Download as pdf or txt
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Easy Servo Driver JK-HSD86Document7 pagesEasy Servo Driver JK-HSD86Renato KristićNo ratings yet
- Arcam Alpha10 10p Power Amplifier Service ManualDocument19 pagesArcam Alpha10 10p Power Amplifier Service Manual王宗超No ratings yet
- KT 5198aDocument5 pagesKT 5198asrinu149No ratings yet
- Motoman MRC TroubleshootingDocument153 pagesMotoman MRC Troubleshootingnestor gonzalez de leon100% (1)
- L297Document12 pagesL297wtn2013No ratings yet
- CD 00000063Document11 pagesCD 00000063api-306853111No ratings yet
- LS7290 Stepper Motor ControlDocument12 pagesLS7290 Stepper Motor ControlOlger NavarroNo ratings yet
- LM 297Document12 pagesLM 297Monika JhaNo ratings yet
- Stepper Motor Controllers: DescriptionDocument11 pagesStepper Motor Controllers: DescriptionIgor Rocha PauloNo ratings yet
- Stepper Motor Controllers: DescriptionDocument12 pagesStepper Motor Controllers: DescriptionGigi TyireanNo ratings yet
- Current Controller For Stepping Motors: DescriptionDocument8 pagesCurrent Controller For Stepping Motors: Descriptiontryu40No ratings yet
- Devicecraft: H-Bridge DC Motor Driver / Speed ControllerDocument26 pagesDevicecraft: H-Bridge DC Motor Driver / Speed ControllerGS OLDNo ratings yet
- LPD6803Document13 pagesLPD6803Deyabu DesignNo ratings yet
- Experiment No 8Document7 pagesExperiment No 8Manikandan P Engineering EEENo ratings yet
- ISL6227CAZDocument26 pagesISL6227CAZEdson HenriqueNo ratings yet
- EG1000Document12 pagesEG1000alizanelectronicNo ratings yet
- Max3070e Max3079eDocument23 pagesMax3070e Max3079eCarlos IbaNo ratings yet
- LS 231g2 Advanced Multifunctional Servo DriveDocument56 pagesLS 231g2 Advanced Multifunctional Servo DriveElvis StansvikNo ratings yet
- EUP3475A Chip in JVC KW-M24BTDocument11 pagesEUP3475A Chip in JVC KW-M24BTdjts669pw2No ratings yet
- 24-Bit Analog-to-Digital Converter (ADC) With Built-In Temperature SensorDocument8 pages24-Bit Analog-to-Digital Converter (ADC) With Built-In Temperature SensorFabricio AmaguañaNo ratings yet
- DM74LS191Document6 pagesDM74LS191Ritabrata RoyNo ratings yet
- MC3479 Stepper Motor Driver: FeaturesDocument10 pagesMC3479 Stepper Motor Driver: FeaturesHenry CastandNo ratings yet
- TECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor ConnectionDocument9 pagesTECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor Connectionتكنو ليفتNo ratings yet
- Lect 4 PDFDocument14 pagesLect 4 PDFSaif AlabdullahNo ratings yet
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- LM5030Document11 pagesLM5030servitec informaticaNo ratings yet
- ON Semicon ON NCP6131S52MNR2G - C99681Document40 pagesON Semicon ON NCP6131S52MNR2G - C99681joe wiillsonNo ratings yet
- LM5025B Active Clamp Voltage Mode PWM Controller: Literature Number: SNVS354ADocument18 pagesLM5025B Active Clamp Voltage Mode PWM Controller: Literature Number: SNVS354AbpchimeraNo ratings yet
- NJM3771D2Document9 pagesNJM3771D2mahdi elmayNo ratings yet
- Rhino Motion Controls: RMCS-1102 Micro-Stepping Motor Driver (Max. 50Vdc and 5A Per Phase)Document11 pagesRhino Motion Controls: RMCS-1102 Micro-Stepping Motor Driver (Max. 50Vdc and 5A Per Phase)Adarsh Singh PariharNo ratings yet
- Ald1502 Datasheet 1Document4 pagesAld1502 Datasheet 1Dylan FlorezNo ratings yet
- Ci Driver Do Motor Do CD Rom DatasheetDocument11 pagesCi Driver Do Motor Do CD Rom DatasheetAdriano TameouvindoNo ratings yet
- ENG SS LDM-1000 Operation Manual ADocument11 pagesENG SS LDM-1000 Operation Manual AGunandar GunandarNo ratings yet
- Load Sequencing LSC2Document11 pagesLoad Sequencing LSC2IDA HAMIDAHNo ratings yet
- Description Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeDocument8 pagesDescription Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeLuisNo ratings yet
- LS7262C - L010547 - Lsi-Ls7260, Lsi-Ls7262Document7 pagesLS7262C - L010547 - Lsi-Ls7260, Lsi-Ls7262Funda HandaNo ratings yet
- Features Description: LTC3707 High Effi Ciency, 2-Phase Synchronous Step-Down Switching RegulatorDocument32 pagesFeatures Description: LTC3707 High Effi Ciency, 2-Phase Synchronous Step-Down Switching RegulatoruimNo ratings yet
- Ace 701331anDocument13 pagesAce 701331ansivakrishna8055No ratings yet
- XC9504 Led DriverDocument53 pagesXC9504 Led DriverbrdgtpereraNo ratings yet
- Working Sinewave InverterDocument10 pagesWorking Sinewave InverterxenotargetNo ratings yet
- PWM ControllerDocument20 pagesPWM ControllerAmrit203No ratings yet
- Al8860 1019719Document18 pagesAl8860 1019719hansNo ratings yet
- PWM Control 1A Step-Down Converter Data Sheet: TM Technology IncDocument12 pagesPWM Control 1A Step-Down Converter Data Sheet: TM Technology IncselocaNo ratings yet
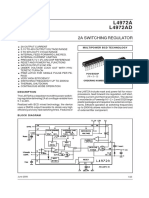
- L4972ADocument23 pagesL4972ARICHIHOTS2No ratings yet
- A 2918 SW Data SheetDocument8 pagesA 2918 SW Data SheetGustavo LunaNo ratings yet
- SJ100 QRG NB5821XDDocument24 pagesSJ100 QRG NB5821XDFiq GanuNo ratings yet
- SAMOTRONIC101 (4 636 6608 0) : 1. OverviewDocument5 pagesSAMOTRONIC101 (4 636 6608 0) : 1. Overviewjonathan.boussoir2215No ratings yet
- Ta 8429 HDocument14 pagesTa 8429 HrikyNo ratings yet
- Dynalco SST-2000A.data SheetDocument2 pagesDynalco SST-2000A.data Sheetalimoya13No ratings yet
- TACHOMETERDocument9 pagesTACHOMETERAltayyeb AlfaryjatNo ratings yet
- Manual Es Dh1208Document13 pagesManual Es Dh1208AgnaldoNo ratings yet
- Silergy-Corp-SY8088AAC C79313Document9 pagesSilergy-Corp-SY8088AAC C79313VuvnNo ratings yet
- Step-Down Converter: 3A, 30V, 340Khz SynchronousDocument11 pagesStep-Down Converter: 3A, 30V, 340Khz SynchronouschaghoufNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- IoT LibroDocument297 pagesIoT Libroel warrior666 xdNo ratings yet
- Assured: 1Kw Fast-Tune HF Antenna CouplerDocument2 pagesAssured: 1Kw Fast-Tune HF Antenna Couplerfalcom2No ratings yet
- LT3751 - Cap Charger ControllerDocument34 pagesLT3751 - Cap Charger Controllerdinamik2tNo ratings yet
- JBL Cinema Sb150: Home Cinema 2.1 Soundbar With Wireless SubwooferDocument9 pagesJBL Cinema Sb150: Home Cinema 2.1 Soundbar With Wireless SubwooferMisaelJordiJermiaNo ratings yet
- Am 4825 PeDocument3 pagesAm 4825 PeMafia BetawiNo ratings yet
- TES-33 Battery Capacity Tester (RS-232)Document2 pagesTES-33 Battery Capacity Tester (RS-232)samir kasemNo ratings yet
- Pa-3640vb h2 Mt1eDocument8 pagesPa-3640vb h2 Mt1eHarlan 123No ratings yet
- VLSI Design Mid 2Document3 pagesVLSI Design Mid 2mohanNo ratings yet
- IC 741 Op-Amp Tutorial and CharacteristicsDocument5 pagesIC 741 Op-Amp Tutorial and CharacteristicsBenNo ratings yet
- Tarang Lion BT Exclusive: Features Driver UnitDocument1 pageTarang Lion BT Exclusive: Features Driver UnitAnil NagallaNo ratings yet
- Product Specifications Product Specifications: R2V2PX310R R2V2PX310RDocument3 pagesProduct Specifications Product Specifications: R2V2PX310R R2V2PX310RJuan Francisco Cajusol SantistebanNo ratings yet
- Srmist Department of It 15It314J-Principles of Operating Systems Cycle Test-1 Answer Key Part - BDocument8 pagesSrmist Department of It 15It314J-Principles of Operating Systems Cycle Test-1 Answer Key Part - BPandiaraj RajNo ratings yet
- Sensor de Flujo HoneywellDocument4 pagesSensor de Flujo HoneywellMartin ArevaloNo ratings yet
- 14 Item 206 BB Base BoardDocument4 pages14 Item 206 BB Base BoardAlexDorNo ratings yet
- LM387ANDocument4 pagesLM387ANEl HackerNo ratings yet
- Assignment: 1: School of Electronics Engineering ECE4009-Wireless and Mobile CommunicationsDocument2 pagesAssignment: 1: School of Electronics Engineering ECE4009-Wireless and Mobile CommunicationsAYUSH GURTU 17BEC0185No ratings yet
- Electromagnetic Effects 1 QPDocument10 pagesElectromagnetic Effects 1 QPnssNo ratings yet
- Basic Laws of Electric Circuits: Nodal AnalysisDocument29 pagesBasic Laws of Electric Circuits: Nodal AnalysisLeila CheropNo ratings yet
- Partial Discharge Measurements Under DC Test Voltage: Application NoteDocument19 pagesPartial Discharge Measurements Under DC Test Voltage: Application NoteInsan AzizNo ratings yet
- SchematicsDocument34 pagesSchematicslj41No ratings yet
- A Calibration Method For Small Circular LoopDocument5 pagesA Calibration Method For Small Circular LoopaartrajNo ratings yet
- Tape and Saturators FX ManualDocument12 pagesTape and Saturators FX ManualSebastian RehbeinNo ratings yet
- OE-A Brochure2013 WebDocument117 pagesOE-A Brochure2013 WebMladen RoskoNo ratings yet
- BTEC Unit 50 - Assignment 1 (P1, P2, P3)Document6 pagesBTEC Unit 50 - Assignment 1 (P1, P2, P3)99SUPERDOG99No ratings yet
- Fiber Optic SwitchesDocument31 pagesFiber Optic SwitchespatriciaNo ratings yet
- Dell G7 7790Document24 pagesDell G7 7790Ahmed Ali AlaqabeNo ratings yet
- SH 4007 AhDocument398 pagesSH 4007 AhsmsbondNo ratings yet
- Vlsi TestabilityDocument50 pagesVlsi TestabilityjeevithpaulNo ratings yet
- Chapter 19 Operational AmplifiersDocument7 pagesChapter 19 Operational AmplifierssuganyaNo ratings yet