Download as pdf or txt
You might also like
- CMPG171: Study Unit 4Document44 pagesCMPG171: Study Unit 4Tshepo OscarNo ratings yet
- NG - Argument Reduction For Huge Arguments: Good To The Last BitDocument8 pagesNG - Argument Reduction For Huge Arguments: Good To The Last BitDerek O'ConnorNo ratings yet
- Silencing A HP DL380 Gen8 - Homelab PDFDocument7 pagesSilencing A HP DL380 Gen8 - Homelab PDFAlexandru Octavian GrosuNo ratings yet
- Lightning Network SlideDocument54 pagesLightning Network SlideEdukasi BitcoinNo ratings yet
- Faster Tensor Manipulation in C++11Document24 pagesFaster Tensor Manipulation in C++11Marko TunjicNo ratings yet
- Calculator ProjectDocument30 pagesCalculator ProjectSugam Dhalla67% (3)
- Fast Inverse Square RootDocument8 pagesFast Inverse Square RootMaxminlevelNo ratings yet
- Floating-Point Inverse Square Root Algorithm Based On Taylor-Series ExpansionDocument5 pagesFloating-Point Inverse Square Root Algorithm Based On Taylor-Series Expansionpradipta.sarkarNo ratings yet
- 3.3 Complexity of Algorithms: ExercisesDocument3 pages3.3 Complexity of Algorithms: Exerciseslixus mwangiNo ratings yet
- Lab Manual 11 DSADocument12 pagesLab Manual 11 DSAinft18111035 KFUEITNo ratings yet
- K. J. Somaiya College of Engineering, Mumbai-77Document7 pagesK. J. Somaiya College of Engineering, Mumbai-77ARNAB DENo ratings yet
- Potential Assignment MCEN90008 2016Document9 pagesPotential Assignment MCEN90008 2016Umar AshrafNo ratings yet
- Cs 316: Algorithms (Introduction) : SPRING 2015Document44 pagesCs 316: Algorithms (Introduction) : SPRING 2015Ahmed KhairyNo ratings yet
- Daa Unit 3Document22 pagesDaa Unit 3Rahul GusainNo ratings yet
- R Basic Easy-2Document64 pagesR Basic Easy-210sgNo ratings yet
- Designing Arithmetic Digital Circuits Via Rewriting-LogicDocument15 pagesDesigning Arithmetic Digital Circuits Via Rewriting-LogicAbhishek TewariNo ratings yet
- Chapter 4..1Document19 pagesChapter 4..1Ed CasasNo ratings yet
- Fast Floating Point Square Root: Thomas F. Hain, David B. MercerDocument7 pagesFast Floating Point Square Root: Thomas F. Hain, David B. MercerValentina NigaNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document6 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Scilab Tutorial Oriented Toward The Practice of Discrete-Time Signal ProcessingDocument21 pagesScilab Tutorial Oriented Toward The Practice of Discrete-Time Signal ProcessingTiago Goncalves GotoNo ratings yet
- Simplification of Ternary Function Using K-Map TechniqueDocument11 pagesSimplification of Ternary Function Using K-Map TechniqueAJER JOURNALNo ratings yet
- Interference and DiffractionDocument16 pagesInterference and DiffractionmumtazaliNo ratings yet
- Lect 0825Document5 pagesLect 0825blabla9999999No ratings yet
- Quadrature em PDFDocument13 pagesQuadrature em PDF青山漫步No ratings yet
- Lee Yang ReportDocument14 pagesLee Yang ReportauroshisdasNo ratings yet
- DAA IA-1 Case Study Material-CSEDocument9 pagesDAA IA-1 Case Study Material-CSEsyed adilNo ratings yet
- DSC I UnitDocument77 pagesDSC I UnitSaiprabhakar DevineniNo ratings yet
- Time of Flight BasicsDocument14 pagesTime of Flight BasicsPirvu CristiNo ratings yet
- Advanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsDocument4 pagesAdvanced Algorithms Course. Lecture Notes. Part 11: Chernoff BoundsKasapaNo ratings yet
- Jim DSA QuestionsDocument26 pagesJim DSA QuestionsTudor CiotloșNo ratings yet
- Elliptic Public Key Cryptosystem Using DHK and Partial Reduction Modulo TechniquesDocument8 pagesElliptic Public Key Cryptosystem Using DHK and Partial Reduction Modulo TechniqueskesavantNo ratings yet
- Wavelets and Image Compression: Vlad Balan, Cosmin Condea January 30, 2003Document20 pagesWavelets and Image Compression: Vlad Balan, Cosmin Condea January 30, 2003Ashish PandeyNo ratings yet
- O'Connor - Common Errors in Numerical ProgrammingDocument17 pagesO'Connor - Common Errors in Numerical ProgrammingDerek O'ConnorNo ratings yet
- Introduction To CFD BasicsDocument21 pagesIntroduction To CFD BasicsNNo ratings yet
- IE684 Lab01Document4 pagesIE684 Lab01Tirthankar AdhikariNo ratings yet
- R Emy Boyer Roland Badeau G Erard Favier: Fast Orthogonal Decomposition of Volterra Cubic Kernels Using Oblique UnfoldingDocument4 pagesR Emy Boyer Roland Badeau G Erard Favier: Fast Orthogonal Decomposition of Volterra Cubic Kernels Using Oblique Unfoldingadam_annieNo ratings yet
- Insem2 SchemeDocument6 pagesInsem2 SchemeBalathrinath ReddyNo ratings yet
- 1-S2.0-S0898122109007263-MainDocument14 pages1-S2.0-S0898122109007263-MainThiago NobreNo ratings yet
- Introduction To Algorithms Second Edition Solutions Manual: Christopher Clark University of Virginia Summer 2010Document9 pagesIntroduction To Algorithms Second Edition Solutions Manual: Christopher Clark University of Virginia Summer 2010Aliga8er0% (1)
- SCILAB Tutorial For DSP PDFDocument21 pagesSCILAB Tutorial For DSP PDFrichardvmorenoNo ratings yet
- 0.1 Worst and Best Case AnalysisDocument6 pages0.1 Worst and Best Case Analysisshashank dwivediNo ratings yet
- Single Variable Unconstrained Optimization Techniques Using Interval AnalysisDocument5 pagesSingle Variable Unconstrained Optimization Techniques Using Interval AnalysisInternational Organization of Scientific Research (IOSR)No ratings yet
- An Evolutionary Algorithm For Minimizing Multimodal FunctionsDocument7 pagesAn Evolutionary Algorithm For Minimizing Multimodal FunctionsSaïd Ben AbdallahNo ratings yet
- Kevin Juandi. Project 066Document16 pagesKevin Juandi. Project 066趙子賢No ratings yet
- Adrian Silvescu - Fourier Neural Networks (Article)Document10 pagesAdrian Silvescu - Fourier Neural Networks (Article)johnsmithxxNo ratings yet
- Chapter Parallel Prefix SumDocument21 pagesChapter Parallel Prefix SumAimee ReynoldsNo ratings yet
- UNIT-8 Forms of Parallelism: 8.1 Simple Parallel Computation: Example 1: Numerical Integration Over Two VariablesDocument12 pagesUNIT-8 Forms of Parallelism: 8.1 Simple Parallel Computation: Example 1: Numerical Integration Over Two VariablesArshad ShaikNo ratings yet
- Open Problems Around Exact Algorithms: Gerhard J. WoegingerDocument9 pagesOpen Problems Around Exact Algorithms: Gerhard J. WoegingerHesham HefnyNo ratings yet
- Lab 10-Descrete Fourier Transform and Circular ConvolutionDocument8 pagesLab 10-Descrete Fourier Transform and Circular ConvolutionAleena QureshiNo ratings yet
- Part 6: Random Number GenerationDocument42 pagesPart 6: Random Number GenerationLeiidy AceroNo ratings yet
- Fem Nptel Module 1Document29 pagesFem Nptel Module 1Syed Ahmed KabeerNo ratings yet
- Unit 1Document16 pagesUnit 1Jhone samNo ratings yet
- Computer GraphisDocument7 pagesComputer GraphisAlbin Ps PlappallilNo ratings yet
- Assignment 2Document3 pagesAssignment 2guanlin HeNo ratings yet
- 1 Parallel and Distributed ComputationDocument10 pages1 Parallel and Distributed ComputationEzio AuditoreNo ratings yet
- Monte Carlo TechniquesDocument9 pagesMonte Carlo TechniquesCecovam Mamut MateNo ratings yet
- Min ImageDocument9 pagesMin ImageRam Charan KonidelaNo ratings yet
- Problem Discretization Approximation Theory RevisedDocument76 pagesProblem Discretization Approximation Theory RevisedNishanth Murthy KottapalliNo ratings yet
- Purpose of Database - Overall System Structure - Entity Relationship Model - Mapping Constraints - Keys - ER DiagramDocument11 pagesPurpose of Database - Overall System Structure - Entity Relationship Model - Mapping Constraints - Keys - ER DiagramchitrashanNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Line Drawing Algorithm: Mastering Techniques for Precision Image RenderingFrom EverandLine Drawing Algorithm: Mastering Techniques for Precision Image RenderingNo ratings yet
- Advanced Support Assistance 069221Document2 pagesAdvanced Support Assistance 069221sunbeamNo ratings yet
- Using Pelles CDocument1 pageUsing Pelles CsunbeamNo ratings yet
- SC 2 CHTDocument39 pagesSC 2 CHTsunbeamNo ratings yet
- Workshop 2006Document51 pagesWorkshop 2006sunbeamNo ratings yet
- Waside SseDocument20 pagesWaside SsesunbeamNo ratings yet
- 312 50v11Document4 pages312 50v11sunbeamNo ratings yet
- 07 SimdDocument38 pages07 SimdsunbeamNo ratings yet
- Google Search Quality Rater Guidelines/sbs Phone BrowserDocument30 pagesGoogle Search Quality Rater Guidelines/sbs Phone Browsertiemmanuel38No ratings yet
- Jump and Sentinel SearchDocument3 pagesJump and Sentinel SearchxivalanoNo ratings yet
- Evolution of Graphics API: Sujal Bista CMSC 828VDocument26 pagesEvolution of Graphics API: Sujal Bista CMSC 828VJohn IveNo ratings yet
- Birla Institute of Technology & Science, Pilani Hyderabad Campus Second Semester 2018-2019 Course Handout (Part-II) 07-01-2019Document3 pagesBirla Institute of Technology & Science, Pilani Hyderabad Campus Second Semester 2018-2019 Course Handout (Part-II) 07-01-2019PriNo ratings yet
- What Is An SSD - Solid-State Drive Definition - AvastDocument10 pagesWhat Is An SSD - Solid-State Drive Definition - AvastThomasNo ratings yet
- Epic V Google Unredacted ComplaintDocument85 pagesEpic V Google Unredacted ComplaintGMG EditorialNo ratings yet
- MEAN STACK TECHNOLOGIES Lab ManualDocument102 pagesMEAN STACK TECHNOLOGIES Lab Manuallokeshvarma0309No ratings yet
- TD697G User ManualDocument29 pagesTD697G User ManualChris AntoniouNo ratings yet
- Data Centers in NepalDocument6 pagesData Centers in Nepalabhijeet2058No ratings yet
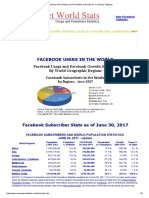
- Facebook World Stats and Penetration in The World - Facebook Statistics 2017Document5 pagesFacebook World Stats and Penetration in The World - Facebook Statistics 2017Pedro AguiarNo ratings yet
- IMS-DB Case StudyDocument20 pagesIMS-DB Case StudyAnupam SrivastavaNo ratings yet
- Angular Interview Questions - GitHubDocument45 pagesAngular Interview Questions - GitHubAvinash DubeyNo ratings yet
- B.B Maintenance Book MP 27.12.2011Document68 pagesB.B Maintenance Book MP 27.12.2011Aravind Maurya100% (3)
- Data Analytics & Data Science Job Ready ProgramDocument4 pagesData Analytics & Data Science Job Ready Programmaruf_tanmimNo ratings yet
- HafsaDocument16 pagesHafsaRubab MalikNo ratings yet
- Q-YC-MGK-2022 - 041 - Target Sourcing Services - Poly X50Document1 pageQ-YC-MGK-2022 - 041 - Target Sourcing Services - Poly X50MuhammadIrfanBaehaqiNo ratings yet
- Flatiron SoftwareEngineeringImmersive SyllabusDocument11 pagesFlatiron SoftwareEngineeringImmersive SyllabusNitro NexusNo ratings yet
- Introduction Cloud ComputingDocument17 pagesIntroduction Cloud ComputingJamel PandiinNo ratings yet
- HP Laptop Data SheetDocument3 pagesHP Laptop Data SheetSyed Abbu HurerahNo ratings yet
- Topic Wise Computer MCQsDocument53 pagesTopic Wise Computer MCQsRaghavNo ratings yet
- ADBMS Chapter 4Document13 pagesADBMS Chapter 4Misge fufaNo ratings yet
- PT2313L PDFDocument3 pagesPT2313L PDFMaugrys Castillo100% (1)
- Adjunto - Cano Ruiz - Carlos AlbertoDocument2 pagesAdjunto - Cano Ruiz - Carlos AlbertoJ Alfredo RgNo ratings yet
- WEEK 8 Introduction To Bootstrap 1577604054Document90 pagesWEEK 8 Introduction To Bootstrap 1577604054Oliver Fernandez OlivaresNo ratings yet
- Voyager XP 1470g PDFDocument2 pagesVoyager XP 1470g PDFCOVID COVIDNo ratings yet
- How The Concept Was Born: MarketoDocument8 pagesHow The Concept Was Born: Marketokapil kashyapNo ratings yet
- Final Test Gasal 2022 Si BDocument2 pagesFinal Test Gasal 2022 Si Blaeli arizaNo ratings yet