Download as pdf or txt
You might also like
- TREADMILL PPT Final Year ProjectDocument13 pagesTREADMILL PPT Final Year ProjectNagabhushana50% (2)
- DDR N°1 - Atk29 - TP180 - 08022017Document3 pagesDDR N°1 - Atk29 - TP180 - 08022017Nour MohammedNo ratings yet
- PDC CatalogDocument32 pagesPDC Catalogruzzo2003No ratings yet
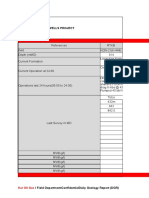
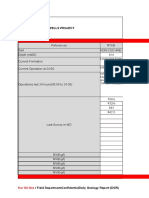
- Khurmala Field Field Department Drilling Deve. Oil Wells Project TU LocationDocument9 pagesKhurmala Field Field Department Drilling Deve. Oil Wells Project TU Locationahmed1adnan-10No ratings yet
- Da13 DDR N1 13991116 143 0Document3 pagesDa13 DDR N1 13991116 143 0Hamed NazariNo ratings yet
- Notes 4Document18 pagesNotes 4Ruben ChirinosNo ratings yet
- Shock Tool Manual PDFDocument23 pagesShock Tool Manual PDFAbboud KingNo ratings yet
- RIG: F28 Shock Sub: OD (Inch) ID (Inch) Length (M) Thread S950024 6-1/8" 9-1/2" 2-7/8" 7-5/8"Document16 pagesRIG: F28 Shock Sub: OD (Inch) ID (Inch) Length (M) Thread S950024 6-1/8" 9-1/2" 2-7/8" 7-5/8"berrouiNo ratings yet
- Da13 DDR N1 14000104 191 0Document3 pagesDa13 DDR N1 14000104 191 0Hamed NazariNo ratings yet
- 0068 - POOH Dual String Completion TubingDocument3 pages0068 - POOH Dual String Completion TubingDrillerNo ratings yet
- Mizzen L-11 - End of Well Report - INV - 032042 642 PDFDocument1 pageMizzen L-11 - End of Well Report - INV - 032042 642 PDFKevin MuellerNo ratings yet
- Chapter 4-CDocument15 pagesChapter 4-CMahrouz MadoNo ratings yet
- DMR-1. Dated 9-10-2022Document1 pageDMR-1. Dated 9-10-2022Gulzar AhmedNo ratings yet
- 7 X 9.625 With TSP, DWPDocument5 pages7 X 9.625 With TSP, DWPRahima RahoumaNo ratings yet
- Pre Recorded Imformation: Davis Family 1-42Document10 pagesPre Recorded Imformation: Davis Family 1-42scrbdgharaviNo ratings yet
- Tech Drilling Cementing CalculationsDocument0 pagesTech Drilling Cementing Calculationsadvantage025No ratings yet
- Khurmala Field Field Department Drilling Deve. Oil Wells Project TU LocationDocument9 pagesKhurmala Field Field Department Drilling Deve. Oil Wells Project TU LocationAhmedNo ratings yet
- Programa Completo Completacion InicialDocument23 pagesPrograma Completo Completacion InicialAlejandro JaramilloNo ratings yet
- Cleaning Plan: Any Question Ask Mud Engineers (24hours) Mohamed Attwa&ahmedDocument1 pageCleaning Plan: Any Question Ask Mud Engineers (24hours) Mohamed Attwa&ahmedMohamed AbozeimaNo ratings yet
- PillsDocument4 pagesPillsbestman82No ratings yet
- BP Shell Chevron Conocophillips Marathon Total Schlumberger Imperial College, London Heriot Watt University, Edinburgh (Anywhere in Article)Document42 pagesBP Shell Chevron Conocophillips Marathon Total Schlumberger Imperial College, London Heriot Watt University, Edinburgh (Anywhere in Article)Doppler KenzoNo ratings yet
- Make Up TorqueDocument1 pageMake Up TorqueNicasio AlonzoNo ratings yet
- SD-24P Bit Record 2Document1 pageSD-24P Bit Record 2Them Bui XuanNo ratings yet
- 16.TDI FCR Data 9.625 43.50 PPF P110 BTC Rev.7Document1 page16.TDI FCR Data 9.625 43.50 PPF P110 BTC Rev.7javier monteroNo ratings yet
- Bit RecordDocument1 pageBit RecordstevebeardsleyNo ratings yet
- By-24 DMR 2013-05-18 G2Document1 pageBy-24 DMR 2013-05-18 G2Iqbal KarimNo ratings yet
- Morning Report 19 - 24 April 2012Document3 pagesMorning Report 19 - 24 April 2012tolstoy potemkinNo ratings yet
- Stab-In Casing Cementing Job Risk AssessmentDocument2 pagesStab-In Casing Cementing Job Risk AssessmentIbnu HasanNo ratings yet
- Well Data Summary ProgramDocument13 pagesWell Data Summary ProgramTemitope BelloNo ratings yet
- Vibration Corrective Action Chart: Observation Typical Environment Short Term Corrective Action Long Term Counter MeasureDocument1 pageVibration Corrective Action Chart: Observation Typical Environment Short Term Corrective Action Long Term Counter Measuresaeed65No ratings yet
- Leak-Off Test Analysis: Well: RigDocument5 pagesLeak-Off Test Analysis: Well: RigstevebeardsleyNo ratings yet
- Surface Well Control Exercise No. 9 - Principles and Procedures DART Kill SheetDocument18 pagesSurface Well Control Exercise No. 9 - Principles and Procedures DART Kill SheetDanie CoetzerNo ratings yet
- Job Pertamina-Petrochina East Java: Wahdanadi, ErikDocument2 pagesJob Pertamina-Petrochina East Java: Wahdanadi, Erikuli ulinuhaNo ratings yet
- Completion (Natural Flow)Document3 pagesCompletion (Natural Flow)Mohammed Ali YoussefNo ratings yet
- 15 Survey Calculations - QuartzDocument2 pages15 Survey Calculations - QuartzRebarNo ratings yet
- Amal-18 Sta DDR#20 02-03-2020Document30 pagesAmal-18 Sta DDR#20 02-03-2020eng7mohamed7hashimNo ratings yet
- Reaming OperationDocument5 pagesReaming Operationsorangel_123No ratings yet
- 2 Borehole EnlargementDocument10 pages2 Borehole EnlargementpsaumNo ratings yet
- Workover Daily Report WQ1-039Document3 pagesWorkover Daily Report WQ1-039kareem100% (1)
- Basic Drilling Fluid FixDocument24 pagesBasic Drilling Fluid FixDelisNo ratings yet
- IF 834lbf: Rotary Drill BitsDocument1 pageIF 834lbf: Rotary Drill BitsDian SikumbangNo ratings yet
- Trex 01157Document17 pagesTrex 01157OSDocs2012No ratings yet
- CMT Programm Spd18a-07 - 3Document9 pagesCMT Programm Spd18a-07 - 3nabiNo ratings yet
- Da13 DDR N1 13991122 149 0Document3 pagesDa13 DDR N1 13991122 149 0Hamed NazariNo ratings yet
- Iwcf 2007 Halliburton 11 08Document338 pagesIwcf 2007 Halliburton 11 08daniel abiaNo ratings yet
- Herunefer W 13Document3 pagesHerunefer W 13Islam AtifNo ratings yet
- Managed Pressure Drilling Modeling & Simulation (A Case Study)Document8 pagesManaged Pressure Drilling Modeling & Simulation (A Case Study)Mejbahul SarkerNo ratings yet
- Drilling Application: Name of Company: Well Name & Number: DateDocument1 pageDrilling Application: Name of Company: Well Name & Number: Datelaxmikant1983No ratings yet
- Manzalai-07 Daily Mud Report (10!7!20)Document1 pageManzalai-07 Daily Mud Report (10!7!20)Sharjeel AhmedNo ratings yet
- OKW 61 (De Comp.) TimelineDocument6 pagesOKW 61 (De Comp.) TimelineVibhu GuptaNo ratings yet
- Well DataDocument5 pagesWell Datamohamed elshemyNo ratings yet
- HH 83-1D SurveyDocument3 pagesHH 83-1D SurveyMahmoud Ahmed Ali AbdelrazikNo ratings yet
- Bha-1 Wbco Brujo 1 Liner 7-26# 9.625 CGS 47# - FinalDocument2 pagesBha-1 Wbco Brujo 1 Liner 7-26# 9.625 CGS 47# - Finalcarlos vielmaNo ratings yet
- MudLog NEB-85 Scale 200 (130-5325 FT) - April 25th 2018Document30 pagesMudLog NEB-85 Scale 200 (130-5325 FT) - April 25th 2018parama drillingNo ratings yet
- He-E10 Well MontageDocument1 pageHe-E10 Well MontageSaeid OrangiNo ratings yet
- Alaska Drilling and Wells Recommended Practice: CTD Drilling FluidDocument4 pagesAlaska Drilling and Wells Recommended Practice: CTD Drilling FluidAdel Ahmed AlkhaligyNo ratings yet
- Sleeve Stablizer/Thread ProtectorDocument1 pageSleeve Stablizer/Thread ProtectorhamidNo ratings yet
- 16 BHA Tally FormatDocument2 pages16 BHA Tally FormatShraddhanand MoreNo ratings yet
- OMNI Roller ReamerDocument2 pagesOMNI Roller ReamerCaptain NematollahiNo ratings yet
- Daily Drilling Report: Danan Oilfield DevelopmentDocument3 pagesDaily Drilling Report: Danan Oilfield DevelopmentHamed NazariNo ratings yet
- User'S Manual: Bpm-Downhole MotorDocument80 pagesUser'S Manual: Bpm-Downhole MotorXueying LiNo ratings yet
- Serdi 4.5Document4 pagesSerdi 4.5Yeam_90No ratings yet
- M 300 C Specification BrochureDocument3 pagesM 300 C Specification BrochureSouidiNo ratings yet
- COD. 290S: Instructions ManualDocument14 pagesCOD. 290S: Instructions ManualAshrafNo ratings yet
- Dryer Tech SheetDocument12 pagesDryer Tech SheetalanbrannNo ratings yet
- ddsr40 MDDocument2 pagesddsr40 MDVali PopescuNo ratings yet
- Vector Control of Induction Motor Without Shaft EncoderDocument8 pagesVector Control of Induction Motor Without Shaft Encoderapi-3826450No ratings yet
- MME 2019 - Miscellaneous EquipmentDocument95 pagesMME 2019 - Miscellaneous EquipmentLuis AngelNo ratings yet
- Gujarat Technological University: ContentDocument5 pagesGujarat Technological University: ContentKuldeep SinhNo ratings yet
- Kewo AD100 AD350 AD800 VFD CatalogDocument20 pagesKewo AD100 AD350 AD800 VFD CatalogNouman MughalNo ratings yet
- Pass BDocument9 pagesPass BJoel JusayNo ratings yet
- Ba915d 500022218 1703eDocument5 pagesBa915d 500022218 1703eluis torresNo ratings yet
- Works & Head Office:: Lifting SolutionsDocument8 pagesWorks & Head Office:: Lifting SolutionsFiroz PawaskarNo ratings yet
- An Enhanced Simulation Model For DC Motor Belt Drive Conveyor System ControlDocument5 pagesAn Enhanced Simulation Model For DC Motor Belt Drive Conveyor System ControlArif AfifNo ratings yet
- VSSUT SyllabusDocument65 pagesVSSUT SyllabusImtiyaz KhanNo ratings yet
- SR 12615Document1 pageSR 12615Aravindh NagarajNo ratings yet
- Experiment 3 DC Motor Modeling: 3.0 ObjectiveDocument6 pagesExperiment 3 DC Motor Modeling: 3.0 Objectivecomplex72No ratings yet
- Shakti Solar DC Catalogue L6 28dec 2019 PDFDocument96 pagesShakti Solar DC Catalogue L6 28dec 2019 PDFKachesa HakantuNo ratings yet
- 03 - ACS 5000AD TC SW Commissioning ManualDocument76 pages03 - ACS 5000AD TC SW Commissioning ManualserkalemtayeNo ratings yet
- Exhausttransferfans 01acx1004 r3 Catalog PDFDocument64 pagesExhausttransferfans 01acx1004 r3 Catalog PDFJomae FortunaNo ratings yet
- Fault and Alarm DC DRIVESDocument30 pagesFault and Alarm DC DRIVESsumitbahlNo ratings yet
- Ceiling Concealed (Middle Static Pressure Type) : PEFY-P-VMA (L) - E, PEFY-P-VMA3-EDocument54 pagesCeiling Concealed (Middle Static Pressure Type) : PEFY-P-VMA (L) - E, PEFY-P-VMA3-EOvidiu DamianNo ratings yet
- 1.5 3.8t XE Series Electric Forklift With Li Ion TechnologyDocument6 pages1.5 3.8t XE Series Electric Forklift With Li Ion TechnologyScottJacksonNo ratings yet
- Leiten - Manual - Dobladora Velox42Document21 pagesLeiten - Manual - Dobladora Velox42Edson arturo Moncada correaNo ratings yet
- Havells PumpsDocument8 pagesHavells PumpsNAVEEN JATNo ratings yet
- GP 12-01 Power System DesignDocument41 pagesGP 12-01 Power System Designzepol051No ratings yet
- Monthly Self Assessment Report (15!11!2022)Document4 pagesMonthly Self Assessment Report (15!11!2022)Daniel JeremiahNo ratings yet
- Jet - Technical Sheet - EngDocument11 pagesJet - Technical Sheet - EngJairo CarvajalNo ratings yet
- Engine Controls & SensorsDocument6 pagesEngine Controls & Sensorsrudey18No ratings yet
- An Intelligent Control Method For Performance Improvement of PMSMDocument59 pagesAn Intelligent Control Method For Performance Improvement of PMSMDivyaNo ratings yet