
Hysteresis Motor
Hysteresis Motor
You might also like
- Presentation of Electric MotorDocument20 pagesPresentation of Electric MotorRicky Raj100% (2)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- 24 Hysteresis-Motors Reference PDFDocument5 pages24 Hysteresis-Motors Reference PDFFariba Islam100% (2)
- Synchronous MotorDocument8 pagesSynchronous MotorMsKaroly100% (1)
- Manual SonicLockDocument5 pagesManual SonicLockToine ZxyNo ratings yet
- Gujarat Boiler Examination Board Boiler Operation Engineer Exam-2017Document6 pagesGujarat Boiler Examination Board Boiler Operation Engineer Exam-2017Alok Doshi100% (1)
- IPS120-10 Superconducting Magnet Power Supplies ManualDocument86 pagesIPS120-10 Superconducting Magnet Power Supplies ManualoybpviskNo ratings yet
- What Is Hysteresis MotorDocument14 pagesWhat Is Hysteresis MotorxtrmwrldNo ratings yet
- Synchronous Motor Hysteresis Losses Ferromagnetic MaterialDocument4 pagesSynchronous Motor Hysteresis Losses Ferromagnetic MaterialRagunathan NarayananNo ratings yet
- Hysteresis Motor: Working Principle & ApplicationsDocument6 pagesHysteresis Motor: Working Principle & ApplicationsSourav KumarNo ratings yet
- Group Number 05 AssignmentDocument14 pagesGroup Number 05 AssignmentYasin OmaryNo ratings yet
- Hysteresis MotorsDocument13 pagesHysteresis MotorsDivyansh GoyalNo ratings yet
- Unit 5 Special Electr UmasnkarDocument3 pagesUnit 5 Special Electr UmasnkarvlkumashankardeekshithNo ratings yet
- Three Phase Induction MotorDocument22 pagesThree Phase Induction MotorHabteNo ratings yet
- Lecture 6 - Induction MotorsDocument34 pagesLecture 6 - Induction Motorsswamy_satya20004521No ratings yet
- Assignment 6 VincoyDocument16 pagesAssignment 6 VincoyVincoy JohnlloydNo ratings yet
- MotorsDocument25 pagesMotorsAyush SrivastavaNo ratings yet
- Hysteresis MotorDocument14 pagesHysteresis Motorpartha DasNo ratings yet
- Topic 1Document20 pagesTopic 1Ʋiŋêet ḠåuṯḁmNo ratings yet
- Three Phase Synchronous Machines - 2015Document93 pagesThree Phase Synchronous Machines - 2015आश्विन मरहट्टाNo ratings yet
- Induction Motor BalaDocument8 pagesInduction Motor Baladinesh11rNo ratings yet
- Content Beyond The Syllabus Unit 1Document5 pagesContent Beyond The Syllabus Unit 1ANBARASU LNo ratings yet
- Modeling of Hysteresis Motor: Aishwarya Dhanagare, A.G.ThosarDocument8 pagesModeling of Hysteresis Motor: Aishwarya Dhanagare, A.G.ThosarLoli SyNo ratings yet
- Brushless DC MotorDocument13 pagesBrushless DC MotorYova PrameswariNo ratings yet
- A Synchronous Motor From A Hammond OrganDocument8 pagesA Synchronous Motor From A Hammond Organsiva prakashNo ratings yet
- Wind Turbine Generator - SynchronousDocument21 pagesWind Turbine Generator - SynchronousTahsin IbtidaNo ratings yet
- Synchronous Motor - Wikipedia, The Free EncyclopediaDocument10 pagesSynchronous Motor - Wikipedia, The Free EncyclopediaJoshua PohanNo ratings yet
- Motors and LoadsDocument24 pagesMotors and Loadsmanukjoy007No ratings yet
- 1 Single-Phase Motor 2020Document22 pages1 Single-Phase Motor 2020SerajNo ratings yet
- Universal Moto1Document12 pagesUniversal Moto1Saim MollahNo ratings yet
- Induction Motor: Citations VerificationDocument11 pagesInduction Motor: Citations VerificationChamika Dilshan WickramawardenaNo ratings yet
- Poly-Phase Induction MotorDocument27 pagesPoly-Phase Induction Motorjaveria zafeerNo ratings yet
- Reluctance MotorDocument14 pagesReluctance Motortheodorakis017781No ratings yet
- Induction Motor - Wikipedia, The Free EncyclopediaDocument11 pagesInduction Motor - Wikipedia, The Free Encyclopediaak_thimiriNo ratings yet
- Induction MotorDocument114 pagesInduction MotorNesarkiran BagadeNo ratings yet
- Induction MotorDocument14 pagesInduction Motorhamba0007No ratings yet
- Synchronous MotorDocument14 pagesSynchronous MotorVishnu Nayak100% (2)
- Cylindrical Construction: (A) Outside Rotor, (B) Inside Rotor.cDocument4 pagesCylindrical Construction: (A) Outside Rotor, (B) Inside Rotor.cChristian Camilo RodriguezNo ratings yet
- Applied Directly To The Stator WindingsDocument53 pagesApplied Directly To The Stator WindingsSew HunNo ratings yet
- Unit 1Document25 pagesUnit 1papkarthikNo ratings yet
- Reluctance & Hysteresis MotorDocument3 pagesReluctance & Hysteresis MotorDina Garan0% (1)
- Unit-5 SMDocument27 pagesUnit-5 SMShaik ShaheenaNo ratings yet
- DC Brush Motor TheoryDocument7 pagesDC Brush Motor Theoryjfsmenezes4534No ratings yet
- Generator TheoryDocument4 pagesGenerator TheoryRachit KhannaNo ratings yet
- Polyphase Induction MotorDocument38 pagesPolyphase Induction MotorSaad KhaliqNo ratings yet
- Induction Synchronous MotorsDocument35 pagesInduction Synchronous MotorsDeandre LaingNo ratings yet
- Unit-4 Induction MotorsDocument26 pagesUnit-4 Induction MotorsAnurag Singhal0% (1)
- 3-Phase Induction MotorDocument23 pages3-Phase Induction MotorAshish Verma100% (1)
- Chapter 6 - Induction Motors (Part1)Document18 pagesChapter 6 - Induction Motors (Part1)SanjanaLakshmiNo ratings yet
- Construction of Three Phase Induction MotorDocument18 pagesConstruction of Three Phase Induction MotorRajeev ValunjkarNo ratings yet
- Induction MotorsDocument28 pagesInduction MotorsKimsairng CheaNo ratings yet
- 185 - EE8005, EE6703 Special Electrical Machines - Question BankDocument15 pages185 - EE8005, EE6703 Special Electrical Machines - Question BankNiteshNarukaNo ratings yet
- Chapter3 Inductionmachine 110625084515 Phpapp01Document25 pagesChapter3 Inductionmachine 110625084515 Phpapp01Ibrahim HussainNo ratings yet
- Free-Samples Amie Chapters Single Phase Induction MotorsDocument19 pagesFree-Samples Amie Chapters Single Phase Induction MotorsStitch BeatzNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Engineering Vibroacoustic Analysis: Methods and ApplicationsFrom EverandEngineering Vibroacoustic Analysis: Methods and ApplicationsStephen A. HambricNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Southern Marine Engineering Desk Reference: Second Edition Volume IiFrom EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiNo ratings yet
- CTS - VerbalDocument83 pagesCTS - Verbalkajal aggarwalNo ratings yet
- Ee 8701 Hve Unit-1Document56 pagesEe 8701 Hve Unit-1kajal aggarwalNo ratings yet
- PDF&Rendition 1Document84 pagesPDF&Rendition 1kajal aggarwalNo ratings yet
- Pdf&rendition 1Document43 pagesPdf&rendition 1kajal aggarwalNo ratings yet
- Toprak Home PageDocument6 pagesToprak Home Pageselmir_9No ratings yet
- In Uence of Voltage Dips On Industrial Equipment: Analysis and AssessmentDocument10 pagesIn Uence of Voltage Dips On Industrial Equipment: Analysis and AssessmentAndita Nastasia LazuardiNo ratings yet
- Corrosion PDFDocument22 pagesCorrosion PDFVishal ThakareNo ratings yet
- Indonesia RTGC Retrifit 22 Unit - NewDocument189 pagesIndonesia RTGC Retrifit 22 Unit - NewMechatronic EngineeringNo ratings yet
- Test Bank For Organic Chemistry 7th Edition BrownDocument21 pagesTest Bank For Organic Chemistry 7th Edition Browna157293279No ratings yet
- ELEC - Multi Family Interior Alterations - 4 Units - 1238Document6 pagesELEC - Multi Family Interior Alterations - 4 Units - 1238Kenneth DomingoNo ratings yet
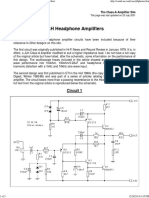
- JLH 1985 HeadphoneDocument5 pagesJLH 1985 HeadphoneDave LeeNo ratings yet
- FRM-Welder Performance Qualification RecordDocument1 pageFRM-Welder Performance Qualification RecordraofrhanNo ratings yet
- Pedrollo-Future Jet-St en 50hzDocument4 pagesPedrollo-Future Jet-St en 50hzDaniel OwusuNo ratings yet
- Block Diagram For Normal Stop & Emergency Stop of Level 123Document1 pageBlock Diagram For Normal Stop & Emergency Stop of Level 123nguyen rinNo ratings yet
- Metering Pumps: Models A and BDocument5 pagesMetering Pumps: Models A and Bbmanojkumar16No ratings yet
- En 600ugStepUpSine 1Document35 pagesEn 600ugStepUpSine 1cristian mauricio calderon escobarNo ratings yet
- Synchronous ServomotorsDocument108 pagesSynchronous ServomotorsjonNo ratings yet
- Breaker Templates For CIMug PostingDocument48 pagesBreaker Templates For CIMug PostingIgor SangulinNo ratings yet
- GMPC Enables Energy Transmission Over Interconnected SAPP GridDocument8 pagesGMPC Enables Energy Transmission Over Interconnected SAPP GridNhacaNo ratings yet
- Pump Selection: Examples of Centrifugal PumpsDocument18 pagesPump Selection: Examples of Centrifugal Pumpscs100% (1)
- Refinery ModelDocument10 pagesRefinery ModelEdgar Perea LópezNo ratings yet
- DS6213 Standard EU enDocument5 pagesDS6213 Standard EU enwinwin2302No ratings yet
- Lecture 6Document31 pagesLecture 6sohaibNo ratings yet
- Joint Statement-Extension of The Temporary Reduction in The General Fuel LevyDocument2 pagesJoint Statement-Extension of The Temporary Reduction in The General Fuel LevyeNCA.comNo ratings yet
- LPK 909ex Bs-Iii: (Parts List)Document216 pagesLPK 909ex Bs-Iii: (Parts List)shivamNo ratings yet
- HTWL Service Manual: Failure ListDocument2 pagesHTWL Service Manual: Failure ListClaudio Valencia MarínNo ratings yet
- H-W Insulating MonolithsDocument3 pagesH-W Insulating Monolithschandirandelhi100% (1)
- K20 Engine Control Module X3Document4 pagesK20 Engine Control Module X3Data TécnicaNo ratings yet
- BastacollaDocument205 pagesBastacollaAbhijeetNo ratings yet
- SolarDocument33 pagesSolaranon_983696239100% (1)
- CHI Control-Earth Leakage Relays AW V10 LR 30 11 12Document4 pagesCHI Control-Earth Leakage Relays AW V10 LR 30 11 12Sidhartha MallickNo ratings yet




























































































Download as docx, pdf, or txt
You might also like
- Presentation of Electric MotorDocument20 pagesPresentation of Electric MotorRicky Raj100% (2)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- 24 Hysteresis-Motors Reference PDFDocument5 pages24 Hysteresis-Motors Reference PDFFariba Islam100% (2)
- Synchronous MotorDocument8 pagesSynchronous MotorMsKaroly100% (1)
- Manual SonicLockDocument5 pagesManual SonicLockToine ZxyNo ratings yet
- Gujarat Boiler Examination Board Boiler Operation Engineer Exam-2017Document6 pagesGujarat Boiler Examination Board Boiler Operation Engineer Exam-2017Alok Doshi100% (1)
- IPS120-10 Superconducting Magnet Power Supplies ManualDocument86 pagesIPS120-10 Superconducting Magnet Power Supplies ManualoybpviskNo ratings yet
- What Is Hysteresis MotorDocument14 pagesWhat Is Hysteresis MotorxtrmwrldNo ratings yet
- Synchronous Motor Hysteresis Losses Ferromagnetic MaterialDocument4 pagesSynchronous Motor Hysteresis Losses Ferromagnetic MaterialRagunathan NarayananNo ratings yet
- Hysteresis Motor: Working Principle & ApplicationsDocument6 pagesHysteresis Motor: Working Principle & ApplicationsSourav KumarNo ratings yet
- Group Number 05 AssignmentDocument14 pagesGroup Number 05 AssignmentYasin OmaryNo ratings yet
- Hysteresis MotorsDocument13 pagesHysteresis MotorsDivyansh GoyalNo ratings yet
- Unit 5 Special Electr UmasnkarDocument3 pagesUnit 5 Special Electr UmasnkarvlkumashankardeekshithNo ratings yet
- Three Phase Induction MotorDocument22 pagesThree Phase Induction MotorHabteNo ratings yet
- Lecture 6 - Induction MotorsDocument34 pagesLecture 6 - Induction Motorsswamy_satya20004521No ratings yet
- Assignment 6 VincoyDocument16 pagesAssignment 6 VincoyVincoy JohnlloydNo ratings yet
- MotorsDocument25 pagesMotorsAyush SrivastavaNo ratings yet
- Hysteresis MotorDocument14 pagesHysteresis Motorpartha DasNo ratings yet
- Topic 1Document20 pagesTopic 1Ʋiŋêet ḠåuṯḁmNo ratings yet
- Three Phase Synchronous Machines - 2015Document93 pagesThree Phase Synchronous Machines - 2015आश्विन मरहट्टाNo ratings yet
- Induction Motor BalaDocument8 pagesInduction Motor Baladinesh11rNo ratings yet
- Content Beyond The Syllabus Unit 1Document5 pagesContent Beyond The Syllabus Unit 1ANBARASU LNo ratings yet
- Modeling of Hysteresis Motor: Aishwarya Dhanagare, A.G.ThosarDocument8 pagesModeling of Hysteresis Motor: Aishwarya Dhanagare, A.G.ThosarLoli SyNo ratings yet
- Brushless DC MotorDocument13 pagesBrushless DC MotorYova PrameswariNo ratings yet
- A Synchronous Motor From A Hammond OrganDocument8 pagesA Synchronous Motor From A Hammond Organsiva prakashNo ratings yet
- Wind Turbine Generator - SynchronousDocument21 pagesWind Turbine Generator - SynchronousTahsin IbtidaNo ratings yet
- Synchronous Motor - Wikipedia, The Free EncyclopediaDocument10 pagesSynchronous Motor - Wikipedia, The Free EncyclopediaJoshua PohanNo ratings yet
- Motors and LoadsDocument24 pagesMotors and Loadsmanukjoy007No ratings yet
- 1 Single-Phase Motor 2020Document22 pages1 Single-Phase Motor 2020SerajNo ratings yet
- Universal Moto1Document12 pagesUniversal Moto1Saim MollahNo ratings yet
- Induction Motor: Citations VerificationDocument11 pagesInduction Motor: Citations VerificationChamika Dilshan WickramawardenaNo ratings yet
- Poly-Phase Induction MotorDocument27 pagesPoly-Phase Induction Motorjaveria zafeerNo ratings yet
- Reluctance MotorDocument14 pagesReluctance Motortheodorakis017781No ratings yet
- Induction Motor - Wikipedia, The Free EncyclopediaDocument11 pagesInduction Motor - Wikipedia, The Free Encyclopediaak_thimiriNo ratings yet
- Induction MotorDocument114 pagesInduction MotorNesarkiran BagadeNo ratings yet
- Induction MotorDocument14 pagesInduction Motorhamba0007No ratings yet
- Synchronous MotorDocument14 pagesSynchronous MotorVishnu Nayak100% (2)
- Cylindrical Construction: (A) Outside Rotor, (B) Inside Rotor.cDocument4 pagesCylindrical Construction: (A) Outside Rotor, (B) Inside Rotor.cChristian Camilo RodriguezNo ratings yet
- Applied Directly To The Stator WindingsDocument53 pagesApplied Directly To The Stator WindingsSew HunNo ratings yet
- Unit 1Document25 pagesUnit 1papkarthikNo ratings yet
- Reluctance & Hysteresis MotorDocument3 pagesReluctance & Hysteresis MotorDina Garan0% (1)
- Unit-5 SMDocument27 pagesUnit-5 SMShaik ShaheenaNo ratings yet
- DC Brush Motor TheoryDocument7 pagesDC Brush Motor Theoryjfsmenezes4534No ratings yet
- Generator TheoryDocument4 pagesGenerator TheoryRachit KhannaNo ratings yet
- Polyphase Induction MotorDocument38 pagesPolyphase Induction MotorSaad KhaliqNo ratings yet
- Induction Synchronous MotorsDocument35 pagesInduction Synchronous MotorsDeandre LaingNo ratings yet
- Unit-4 Induction MotorsDocument26 pagesUnit-4 Induction MotorsAnurag Singhal0% (1)
- 3-Phase Induction MotorDocument23 pages3-Phase Induction MotorAshish Verma100% (1)
- Chapter 6 - Induction Motors (Part1)Document18 pagesChapter 6 - Induction Motors (Part1)SanjanaLakshmiNo ratings yet
- Construction of Three Phase Induction MotorDocument18 pagesConstruction of Three Phase Induction MotorRajeev ValunjkarNo ratings yet
- Induction MotorsDocument28 pagesInduction MotorsKimsairng CheaNo ratings yet
- 185 - EE8005, EE6703 Special Electrical Machines - Question BankDocument15 pages185 - EE8005, EE6703 Special Electrical Machines - Question BankNiteshNarukaNo ratings yet
- Chapter3 Inductionmachine 110625084515 Phpapp01Document25 pagesChapter3 Inductionmachine 110625084515 Phpapp01Ibrahim HussainNo ratings yet
- Free-Samples Amie Chapters Single Phase Induction MotorsDocument19 pagesFree-Samples Amie Chapters Single Phase Induction MotorsStitch BeatzNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Engineering Vibroacoustic Analysis: Methods and ApplicationsFrom EverandEngineering Vibroacoustic Analysis: Methods and ApplicationsStephen A. HambricNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Southern Marine Engineering Desk Reference: Second Edition Volume IiFrom EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiNo ratings yet
- CTS - VerbalDocument83 pagesCTS - Verbalkajal aggarwalNo ratings yet
- Ee 8701 Hve Unit-1Document56 pagesEe 8701 Hve Unit-1kajal aggarwalNo ratings yet
- PDF&Rendition 1Document84 pagesPDF&Rendition 1kajal aggarwalNo ratings yet
- Pdf&rendition 1Document43 pagesPdf&rendition 1kajal aggarwalNo ratings yet
- Toprak Home PageDocument6 pagesToprak Home Pageselmir_9No ratings yet
- In Uence of Voltage Dips On Industrial Equipment: Analysis and AssessmentDocument10 pagesIn Uence of Voltage Dips On Industrial Equipment: Analysis and AssessmentAndita Nastasia LazuardiNo ratings yet
- Corrosion PDFDocument22 pagesCorrosion PDFVishal ThakareNo ratings yet
- Indonesia RTGC Retrifit 22 Unit - NewDocument189 pagesIndonesia RTGC Retrifit 22 Unit - NewMechatronic EngineeringNo ratings yet
- Test Bank For Organic Chemistry 7th Edition BrownDocument21 pagesTest Bank For Organic Chemistry 7th Edition Browna157293279No ratings yet
- ELEC - Multi Family Interior Alterations - 4 Units - 1238Document6 pagesELEC - Multi Family Interior Alterations - 4 Units - 1238Kenneth DomingoNo ratings yet
- JLH 1985 HeadphoneDocument5 pagesJLH 1985 HeadphoneDave LeeNo ratings yet
- FRM-Welder Performance Qualification RecordDocument1 pageFRM-Welder Performance Qualification RecordraofrhanNo ratings yet
- Pedrollo-Future Jet-St en 50hzDocument4 pagesPedrollo-Future Jet-St en 50hzDaniel OwusuNo ratings yet
- Block Diagram For Normal Stop & Emergency Stop of Level 123Document1 pageBlock Diagram For Normal Stop & Emergency Stop of Level 123nguyen rinNo ratings yet
- Metering Pumps: Models A and BDocument5 pagesMetering Pumps: Models A and Bbmanojkumar16No ratings yet
- En 600ugStepUpSine 1Document35 pagesEn 600ugStepUpSine 1cristian mauricio calderon escobarNo ratings yet
- Synchronous ServomotorsDocument108 pagesSynchronous ServomotorsjonNo ratings yet
- Breaker Templates For CIMug PostingDocument48 pagesBreaker Templates For CIMug PostingIgor SangulinNo ratings yet
- GMPC Enables Energy Transmission Over Interconnected SAPP GridDocument8 pagesGMPC Enables Energy Transmission Over Interconnected SAPP GridNhacaNo ratings yet
- Pump Selection: Examples of Centrifugal PumpsDocument18 pagesPump Selection: Examples of Centrifugal Pumpscs100% (1)
- Refinery ModelDocument10 pagesRefinery ModelEdgar Perea LópezNo ratings yet
- DS6213 Standard EU enDocument5 pagesDS6213 Standard EU enwinwin2302No ratings yet
- Lecture 6Document31 pagesLecture 6sohaibNo ratings yet
- Joint Statement-Extension of The Temporary Reduction in The General Fuel LevyDocument2 pagesJoint Statement-Extension of The Temporary Reduction in The General Fuel LevyeNCA.comNo ratings yet
- LPK 909ex Bs-Iii: (Parts List)Document216 pagesLPK 909ex Bs-Iii: (Parts List)shivamNo ratings yet
- HTWL Service Manual: Failure ListDocument2 pagesHTWL Service Manual: Failure ListClaudio Valencia MarínNo ratings yet
- H-W Insulating MonolithsDocument3 pagesH-W Insulating Monolithschandirandelhi100% (1)
- K20 Engine Control Module X3Document4 pagesK20 Engine Control Module X3Data TécnicaNo ratings yet
- BastacollaDocument205 pagesBastacollaAbhijeetNo ratings yet
- SolarDocument33 pagesSolaranon_983696239100% (1)
- CHI Control-Earth Leakage Relays AW V10 LR 30 11 12Document4 pagesCHI Control-Earth Leakage Relays AW V10 LR 30 11 12Sidhartha MallickNo ratings yet