Download as docx, pdf, or txt
You might also like
- Welcome To Physics 241!: Electric Field CalculationsDocument13 pagesWelcome To Physics 241!: Electric Field CalculationsMuhammad Shoxab HussainNo ratings yet
- CH 10Document30 pagesCH 10Narendran KumaravelNo ratings yet
- Final Practice ProblemsDocument43 pagesFinal Practice Problemsichsan benhardNo ratings yet
- Drilling EquipmentDocument86 pagesDrilling EquipmentIqbal AfriansyahNo ratings yet
- Electromagnetic Fields Theory (Bee3113) : Magneto-Static FieldDocument26 pagesElectromagnetic Fields Theory (Bee3113) : Magneto-Static FieldAzuan Abdul RazakNo ratings yet
- FEE352Typed Equations2022Document35 pagesFEE352Typed Equations2022Terrero roNo ratings yet
- Unimap EmtDocument43 pagesUnimap EmtputputyeahNo ratings yet
- Static Magnetic FieldsDocument28 pagesStatic Magnetic Fieldsআল আবদুল্লাহ্ হাসানNo ratings yet
- Chapter 4Document39 pagesChapter 4Sameal LabibNo ratings yet
- EEE23 Lecture 07 - Magnetostatics I PDFDocument31 pagesEEE23 Lecture 07 - Magnetostatics I PDFJose Paolo AgustinNo ratings yet
- Elecmagctomagnetics II - Lecture 1Document19 pagesElecmagctomagnetics II - Lecture 1morris murimiNo ratings yet
- Ch2-Infinitesimal DipoleDocument17 pagesCh2-Infinitesimal DipolePooja SahneyNo ratings yet
- EMI Chapter7 PDFDocument50 pagesEMI Chapter7 PDFGADIGE SWATHI100% (1)
- WavesDocument30 pagesWavesAli IbrahimNo ratings yet
- Exam 100318Document2 pagesExam 100318Godo HamedNo ratings yet
- 8493506Document117 pages8493506Nessha PavithranNo ratings yet
- L14 MagnetostaticsDocument11 pagesL14 MagnetostaticsDisha GoelNo ratings yet
- Biot-Savart (Compatibility Mode)Document29 pagesBiot-Savart (Compatibility Mode)P Praveen KumarNo ratings yet
- Soft Blue KuduDocument10 pagesSoft Blue KuduAditya PrakashNo ratings yet
- 06 MagnetostaticsDocument37 pages06 MagnetostaticsccsingNo ratings yet
- MagnetostaticsDocument33 pagesMagnetostaticsamiteetumtech2013No ratings yet
- AWP Unit IIDocument65 pagesAWP Unit IIAmon AlexNo ratings yet
- Lecture 3Document42 pagesLecture 3Rithik JainNo ratings yet
- Magnetostatic Field (Steady Magnetic)Document44 pagesMagnetostatic Field (Steady Magnetic)ridwanto12No ratings yet
- Electromagnetism: Example Sheet 1Document3 pagesElectromagnetism: Example Sheet 1Fulgen VillegasNo ratings yet
- DL DL: Duality in Maxwell's Equations. Radiation From An Infinitesimal Loop. Radiation Zones.)Document16 pagesDL DL: Duality in Maxwell's Equations. Radiation From An Infinitesimal Loop. Radiation Zones.)DanielAeiounAeioumNo ratings yet
- Chapter3 Final EMTDocument33 pagesChapter3 Final EMTJohn wickNo ratings yet
- Applied AerodynamicsDocument23 pagesApplied AerodynamicsAfiorNo ratings yet
- Poisson's Equation in Electrostatics: Jinn-Liang LiuDocument7 pagesPoisson's Equation in Electrostatics: Jinn-Liang Liuaslam janNo ratings yet
- HW 2 Phys IIDocument1 pageHW 2 Phys IIm rNo ratings yet
- Problem Set 5: University of Alabama Department of Physics and Astronomy PH 126 Leclair Fall 2011Document11 pagesProblem Set 5: University of Alabama Department of Physics and Astronomy PH 126 Leclair Fall 2011AngelicaDominguezNo ratings yet
- Water Hammer With Fluid-Structure Interaction in Thick-Walled PipesDocument20 pagesWater Hammer With Fluid-Structure Interaction in Thick-Walled Pipeslibra mingNo ratings yet
- Magnetostatics: V R V Igdt DT RDocument5 pagesMagnetostatics: V R V Igdt DT RJoel DsouzaNo ratings yet
- Performance Simulation in High Altitude Platforms (Haps) Communications SystemsDocument9 pagesPerformance Simulation in High Altitude Platforms (Haps) Communications SystemsdheerajnehruNo ratings yet
- 141 10.1 Lecture Notes Polar CordinatesDocument4 pages141 10.1 Lecture Notes Polar CordinatesHaroon ShahNo ratings yet
- Ampere's Circuit LawDocument43 pagesAmpere's Circuit Lawarjun aNo ratings yet
- Design of EM DevicesDocument162 pagesDesign of EM Deviceswickedness100% (1)
- Progress in Electromagnetics Research B, Vol. 38, 281-296, 2012Document16 pagesProgress in Electromagnetics Research B, Vol. 38, 281-296, 2012African LOVENo ratings yet
- Physrevd 8 1044Document4 pagesPhysrevd 8 1044mmigthemightNo ratings yet
- Quantum Physics I (8.04) Spring 2016 Assignment 4: AnnouncementsDocument5 pagesQuantum Physics I (8.04) Spring 2016 Assignment 4: AnnouncementsFabian M Vargas FontalvoNo ratings yet
- Solution Manual: Static Magnetic FieldsDocument5 pagesSolution Manual: Static Magnetic FieldsSeanNo ratings yet
- EMW Mod3@AzDOCUMENTS - inDocument75 pagesEMW Mod3@AzDOCUMENTS - inMuhammed Asim ANo ratings yet
- Uebung07 enDocument3 pagesUebung07 enSanziana SteleaNo ratings yet
- Chapter Antennas CharacteristicsDocument63 pagesChapter Antennas Characteristicsnesrine nesnesNo ratings yet
- CH4Document30 pagesCH4iB13eNo ratings yet
- Sources of Magnetic FieldsDocument13 pagesSources of Magnetic FieldsAbdalla FarisNo ratings yet
- Wire Elements: Dipoles, Monopoles, Loops, HelicalDocument20 pagesWire Elements: Dipoles, Monopoles, Loops, HelicalPrisha SinghaniaNo ratings yet
- Equivalent Circuit of The Loop Antenna. The Small Loop As A Receiving Antenna. Ferrite Loops.)Document20 pagesEquivalent Circuit of The Loop Antenna. The Small Loop As A Receiving Antenna. Ferrite Loops.)Kamaraj PandianNo ratings yet
- Semiclassical Approximation: 3.1 The Classical LimitDocument22 pagesSemiclassical Approximation: 3.1 The Classical LimitRohan MittalNo ratings yet
- Moving Charges and Magnetism PDFDocument51 pagesMoving Charges and Magnetism PDFNishant RajNo ratings yet
- 4-Magnetic Effect 2021Document27 pages4-Magnetic Effect 2021Shamit MNo ratings yet
- PHYV102 - Chapter 30Document98 pagesPHYV102 - Chapter 30Lihle LuhadiNo ratings yet
- Lectures 20 and 21: Quantum Mechanics in 3D and Central PotentialsDocument13 pagesLectures 20 and 21: Quantum Mechanics in 3D and Central PotentialsJefersonNo ratings yet
- A New Electric Field Interpretation of Barycentric and Trilinear CoordinatesDocument4 pagesA New Electric Field Interpretation of Barycentric and Trilinear Coordinates真理一方通行No ratings yet
- Eρ r r r r r: r = F ρ r + ρ r V r dDocument5 pagesEρ r r r r r: r = F ρ r + ρ r V r dFahd ElmourabitNo ratings yet
- 6.013 Content:: Fundamentals and ApplicationsDocument9 pages6.013 Content:: Fundamentals and ApplicationsVinay SankhatNo ratings yet
- Lecture Notes Unit - IIDocument10 pagesLecture Notes Unit - IItagoreboopathy100% (1)
- Computational and Experimental Study of PDFDocument5 pagesComputational and Experimental Study of PDFBill M. SpragueNo ratings yet
- Fluid DerivationsDocument22 pagesFluid Derivations21M248 - SIBI SELVAN CNo ratings yet
- Ehrenfest Theorem, Galilean Invariance and Nonlinear SCHR Odinger EquationsDocument12 pagesEhrenfest Theorem, Galilean Invariance and Nonlinear SCHR Odinger EquationsSamir Kanti RoyNo ratings yet
- Comm... System CH2-Lec1Document36 pagesComm... System CH2-Lec1Aklilu AyeleNo ratings yet
- Chapter 4 IP AddressingDocument46 pagesChapter 4 IP AddressingAklilu AyeleNo ratings yet
- Chapter Two - 1Document64 pagesChapter Two - 1Aklilu AyeleNo ratings yet
- Chapter Five EditedDocument26 pagesChapter Five EditedAklilu AyeleNo ratings yet
- 2.5 Block Diagram AlgebraDocument28 pages2.5 Block Diagram AlgebraAklilu AyeleNo ratings yet
- Vector NoteDocument36 pagesVector NoteAklilu AyeleNo ratings yet
- Chapter One by BKDocument43 pagesChapter One by BKAklilu AyeleNo ratings yet
- 02-Random VariablesDocument62 pages02-Random VariablesAklilu AyeleNo ratings yet
- EMF Course SummaryDocument14 pagesEMF Course SummaryAklilu AyeleNo ratings yet
- Project Black BookDocument82 pagesProject Black Bookariseelectricals18No ratings yet
- Parameters Calculation of 5 HP AC Induction Motor PDFDocument5 pagesParameters Calculation of 5 HP AC Induction Motor PDFIjabiNo ratings yet
- Principles of Direct Current MachinesDocument434 pagesPrinciples of Direct Current MachinesHugo Queiroz100% (2)
- What Is Inductor and Inductance - Theory of Inductor - Electrical4uDocument12 pagesWhat Is Inductor and Inductance - Theory of Inductor - Electrical4uteju2812No ratings yet
- EEE EES MANUAL ChangedDocument36 pagesEEE EES MANUAL ChangedShaikh SohailNo ratings yet
- Electrical Machines PDFDocument54 pagesElectrical Machines PDFMallikarjunBhirade100% (1)
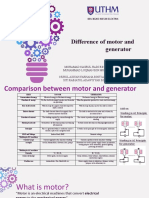
- Difference Between Motor and GeneratorDocument11 pagesDifference Between Motor and GeneratorMohamad Nasrul Hadi Bin Mohd AyopNo ratings yet
- What Is A TransformerDocument9 pagesWhat Is A TransformerAjitNo ratings yet
- The InductorDocument25 pagesThe InductorSureshraja9977No ratings yet
- What Is Transformer?: Table of ContentDocument9 pagesWhat Is Transformer?: Table of ContentShreedaNo ratings yet
- 13-Cold Fusion and Gravitational EnergyDocument28 pages13-Cold Fusion and Gravitational EnergyMohammed Al-OdatNo ratings yet
- Pp-Xii 2024 Physics 2023-24Document6 pagesPp-Xii 2024 Physics 2023-24haziqjavNo ratings yet
- PP For CH 30Document40 pagesPP For CH 30allah rakha swabiNo ratings yet
- Slip of An Induction MotorDocument19 pagesSlip of An Induction MotorJackson SichingaNo ratings yet
- Phy 102Document67 pagesPhy 102Nabil-babayo WANKANo ratings yet
- Cutler-Hammer: Learning Module 2: Fundamentals of ElectricityDocument39 pagesCutler-Hammer: Learning Module 2: Fundamentals of ElectricitySatish MalviyaNo ratings yet
- Over and Under Voltage Protection RelayDocument44 pagesOver and Under Voltage Protection RelaySeven Hills100% (3)
- Magnetic Effect of Electric Current Class 10 Science Extra Questions With AnswersDocument9 pagesMagnetic Effect of Electric Current Class 10 Science Extra Questions With AnswersGurinder SinghNo ratings yet
- T2W9C Maxwell - S EquationDocument7 pagesT2W9C Maxwell - S EquationNoof YousefNo ratings yet
- 6604 Issue 2 Testing of Insulating JointsDocument5 pages6604 Issue 2 Testing of Insulating Jointssaminasritn100% (1)
- Principle of Electromagnetic SurveyDocument2 pagesPrinciple of Electromagnetic Surveyfrancisco bonaNo ratings yet
- Physics Investigatory Project PDFDocument20 pagesPhysics Investigatory Project PDFJoker 1NNo ratings yet
- SLK G9-Q4wk8 Mongcopa (Refined)Document13 pagesSLK G9-Q4wk8 Mongcopa (Refined)Jeson GaiteraNo ratings yet
- Ee Obj 3Document35 pagesEe Obj 3Shaira Sto TomasNo ratings yet
- 30 Electrical Engineering Interview Questions and Answers - Freshers, ExperiencedDocument1 page30 Electrical Engineering Interview Questions and Answers - Freshers, ExperiencedVaishali Bansal100% (2)
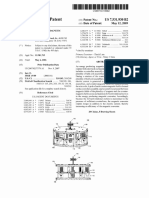
- Us 7531930 PatentDocument11 pagesUs 7531930 Patentsebastian.gonczarekNo ratings yet
- The Thorny Way of Truth Part3 MaririchDocument340 pagesThe Thorny Way of Truth Part3 MaririchEvaldas StankeviciusNo ratings yet
- EXP 1-9 FinalDocument28 pagesEXP 1-9 FinalMonika KanojiaNo ratings yet
- MagnetisumDocument20 pagesMagnetisumPpppNo ratings yet