mahmoud, Nasr E. Nasr, Amgad A. TalaatChime MornNo ratings yet
- Estimation of Hydrostatic Force Are View For Realistic ApproachDocument6 pagesEstimation of Hydrostatic Force Are View For Realistic ApproachkiranNo ratings yet
- Fošumpaur 2019 IOP Conf. Ser. Mater. Sci. Eng. 596 012031Document9 pagesFošumpaur 2019 IOP Conf. Ser. Mater. Sci. Eng. 596 012031durgam kkNo ratings yet
- Microsoft Word Shariatmadar 8icce EnglishDocument9 pagesMicrosoft Word Shariatmadar 8icce EnglishsanjusamsonNo ratings yet
- Vol. 11-No.1, Jan-Jun, Web VersionDocument64 pagesVol. 11-No.1, Jan-Jun, Web VersionAnil Kr MeenaNo ratings yet
- Gong 2006Document21 pagesGong 2006Sachin S AwasareNo ratings yet
- Tanques ReforzadosDocument11 pagesTanques ReforzadosJulio Humberto Díaz RondánNo ratings yet
- DELTA-DeLTA Connection of A Three Phase TransformerDocument14 pagesDELTA-DeLTA Connection of A Three Phase TransformerDevee AmbasNo ratings yet
- Basic Mechanical Engineering MCQs PartDocument11 pagesBasic Mechanical Engineering MCQs PartTrbman exaNo ratings yet
- Emi Book 2Document97 pagesEmi Book 2Arya SharmaNo ratings yet
- Everwell CA Condensing Unit Technical SpecsDocument2 pagesEverwell CA Condensing Unit Technical SpecsgunindustrialmgaNo ratings yet
- CM1Document16 pagesCM1WASHIPONG LONGKUMER 2147327No ratings yet
- 18 Solid State Formula Sheets Getmarks AppDocument7 pages18 Solid State Formula Sheets Getmarks AppHari KrishnaNo ratings yet
- Advanced Thermal and Fluid EngineeringDocument16 pagesAdvanced Thermal and Fluid EngineeringNidhin KakkanattuNo ratings yet
- 50ucupv PSD enDocument58 pages50ucupv PSD enMohd AzharNo ratings yet
- Hovap Hygienic Centrifugal PumpsDocument7 pagesHovap Hygienic Centrifugal PumpsSergio Veliz RNo ratings yet
- Exercise 6 Chaks Pure MathematicsDocument2 pagesExercise 6 Chaks Pure MathematicsDenzel WhataNo ratings yet
- Design, Modeling and Simulation of An Electric Vehicle SystemDocument12 pagesDesign, Modeling and Simulation of An Electric Vehicle SystemsushruthanNo ratings yet
- System Sensor Product BrochureDocument24 pagesSystem Sensor Product BrochureJAY ROD AWITNo ratings yet
- Abb 1hc0075855-Revab en Surge Arrester Polim-KDocument5 pagesAbb 1hc0075855-Revab en Surge Arrester Polim-KDavid Omar Torres GutierrezNo ratings yet
- High Precision Spectroradiometer Integrating Sphere System 9000bDocument12 pagesHigh Precision Spectroradiometer Integrating Sphere System 9000blisun008No ratings yet
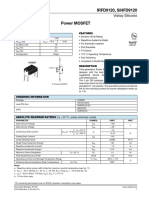
- Irfd9120, Sihfd9120: Vishay SiliconixDocument9 pagesIrfd9120, Sihfd9120: Vishay SiliconixNilton sergio gomes linsNo ratings yet
- DPP - 04 - Coordinate System & VectorDocument3 pagesDPP - 04 - Coordinate System & VectorSonali singhNo ratings yet
- All Printed Organic Humidity Sensor Based On - 2020 - Sensing and Bio Sensing RDocument12 pagesAll Printed Organic Humidity Sensor Based On - 2020 - Sensing and Bio Sensing RIon CorbuNo ratings yet
- 2014 Mathematics WAEC Objective Past QuestionsDocument16 pages2014 Mathematics WAEC Objective Past QuestionsVer Terese RichardNo ratings yet
- WPS - 012Document11 pagesWPS - 012MAT-LIONNo ratings yet
- Barad - Agential Cut - 3 - Rouse - Agential Cuts - The Conceptual and Ethical Normativity of Intra-Active PhenomenaDocument12 pagesBarad - Agential Cut - 3 - Rouse - Agential Cuts - The Conceptual and Ethical Normativity of Intra-Active PhenomenaRogerio Duarte Do Pateo Guarani KaiowáNo ratings yet
- NITK Surathkal About The FDP RegistrationDocument1 pageNITK Surathkal About The FDP RegistrationKumar ReddyNo ratings yet
- Electronic ComponentsDocument23 pagesElectronic ComponentsRussel Erese Garcia100% (1)
- Optimal Sizing of Battery Energy Storage Systems For Dynami Frequency Control in An Islanded MicrogridDocument25 pagesOptimal Sizing of Battery Energy Storage Systems For Dynami Frequency Control in An Islanded MicrogridcomparisonchromaNo ratings yet
- Aluminium Conductor Sag Tension CalculatorDocument10 pagesAluminium Conductor Sag Tension Calculator1382aceNo ratings yet
- Mechanical Properties of Fluids: Brief OverviewDocument3 pagesMechanical Properties of Fluids: Brief OverviewAjay PanditNo ratings yet
- Triangle Trigonometry and Circles TeacherDocument7 pagesTriangle Trigonometry and Circles TeacherClauciane Dias de LimaNo ratings yet
- RAY OPTICS MCQsDocument5 pagesRAY OPTICS MCQsaryaadarshsinghNo ratings yet
- 9th Physics Full Book McqsDocument30 pages9th Physics Full Book Mcqssky.blueNo ratings yet
- Ee2251 Electrical Machines PDFDocument120 pagesEe2251 Electrical Machines PDFJohn RivasNo ratings yet