Download as pdf or txt
You might also like
- Slow Down - 50 Mindful Moments in Nature - Rachel WilliamsDocument128 pagesSlow Down - 50 Mindful Moments in Nature - Rachel Williamsmuhamad fajriyan100% (3)
- 2016 Design of ExperimentsDocument74 pages2016 Design of Experimentsdogunmokun9100% (1)
- CAPE Chemistry Unit 2Document27 pagesCAPE Chemistry Unit 2Audi SweetangelNo ratings yet
- ALE Terex-AC100 Brochure1Document7 pagesALE Terex-AC100 Brochure1LasNo ratings yet
- Bok Seng Logistics Pte LTD: Chains Working Load Limits 6.00 TDocument1 pageBok Seng Logistics Pte LTD: Chains Working Load Limits 6.00 TRiyan EsapermanaNo ratings yet
- Management Petroleum ActivitiesDocument68 pagesManagement Petroleum Activitiesusman nawazNo ratings yet
- Petroleum ResourcesDocument61 pagesPetroleum Resourcesusman nawazNo ratings yet
- Sequence: Jn1364 - STP Cylinder & Top Section Kakinada Fpso ProjectDocument10 pagesSequence: Jn1364 - STP Cylinder & Top Section Kakinada Fpso ProjectRiyan EsapermanaNo ratings yet
- General Information: Ampe (Lumut) Operations Weekly ReportDocument3 pagesGeneral Information: Ampe (Lumut) Operations Weekly ReportBoyNo ratings yet
- Bok Seng Logistics Pte LTD: Chains Working Load Limits 6.00 TDocument1 pageBok Seng Logistics Pte LTD: Chains Working Load Limits 6.00 TRiyan EsapermanaNo ratings yet
- 6785 PDFDocument5 pages6785 PDFSandip SurNo ratings yet
- Abb Rev AtionsDocument7 pagesAbb Rev AtionsPonniyin SelvanNo ratings yet
- Sling and Tailing+Bundle PDFDocument9 pagesSling and Tailing+Bundle PDFHaGun GantryNo ratings yet
- Daily Report 25 Feb - ActivityDocument2 pagesDaily Report 25 Feb - ActivityBiyanNo ratings yet
- Bmst5103-Hesan Raj Part 3Document34 pagesBmst5103-Hesan Raj Part 3HesanRajaraniNo ratings yet
- Report AydinDocument85 pagesReport Aydinmyusuf_engineerNo ratings yet
- 3.1appendix Ballast REV.0Document87 pages3.1appendix Ballast REV.0Tran Van DaiNo ratings yet
- Goldhofer FTV 850 BrochureDocument2 pagesGoldhofer FTV 850 BrochureMauroNo ratings yet
- The Modelling of Suction Caisson Foun-Dations For Multi-Footed StructuresDocument172 pagesThe Modelling of Suction Caisson Foun-Dations For Multi-Footed StructuresNguyen Thanh Duc BKNo ratings yet
- End of Internship PresentationDocument23 pagesEnd of Internship Presentationa AoiNo ratings yet
- OFF - 12 Adriatic LNGDocument2 pagesOFF - 12 Adriatic LNGtpushkar9208No ratings yet
- IMCA-Event-2018-09-27 - Presentation 7 - Understanding Your Limits (Subsea7) PDFDocument21 pagesIMCA-Event-2018-09-27 - Presentation 7 - Understanding Your Limits (Subsea7) PDFsatrio aryoNo ratings yet
- Outline: Navigation Engineering: Understanding The BasicsDocument25 pagesOutline: Navigation Engineering: Understanding The BasicsIan WarnerNo ratings yet
- SHEQ Policy Statement 1Document2 pagesSHEQ Policy Statement 1yuqwaszxNo ratings yet
- Camelot Brochure Supply Base PDFDocument11 pagesCamelot Brochure Supply Base PDFDimi Jeri TriNo ratings yet
- 050200003-Best Practices - Design - Second Order CalculationsDocument11 pages050200003-Best Practices - Design - Second Order Calculationsdheeraj SureshNo ratings yet
- PDF Articles 1 10Document35 pagesPDF Articles 1 10Ahmed TrabelsiNo ratings yet
- 15112739-E-C01 - 00 (Relocation of 1255t STS Crane)Document14 pages15112739-E-C01 - 00 (Relocation of 1255t STS Crane)dheeraj SureshNo ratings yet
- Rl04500-D-eqd-0001-00 SPMT Power Pack Unit z350 Da-Rl4500Document1 pageRl04500-D-eqd-0001-00 SPMT Power Pack Unit z350 Da-Rl4500Muhammad Reza PutraNo ratings yet
- Crawler Crane SpesificationDocument7 pagesCrawler Crane SpesificationAdvent ManurungNo ratings yet
- Fagioli Technical Data Skid and Elevator SystemDocument5 pagesFagioli Technical Data Skid and Elevator SystemBoris BatalovNo ratings yet
- Barges - Ocean Going Workhorse PDFDocument12 pagesBarges - Ocean Going Workhorse PDFKelvin Xu100% (1)
- Rigging TrainingDocument124 pagesRigging TrainingaamirdesireNo ratings yet
- Lift & Lock System: Lift-n-Lock System, Extending The Manual Boom, 1 Stage and 2 Stage BoomsDocument5 pagesLift & Lock System: Lift-n-Lock System, Extending The Manual Boom, 1 Stage and 2 Stage BoomsFakhar Aziz KhanNo ratings yet
- Best Practices - Design - Wind LoadsDocument10 pagesBest Practices - Design - Wind Loadsdheeraj SureshNo ratings yet
- Heavy Lift ProceduresDocument9 pagesHeavy Lift ProceduresKatie PearceNo ratings yet
- Paving The Way For Project Efficiency: Mammoet Enviro-MatDocument7 pagesPaving The Way For Project Efficiency: Mammoet Enviro-MatvirasamirNo ratings yet
- SDPO 016 009 MDocument123 pagesSDPO 016 009 MAbanoub ShakerNo ratings yet
- DRP001-PUC-TRL-O94-000-4033 Rev.5Document33 pagesDRP001-PUC-TRL-O94-000-4033 Rev.5praba prabaNo ratings yet
- Transprotion Multi Axle Qxidation TowerDocument1 pageTransprotion Multi Axle Qxidation TowerMuhammad Reza PutraNo ratings yet
- VA1-L691-00100-M-M8-DTE-0008 Drum Erection Method PDFDocument112 pagesVA1-L691-00100-M-M8-DTE-0008 Drum Erection Method PDFTung NguyenNo ratings yet
- Operations Report of Balnaves Project - MobilizationDocument15 pagesOperations Report of Balnaves Project - MobilizationBoyNo ratings yet
- Offshore Structures Slides IIDocument23 pagesOffshore Structures Slides II66apenlullenNo ratings yet
- Initial Mv. Apiradee NareeDocument26 pagesInitial Mv. Apiradee NareeWinston RodriguesNo ratings yet
- Suppliers Front Sheet: (For A4/A3 Documents Only)Document2 pagesSuppliers Front Sheet: (For A4/A3 Documents Only)BoyNo ratings yet
- Flyer Transport LowresDocument2 pagesFlyer Transport LowresTh NattapongNo ratings yet
- BARGE KARIM (GRID 27 - PILE 31) v1Document18 pagesBARGE KARIM (GRID 27 - PILE 31) v1richardykeNo ratings yet
- Bas Joustra - Master Thesis ReportDocument199 pagesBas Joustra - Master Thesis ReportSean ChoiNo ratings yet
- QGX and QCSDocument41 pagesQGX and QCSRaed Naim KhammashNo ratings yet
- Tension Leg and Deep Draft PlatformsDocument72 pagesTension Leg and Deep Draft Platformsusman nawaz100% (1)
- HL707 Aidcg CR 002 R0Document89 pagesHL707 Aidcg CR 002 R0dheeraj SureshNo ratings yet
- CMM86503 - V1 Turret Chain Stopper Calculation PDFDocument24 pagesCMM86503 - V1 Turret Chain Stopper Calculation PDFTran LinhNo ratings yet
- Loadout AnalysisDocument23 pagesLoadout AnalysisChinnaraja GandhiNo ratings yet
- 11 - HMC 5dec Norwegian Society of Lifting TechnologyDocument50 pages11 - HMC 5dec Norwegian Society of Lifting TechnologyarchitectintxNo ratings yet
- Ale Hydrodeck Bro High ResDocument5 pagesAle Hydrodeck Bro High Resfarhan_82No ratings yet
- Introduction and PlanDocument54 pagesIntroduction and Planusman nawazNo ratings yet
- DRP001-PUC-TRL-O94-000-4007 Rev.3Document28 pagesDRP001-PUC-TRL-O94-000-4007 Rev.3praba prabaNo ratings yet
- Beam CheckDocument16 pagesBeam Checkdheeraj SureshNo ratings yet
- DRP001 Puc TRL O94 000 4035Document19 pagesDRP001 Puc TRL O94 000 4035praba prabaNo ratings yet
- SARENS Company OverviewDocument17 pagesSARENS Company OverviewCharles MouraniNo ratings yet
- DP Current - What Is ItDocument11 pagesDP Current - What Is ItPJGNo ratings yet
- WCS - Lecture 5 and 6Document90 pagesWCS - Lecture 5 and 6Md. Muhaiminul IslamNo ratings yet
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsFrom EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo ratings yet
- Tension Leg and Deep Draft PlatformsDocument72 pagesTension Leg and Deep Draft Platformsusman nawaz100% (1)
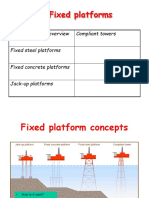
- Fixed PlatformsDocument98 pagesFixed Platformsusman nawazNo ratings yet
- Construction and WeightDocument79 pagesConstruction and Weightusman nawazNo ratings yet
- Platform Design IssuesDocument56 pagesPlatform Design Issuesusman nawazNo ratings yet
- Exploration and ReservoirDocument67 pagesExploration and Reservoirusman nawaz100% (1)
- Petroleum ResourcesDocument61 pagesPetroleum Resourcesusman nawazNo ratings yet
- Management Petroleum ActivitiesDocument68 pagesManagement Petroleum Activitiesusman nawazNo ratings yet
- Introduction and PlanDocument54 pagesIntroduction and Planusman nawazNo ratings yet
- 2 - Historic Overview - UploadDocument54 pages2 - Historic Overview - Uploadusman nawazNo ratings yet
- 2012 Cleaning MaintenanceDocument33 pages2012 Cleaning MaintenancewatnaNo ratings yet
- Preturi Daikin 2010Document36 pagesPreturi Daikin 2010GigieseNo ratings yet
- Termopar 9290030 ENG B WDocument2 pagesTermopar 9290030 ENG B WAndersonNo ratings yet
- Catalogo de Calderas y Equipos Cleaver Brooks 2011Document1,140 pagesCatalogo de Calderas y Equipos Cleaver Brooks 2011Lav HectorNo ratings yet
- 8 Unit6Document15 pages8 Unit6HEXAGON ProductionNo ratings yet
- Service Manual PUHZ P100 140VHADocument110 pagesService Manual PUHZ P100 140VHASoyyo JopetasNo ratings yet
- LG Cassette-Type Air Conditioner: Owner'S ManualDocument27 pagesLG Cassette-Type Air Conditioner: Owner'S ManualsigitowlNo ratings yet
- ADAM - The Art of Making MeadDocument5 pagesADAM - The Art of Making MeadrmedinaparedesNo ratings yet
- Home Assignment-8 - (Assignment Problems) (Chapter-9)Document3 pagesHome Assignment-8 - (Assignment Problems) (Chapter-9)Rounak MajumdarNo ratings yet
- ENGLISH V 4th RatingDocument43 pagesENGLISH V 4th RatingMichael Joseph SantosNo ratings yet
- Evolution: User ManualDocument7 pagesEvolution: User ManualHamza AliNo ratings yet
- Reading ComprehensionDocument3 pagesReading ComprehensionLivia UntaruNo ratings yet
- CAP - Safaa Sweaters LTD (Saafa Sewing LTD)Document15 pagesCAP - Safaa Sweaters LTD (Saafa Sewing LTD)अभि ना. कुंभारNo ratings yet
- BPC Risk AssesmentDocument2 pagesBPC Risk Assesmentapi-646109915No ratings yet
- Manual 162 PDFDocument47 pagesManual 162 PDFDeimer Jose Figueroa ManriqueNo ratings yet
- Future Simple Tense - AffirmativeDocument5 pagesFuture Simple Tense - AffirmativeMarco Anthony Del Aguila MoreyNo ratings yet
- 06 - Design Constuction and Operation of A Large Centerline TSFDocument14 pages06 - Design Constuction and Operation of A Large Centerline TSFChana Palomino100% (1)
- Exploring Feasibility of Passive Cooling Techniques in Residential Buildings in KeralaDocument7 pagesExploring Feasibility of Passive Cooling Techniques in Residential Buildings in KeralaEsther AbraahamNo ratings yet
- Horticultural CropsDocument106 pagesHorticultural CropsvvvpnscNo ratings yet
- Breaker Operator's and Services ManualDocument96 pagesBreaker Operator's and Services Manuallinuskotte100% (1)
- Sailing Summer 2013Document72 pagesSailing Summer 2013danut_docNo ratings yet
- D5298 Medición de La Succión Papel FiltroDocument6 pagesD5298 Medición de La Succión Papel FiltroJesus EspinosaNo ratings yet
- Martini V MacondrayDocument2 pagesMartini V MacondrayboomonyouNo ratings yet
- Haulotte Man LiftHA18PX UK BDDocument2 pagesHaulotte Man LiftHA18PX UK BDFeroz HameedNo ratings yet
- Embargoed: Embargoed Until April 24, 2019 at 12:01 A.M. (Eastern Time)Document167 pagesEmbargoed: Embargoed Until April 24, 2019 at 12:01 A.M. (Eastern Time)Las Vegas Review-JournalNo ratings yet
- Ducting Phenomena and Their Impact On A Pulse Doppler RadarDocument12 pagesDucting Phenomena and Their Impact On A Pulse Doppler Radarozgur100% (1)
- Elementary Student's Book: I Interviewer, J JanDocument2 pagesElementary Student's Book: I Interviewer, J Janmichael kasan100% (1)