Download as docx, pdf, or txt
You might also like
- Richard Dyer - Stars-British Film Institute (1998)Document111 pagesRichard Dyer - Stars-British Film Institute (1998)Maria ParuzelNo ratings yet
- Epanet and Development. How To Calculate Water Networks by ComputerDocument160 pagesEpanet and Development. How To Calculate Water Networks by ComputerArnalich - water and habitat98% (91)
- Humanoid RobotsDocument13 pagesHumanoid RobotsAyush PatelNo ratings yet
- A Description of Homeopathic MiasmsDocument24 pagesA Description of Homeopathic Miasmstobrienmsc100% (6)
- Engineering Amorphous Computing SystemsDocument20 pagesEngineering Amorphous Computing Systemssimran ranaNo ratings yet
- An Approach of Ir-Based Short-Range Correspondence Systems For Swarm Robot Balanced Requisitions and CommunicationsDocument10 pagesAn Approach of Ir-Based Short-Range Correspondence Systems For Swarm Robot Balanced Requisitions and CommunicationsAdam HansenNo ratings yet
- Cognitive Robotics GroupDocument6 pagesCognitive Robotics GroupNessa May Desiree SuganobNo ratings yet
- Virtual Telepresence and Gesture Controlled RobotDocument7 pagesVirtual Telepresence and Gesture Controlled RobotsridharparthipanNo ratings yet
- pp25 Mountain1Document2 pagespp25 Mountain1Ciprian IlieNo ratings yet
- Human Robot Interaction Research PaperDocument7 pagesHuman Robot Interaction Research Paperwlyxiqrhf100% (1)
- Big Data Analytics As A Service For Affective Humanoid Service RobotsDocument8 pagesBig Data Analytics As A Service For Affective Humanoid Service RobotsKrushnaNo ratings yet
- Novel Mobile Robot Path Planning Algorithm: Hachour OuardaDocument10 pagesNovel Mobile Robot Path Planning Algorithm: Hachour Ouarday.yusofNo ratings yet
- A Conceptual Generalized Nets Immunological Model For Agent Based Exploration of Unknown EnvironmentDocument12 pagesA Conceptual Generalized Nets Immunological Model For Agent Based Exploration of Unknown EnvironmentzlatogorNo ratings yet
- Micro-Blog: Sharing and Querying Content Through Mobile Phones and Social ParticipationDocument13 pagesMicro-Blog: Sharing and Querying Content Through Mobile Phones and Social ParticipationDivya AggarwalNo ratings yet
- Human Robot Interaction PDFDocument10 pagesHuman Robot Interaction PDFEKAMBARAM pushpalatha100% (1)
- Robotics AssignmentDocument3 pagesRobotics AssignmentSameer Pidadi100% (1)
- Literature Review Mobile RobotDocument8 pagesLiterature Review Mobile Robotafmzzaadfjygyf100% (1)
- Thrun pearlAAAI02Document7 pagesThrun pearlAAAI02recoNo ratings yet
- Current Trends in Reality Mining: Jyoti More, Chelpa LingamDocument5 pagesCurrent Trends in Reality Mining: Jyoti More, Chelpa Lingamwww.irjes.comNo ratings yet
- A Study To Find Facts Behind Preprocessing On Deep Learning AlgorithmsDocument11 pagesA Study To Find Facts Behind Preprocessing On Deep Learning AlgorithmsEsclet PHNo ratings yet
- Articulo CientificoDocument18 pagesArticulo CientificoDiego Fernando CaicedoNo ratings yet
- Automated Human Following TrolleyDocument6 pagesAutomated Human Following TrolleyBala SubramaniamNo ratings yet
- Haptic Interaction Between Human and Virtual Icub Robot Using Novint Falcon With CHAI3D and MATLABDocument6 pagesHaptic Interaction Between Human and Virtual Icub Robot Using Novint Falcon With CHAI3D and MATLABmumun139No ratings yet
- CONCEPT PAPER No. 3 RussellDocument4 pagesCONCEPT PAPER No. 3 RusselljarchncsNo ratings yet
- Vijay Kumar, George Bekey, Arthur SandersonDocument8 pagesVijay Kumar, George Bekey, Arthur SandersonSuryaDev ReddyNo ratings yet
- How The Uses of Robots Have Changed Over The YearsDocument2 pagesHow The Uses of Robots Have Changed Over The YearsClarence EstevesNo ratings yet
- Robot Operating System Based Autonomous Navigation Platform With Human Robot InteractionDocument9 pagesRobot Operating System Based Autonomous Navigation Platform With Human Robot InteractionTELKOMNIKA100% (1)
- An Autonomous Obstacle Avoidance Robot Using Ultrasonic SensorDocument14 pagesAn Autonomous Obstacle Avoidance Robot Using Ultrasonic SensorXaf FarNo ratings yet
- Mixed Reality Enhanced User Interactive Path Planning For Omnidirectional Mobile RobotDocument16 pagesMixed Reality Enhanced User Interactive Path Planning For Omnidirectional Mobile RobotLeon MutambalaNo ratings yet
- Interacting With Computers: Ramón Hervás, José BravoDocument17 pagesInteracting With Computers: Ramón Hervás, José BravoAkif KhanNo ratings yet
- Face-to-Face Proximity Estimation Using Bluetooth On SmartphonesDocument13 pagesFace-to-Face Proximity Estimation Using Bluetooth On SmartphonesJoshua MarquezNo ratings yet
- Internet PredictionDocument31 pagesInternet PredictionAhmedSchiavioNo ratings yet
- Analysis For Swarm Robot Coordination Using Fuzzy LogicDocument5 pagesAnalysis For Swarm Robot Coordination Using Fuzzy LogicAndry Meylani0% (1)
- Monash University Indonesia Inspire Doctoral Scholarship ProgramDocument6 pagesMonash University Indonesia Inspire Doctoral Scholarship ProgramdaniaamaniNo ratings yet
- 1 s2.0 S2211285522010916 MainDocument12 pages1 s2.0 S2211285522010916 MainjavierNo ratings yet
- Handling Communication Failure in Multi Robot Area ExplorationDocument16 pagesHandling Communication Failure in Multi Robot Area ExplorationSonali PatelNo ratings yet
- Fallon Et Al. (2022) - Legged Robotics: Agile and Dynamic Interaction.Document24 pagesFallon Et Al. (2022) - Legged Robotics: Agile and Dynamic Interaction.brenderdanNo ratings yet
- Coelho 2021Document22 pagesCoelho 2021mathulegionNo ratings yet
- Effective Path Planning of A Multi Robot System Using A Hovering EyeDocument2 pagesEffective Path Planning of A Multi Robot System Using A Hovering EyeerpublicationNo ratings yet
- Localization and Navigation For Aoutonomous Mobile RobotDocument12 pagesLocalization and Navigation For Aoutonomous Mobile RobotEkky Yonathan GunawanNo ratings yet
- Pocomo: Projected Collaboration Using Mobile Devices: CitationDocument5 pagesPocomo: Projected Collaboration Using Mobile Devices: CitationjyothiNo ratings yet
- Swarm Robotics Is A New Approach To The Coordination of Multi Robot Systems Which Consist of Large Numbers of Mostly Simple Physical RobotsDocument1 pageSwarm Robotics Is A New Approach To The Coordination of Multi Robot Systems Which Consist of Large Numbers of Mostly Simple Physical Robotspramodh1991No ratings yet
- (2023) VoxPoserDocument23 pages(2023) VoxPoserpolygalaceae0730No ratings yet
- Robotics Thesis TopicsDocument6 pagesRobotics Thesis Topicsafloaaffbkmmbx100% (2)
- Is Robotics Going Statistics? The Field of Probabilistic RoboticsDocument8 pagesIs Robotics Going Statistics? The Field of Probabilistic Roboticsrobo_c_programmer4515No ratings yet
- Personal Edu RoboticsDocument4 pagesPersonal Edu RoboticsIvan AvramovNo ratings yet
- Cooperative Navigation For Mixed Human-Robot Teams Using Haptic FeedbackDocument12 pagesCooperative Navigation For Mixed Human-Robot Teams Using Haptic FeedbackMahdi LabedNo ratings yet
- Control and Simulation of A 6-DOF Biped Robot Based On Twin Delayed Deep Deterministic Policy Gradient AlgorithmDocument12 pagesControl and Simulation of A 6-DOF Biped Robot Based On Twin Delayed Deep Deterministic Policy Gradient AlgorithmrajhanschinmayNo ratings yet
- Artificial Intelligence Based Mobile RobotDocument19 pagesArtificial Intelligence Based Mobile RobotIJRASETPublicationsNo ratings yet
- Fruit Picking Robot Arm Training Solution Based On Reinforcement Learning in Digital TwinDocument22 pagesFruit Picking Robot Arm Training Solution Based On Reinforcement Learning in Digital TwinT V VaisakhNo ratings yet
- Physics Rough DraftDocument23 pagesPhysics Rough DraftDinesh DammalapatiNo ratings yet
- TopicsDocument72 pagesTopicsravikumar rayalaNo ratings yet
- Romero2017 Article CanLow-costMotion-trackingSystDocument14 pagesRomero2017 Article CanLow-costMotion-trackingSystJkyta2712No ratings yet
- Sensors: A Human Support Robot For The Cleaning and Maintenance of Door Handles Using A Deep-Learning FrameworkDocument18 pagesSensors: A Human Support Robot For The Cleaning and Maintenance of Door Handles Using A Deep-Learning FrameworkShahrukh PatelNo ratings yet
- Robotics Harik - 2018Document20 pagesRobotics Harik - 2018Vänhëë ËscöbärNo ratings yet
- Humanoid RobotsDocument35 pagesHumanoid RobotsNeena Jain75% (4)
- Bluetooth Based Employee Mobile Tracking Using Android ApplicationDocument3 pagesBluetooth Based Employee Mobile Tracking Using Android ApplicationShaka TechnologiesNo ratings yet
- Computer Vision and Image Understanding: Gerard Canal, Sergio Escalera, Cecilio AnguloDocument13 pagesComputer Vision and Image Understanding: Gerard Canal, Sergio Escalera, Cecilio AnguloSudheer KumarNo ratings yet
- Hand GestureDocument28 pagesHand GestureMelchi Sedak100% (2)
- Discovering Spatiotemporal Mobility Profiles of Cellphone UsersDocument9 pagesDiscovering Spatiotemporal Mobility Profiles of Cellphone UsersNur AfiyatNo ratings yet
- Analysis and Application Research of Mobile RobotDocument5 pagesAnalysis and Application Research of Mobile RobotermaNo ratings yet
- Robot PerceptionDocument19 pagesRobot PerceptionRutvik JoshiNo ratings yet
- Task October 15-16 (ACTION PLAN) Answer of I.1Document6 pagesTask October 15-16 (ACTION PLAN) Answer of I.1Mera Largosa ManlaweNo ratings yet
- Task 7 LPDocument13 pagesTask 7 LPMera Largosa ManlaweNo ratings yet
- Reflection 1Document1 pageReflection 1Mera Largosa ManlaweNo ratings yet
- Ass. Pros and ConsDocument1 pageAss. Pros and ConsMera Largosa ManlaweNo ratings yet
- Task 9..three-Way Venn DiagramDocument1 pageTask 9..three-Way Venn DiagramMera Largosa ManlaweNo ratings yet
- Task October 15 IIDocument2 pagesTask October 15 IIMera Largosa ManlaweNo ratings yet
- Task October 15 Answer of III.2Document1 pageTask October 15 Answer of III.2Mera Largosa ManlaweNo ratings yet
- Task 10Document1 pageTask 10Mera Largosa ManlaweNo ratings yet
- Task 8Document1 pageTask 8Mera Largosa ManlaweNo ratings yet
- Task 5-III.1Document3 pagesTask 5-III.1Mera Largosa ManlaweNo ratings yet
- ReflectionDocument3 pagesReflectionMera Largosa ManlaweNo ratings yet
- Law 2Document3 pagesLaw 2Mera Largosa ManlaweNo ratings yet
- Reflection 2 NOT FINALDocument1 pageReflection 2 NOT FINALMera Largosa ManlaweNo ratings yet
- Reflection 2Document1 pageReflection 2Mera Largosa ManlaweNo ratings yet
- Speech On Viewing SkillsDocument1 pageSpeech On Viewing SkillsMera Largosa ManlaweNo ratings yet
- Module 1: MixturesDocument3 pagesModule 1: MixturesMera Largosa ManlaweNo ratings yet
- Esports NewsDocument2 pagesEsports NewsMera Largosa ManlaweNo ratings yet
- Mapeh 7 Health Module 1-4 AssessmentDocument2 pagesMapeh 7 Health Module 1-4 AssessmentMera Largosa ManlaweNo ratings yet
- Performance 2ND QuarterDocument2 pagesPerformance 2ND QuarterMera Largosa ManlaweNo ratings yet
- 500 Words PandemicDocument1 page500 Words PandemicMera Largosa ManlaweNo ratings yet
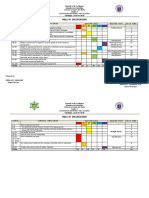
- Table of Specifications: Item No. Language Competencies Question Levels Question Type/S No. of Items R U AP AN E CDocument5 pagesTable of Specifications: Item No. Language Competencies Question Levels Question Type/S No. of Items R U AP AN E CMera Largosa ManlaweNo ratings yet
- g2 Performance TaskDocument5 pagesg2 Performance TaskMera Largosa ManlaweNo ratings yet
- Lesson Plan in English 8: I. ObjectiveDocument4 pagesLesson Plan in English 8: I. ObjectiveMera Largosa ManlaweNo ratings yet
- Places Description: How Does The Author Feel About Singapore?Document2 pagesPlaces Description: How Does The Author Feel About Singapore?Mera Largosa ManlaweNo ratings yet
- Using Context Clues To Get MeaningDocument4 pagesUsing Context Clues To Get MeaningMera Largosa ManlaweNo ratings yet
- Lera Jane T. Salvador: Queen of Hearts 2020Document1 pageLera Jane T. Salvador: Queen of Hearts 2020Mera Largosa ManlaweNo ratings yet
- A Lesson Plan in English 8: Senses - CFMDocument5 pagesA Lesson Plan in English 8: Senses - CFMMera Largosa ManlaweNo ratings yet
- Most Essential LCs Media and Information LiteracyDocument2 pagesMost Essential LCs Media and Information LiteracyMera Largosa ManlaweNo ratings yet
- Individual Performance Commitment and Review Form (Ipcrf) For Teacher I - IiiDocument13 pagesIndividual Performance Commitment and Review Form (Ipcrf) For Teacher I - IiiMera Largosa ManlaweNo ratings yet
- Jensen: Unit 4 Pretest ReviewDocument11 pagesJensen: Unit 4 Pretest ReviewKarma TenzinNo ratings yet
- Value Educatvdffion Mcqs Part 1Document20 pagesValue Educatvdffion Mcqs Part 1virupakshaNo ratings yet
- Skull Crusher-13 Class XI JEE (Adv) PhysicsDocument3 pagesSkull Crusher-13 Class XI JEE (Adv) Physicsdarling dean100% (1)
- Computer Programming: Labeling The Text OCC101Document8 pagesComputer Programming: Labeling The Text OCC101Marygin Esplana SarmientoNo ratings yet
- Schmidt Bender Catalog 2020 en USDocument48 pagesSchmidt Bender Catalog 2020 en USKyle YangNo ratings yet
- Chemical Process Control An IntroductionDocument376 pagesChemical Process Control An IntroductionNicolò OngaroNo ratings yet
- Application of Derivatives - JEE (Main) - 2024Document77 pagesApplication of Derivatives - JEE (Main) - 2024Ritheesh NagarajanNo ratings yet
- English 8 Q2 M1Document28 pagesEnglish 8 Q2 M1Rachelle Ann R PetronioNo ratings yet
- Letting Go of Stress, Anxiety, and Fear During Study and Test TakingDocument3 pagesLetting Go of Stress, Anxiety, and Fear During Study and Test TakingRamonNo ratings yet
- Line Pipe Dimensional TolerenceDocument1 pageLine Pipe Dimensional Tolerencesudeep dsouzaNo ratings yet
- Ug Catalog 21-22 0Document243 pagesUg Catalog 21-22 0Faisal Abdul MalakNo ratings yet
- Payback BC MethodDocument1 pagePayback BC MethodJam LarsonNo ratings yet
- Organic Chemistry Problem SetDocument10 pagesOrganic Chemistry Problem SetBermonica Alvior SatuitoNo ratings yet
- Mathematics: Primary: EYFS, Key Stage 1, Key Stage 2Document38 pagesMathematics: Primary: EYFS, Key Stage 1, Key Stage 2Mihaela AnticiNo ratings yet
- DeGuzman Joshua Rae PayrollDocument6 pagesDeGuzman Joshua Rae PayrollHero CourseNo ratings yet
- Qualitative Analysis of Cations: Insoluble ChloridesDocument1 pageQualitative Analysis of Cations: Insoluble Chlorideskemhar jaminulNo ratings yet
- 2305 10510Document12 pages2305 10510avillenaNo ratings yet
- Pittclad 316S PDS 7.13.21Document4 pagesPittclad 316S PDS 7.13.21MassimoPartipiloNo ratings yet
- Allen and Ors V ACT Planning and Land AuthorityDocument76 pagesAllen and Ors V ACT Planning and Land AuthorityToby VueNo ratings yet
- The Performance SpaceDocument2 pagesThe Performance Space곽수진No ratings yet
- EPC Lab (BE303) - 2022 Scheme !ST Cycle ExperimentsDocument51 pagesEPC Lab (BE303) - 2022 Scheme !ST Cycle Experimentsm1947ashaNo ratings yet
- The World of Lapp: Innovations 2017 18Document48 pagesThe World of Lapp: Innovations 2017 18Andrew LowNo ratings yet
- English FAL P2 Feb-March 2015 MemoDocument24 pagesEnglish FAL P2 Feb-March 2015 MemoRoxanneNo ratings yet
- LOG708 Applied Statistics 4 Feb 2021Document9 pagesLOG708 Applied Statistics 4 Feb 2021Mahbub Hasan YenNo ratings yet
- Chemistry: Curriculum and Syllabus For Classes Xi & XiiDocument11 pagesChemistry: Curriculum and Syllabus For Classes Xi & Xiianon_203482044No ratings yet
- IEEE - 0446 - 1995 (Orange) Emergency and Standby Power SystemsDocument319 pagesIEEE - 0446 - 1995 (Orange) Emergency and Standby Power SystemsJOHAN ARLEY DELGADO VARGAS100% (3)
- Module 1: Introduction Lessons:: Definition and Importance of Ab Engineering and Republic Act No. 10915Document7 pagesModule 1: Introduction Lessons:: Definition and Importance of Ab Engineering and Republic Act No. 10915Polo Cruz100% (2)