
7K3RPT9C 89
7K3RPT9C 89
You might also like
- Maplin Electronics 1983-09Document68 pagesMaplin Electronics 1983-09Raphaël DurandNo ratings yet
- The Golden Turkey AwardsDocument5 pagesThe Golden Turkey AwardsMIDNITECAMPZ0% (2)
- Course CatalogDocument495 pagesCourse Catalogzbouzgha100% (2)
- Some Applications of Kleene AlgebraDocument7 pagesSome Applications of Kleene AlgebraUbiquitous Computing and Communication JournalNo ratings yet
- 14 Chebyshev PolynomialsDocument8 pages14 Chebyshev PolynomialsMarisnelvys CabrejaNo ratings yet
- Improved Conic Reformulations For K-Means Clustering: Madhushini Narayana Prasad and Grani A. HanasusantoDocument24 pagesImproved Conic Reformulations For K-Means Clustering: Madhushini Narayana Prasad and Grani A. HanasusantoNo12n533No ratings yet
- Lecture 14: BCH Codes: CS681 Computational Number TheoryDocument5 pagesLecture 14: BCH Codes: CS681 Computational Number TheoryChinmayee PaiNo ratings yet
- IJNAA - Volume 14 - Issue 1 - Pages 2007-2018Document12 pagesIJNAA - Volume 14 - Issue 1 - Pages 2007-2018amnakalsoombuttNo ratings yet
- Research Institute, University of Alabama, Huntsville, U.S.ADocument7 pagesResearch Institute, University of Alabama, Huntsville, U.S.AajayNo ratings yet
- Lecture 01Document10 pagesLecture 01currecurreNo ratings yet
- Introduction To Complexity Theory: 1 2 M I 1 N I I 1 N 1 NDocument3 pagesIntroduction To Complexity Theory: 1 2 M I 1 N I I 1 N 1 NAceNo ratings yet
- Extra Exercises PDFDocument232 pagesExtra Exercises PDFShy PeachDNo ratings yet
- Alt ProjDocument9 pagesAlt ProjShy PeachDNo ratings yet
- cs229 Notes7aDocument3 pagescs229 Notes7achrisNo ratings yet
- 1 s2.0 S0196885810000333 MainDocument12 pages1 s2.0 S0196885810000333 Mainajitrisno6No ratings yet
- Mit18 100af20 Lec1Document5 pagesMit18 100af20 Lec1Vineet NairNo ratings yet
- Class 12 MathsDocument484 pagesClass 12 MathsAnonymousNo ratings yet
- Lemh 1 A 1Document9 pagesLemh 1 A 1shubhanshu1493No ratings yet
- 7K3RPT9C 92Document1 page7K3RPT9C 92Matthieu BridiNo ratings yet
- The Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Document6 pagesThe Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Jorge OñateNo ratings yet
- Gaussian QuadratureDocument6 pagesGaussian QuadratureKaran K H MNo ratings yet
- Matrix Chain Multiplication - StudentsDocument3 pagesMatrix Chain Multiplication - Studentsrs479517No ratings yet
- 02 Convex Sets Notes Cvxopt f22Document29 pages02 Convex Sets Notes Cvxopt f22jchill2018No ratings yet
- Strong Convergence Theorem by A Hybrid Extragradient-Like Approximation Method For Variational Inequalities and Fixed Point ProblemsDocument15 pagesStrong Convergence Theorem by A Hybrid Extragradient-Like Approximation Method For Variational Inequalities and Fixed Point ProblemsAdnan MehmoodNo ratings yet
- 0.0.1. Complementary-Dual QC Codes Are Good: (x) (x) =F (x) / (x) =F (x) / (x) =F (ξ) =F =H (x) (x)Document4 pages0.0.1. Complementary-Dual QC Codes Are Good: (x) (x) =F (x) / (x) =F (x) / (x) =F (ξ) =F =H (x) (x)Ajay RodgeNo ratings yet
- Iterating Free-Field Ads/Cft: Higher Spin Partition Function RelationsDocument26 pagesIterating Free-Field Ads/Cft: Higher Spin Partition Function RelationsDaniel TorresNo ratings yet
- Computation of CohomologyDocument10 pagesComputation of CohomologyJhon Alexander Vasquez NaranjoNo ratings yet
- (Tamal K. De) Homology GroupDocument4 pages(Tamal K. De) Homology Groupfaudzi5505No ratings yet
- BV Cvxbook Extra ExercisesDocument237 pagesBV Cvxbook Extra ExercisesWilian GuamánNo ratings yet
- Kmeans Is Np-HardDocument15 pagesKmeans Is Np-Hardshraddha212No ratings yet
- JDT CSPDocument55 pagesJDT CSPAnonymous UrVkcdNo ratings yet
- Modular Spaces RevisedDocument13 pagesModular Spaces RevisedYiğit ErpakNo ratings yet
- Moti Gitik and Saharon Shelah - On Densities of Box ProductsDocument21 pagesMoti Gitik and Saharon Shelah - On Densities of Box ProductsKsmweoNo ratings yet
- RMM2018 Day2 EnglishDocument6 pagesRMM2018 Day2 EnglishGNo ratings yet
- BV Cvxbook Extra Exercises PDFDocument152 pagesBV Cvxbook Extra Exercises PDFSoumitra BhowmickNo ratings yet
- What NPCDocument5 pagesWhat NPCmaurice.gaucheNo ratings yet
- SoftDocument24 pagesSoftYash MehrotraNo ratings yet
- Meshless Cubature Over The Disk by Thin-Plate Splines ?: Alessandro Punzi, Alvise Sommariva, Marco VianelloDocument11 pagesMeshless Cubature Over The Disk by Thin-Plate Splines ?: Alessandro Punzi, Alvise Sommariva, Marco VianellodentifricioNo ratings yet
- Convex SetsDocument57 pagesConvex SetsSlim ShadyNo ratings yet
- 2405 03621v1Document8 pages2405 03621v1vishwamr90210No ratings yet
- Tut 7Document19 pagesTut 7SeanNo ratings yet
- PeterssonDocument12 pagesPeterssonujjwal20202021No ratings yet
- Lecture Math280Document60 pagesLecture Math280faisal AlduwayanNo ratings yet
- HandoutDocument6 pagesHandoutEpic WinNo ratings yet
- BV Cvxbook Extra ExercisesDocument117 pagesBV Cvxbook Extra ExercisesAsif AhmedNo ratings yet
- 1 s2.0 S0022314X15000396 Main PDFDocument13 pages1 s2.0 S0022314X15000396 Main PDFLAXMI MAJHINo ratings yet
- Lecture 6: Introduction To Simplicial HomologyDocument6 pagesLecture 6: Introduction To Simplicial HomologybeteduvalleNo ratings yet
- Pset7 SolDocument3 pagesPset7 Solkeungboy26No ratings yet
- MRRW Bound and Isoperimetric Problems: 6.1 PreliminariesDocument8 pagesMRRW Bound and Isoperimetric Problems: 6.1 PreliminariesAshoka VanjareNo ratings yet
- Attractor BoundaryDocument13 pagesAttractor BoundaryNicolas DemidovNo ratings yet
- Lect 16 FDocument3 pagesLect 16 Fወንድሙ ዘገዬNo ratings yet
- Math-UA.326.001: Analysis II Notes For The Inverse Function TheoremDocument14 pagesMath-UA.326.001: Analysis II Notes For The Inverse Function Theoremciroca96No ratings yet
- Richardson ExtrapolationDocument2 pagesRichardson ExtrapolationPanot ChaimongkolNo ratings yet
- A Functorial Version of Chevalley's Theorem On Constructible Sets 2406.09092Document18 pagesA Functorial Version of Chevalley's Theorem On Constructible Sets 2406.09092backpropogatedNo ratings yet
- On Expanding A Function Into Raw Moment SeriesDocument10 pagesOn Expanding A Function Into Raw Moment Seriesandrej_liptajNo ratings yet
- BVCvxbook Extra ExercisesDocument192 pagesBVCvxbook Extra ExercisesThe DudeNo ratings yet
- Notes On Gans, Energy-Based Models, and Saddle PointsDocument10 pagesNotes On Gans, Energy-Based Models, and Saddle PointsNguyễn ViệtNo ratings yet
- Notes On Gans, Energy-Based Models, and Saddle PointsDocument10 pagesNotes On Gans, Energy-Based Models, and Saddle PointsNguyễn ViệtNo ratings yet
- Split 4953397105947079701Document1 pageSplit 4953397105947079701rohitraj20261No ratings yet
- Additional Exercises For Convex Optimization PDFDocument187 pagesAdditional Exercises For Convex Optimization PDFCliffordTorresNo ratings yet
- Fixed-Point Iteration Based Algorithm For A ClassDocument13 pagesFixed-Point Iteration Based Algorithm For A ClassNick MantzakourasNo ratings yet
- 20 1Document124 pages20 1고영민No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- BWG7JK53 4Document1 pageBWG7JK53 4Matthieu BridiNo ratings yet
- Books 2-1Document1 pageBooks 2-1Matthieu BridiNo ratings yet
- BWG7JK53 6Document1 pageBWG7JK53 6Matthieu BridiNo ratings yet
- BWG7JK53 3Document1 pageBWG7JK53 3Matthieu BridiNo ratings yet
- BWG7JK53 5Document1 pageBWG7JK53 5Matthieu BridiNo ratings yet
- 7K3RPT9C 96Document1 page7K3RPT9C 96Matthieu BridiNo ratings yet
- BWG7JK53 2Document1 pageBWG7JK53 2Matthieu BridiNo ratings yet
- 7K3RPT9C 86Document1 page7K3RPT9C 86Matthieu BridiNo ratings yet
- 7K3RPT9C 95Document1 page7K3RPT9C 95Matthieu BridiNo ratings yet
- 7K3RPT9C 98Document1 page7K3RPT9C 98Matthieu BridiNo ratings yet
- 7K3RPT9C 94Document1 page7K3RPT9C 94Matthieu BridiNo ratings yet
- 7K3RPT9C 97Document1 page7K3RPT9C 97Matthieu BridiNo ratings yet
- 7K3RPT9C 91Document1 page7K3RPT9C 91Matthieu BridiNo ratings yet
- 7K3RPT9C 93Document1 page7K3RPT9C 93Matthieu BridiNo ratings yet
- 7K3RPT9C 90Document1 page7K3RPT9C 90Matthieu BridiNo ratings yet
- 7K3RPT9C 88Document1 page7K3RPT9C 88Matthieu BridiNo ratings yet
- 7K3RPT9C 92Document1 page7K3RPT9C 92Matthieu BridiNo ratings yet
- 7K3RPT9C 84Document1 page7K3RPT9C 84Matthieu BridiNo ratings yet
- 7K3RPT9C 83Document1 page7K3RPT9C 83Matthieu BridiNo ratings yet
- 7K3RPT9C 81Document1 page7K3RPT9C 81Matthieu BridiNo ratings yet
- 7K3RPT9C 85Document1 page7K3RPT9C 85Matthieu BridiNo ratings yet
- 7K3RPT9C 78Document1 page7K3RPT9C 78Matthieu BridiNo ratings yet
- 7K3RPT9C 79Document1 page7K3RPT9C 79Matthieu BridiNo ratings yet
- 7K3RPT9C 82Document1 page7K3RPT9C 82Matthieu BridiNo ratings yet
- 7K3RPT9C 80Document1 page7K3RPT9C 80Matthieu BridiNo ratings yet
- 7K3RPT9C 87Document1 page7K3RPT9C 87Matthieu BridiNo ratings yet
- 7K3RPT9C 76Document1 page7K3RPT9C 76Matthieu BridiNo ratings yet
- 7K3RPT9C 77Document1 page7K3RPT9C 77Matthieu BridiNo ratings yet
- 7K3RPT9C 75Document1 page7K3RPT9C 75Matthieu BridiNo ratings yet
- 7K3RPT9C 73Document1 page7K3RPT9C 73Matthieu BridiNo ratings yet
- PDF - of - Heat Pump Water Heater PresentationDocument43 pagesPDF - of - Heat Pump Water Heater PresentationBRYMOENNo ratings yet
- Heavyvinyl Issue1Document115 pagesHeavyvinyl Issue1Adam100% (2)
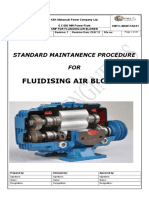
- SMP For Fluidizing Air BlowerDocument20 pagesSMP For Fluidizing Air BlowerSonrat100% (1)
- ComparativesDocument2 pagesComparativesWIWIK100% (1)
- Green Bedding Separator FAN - Parts List - 2017Document9 pagesGreen Bedding Separator FAN - Parts List - 2017Centrifugal SeparatorNo ratings yet
- Chico Resume 2015 For WebsiteDocument2 pagesChico Resume 2015 For Websiteapi-87866586No ratings yet
- Fault Detection in Solar Power Plants Using Predictiveanalytic TechniquesDocument7 pagesFault Detection in Solar Power Plants Using Predictiveanalytic TechniquesRodrigoNo ratings yet
- Competitive Rivalry and Competitive Dynamics: Strategic ManagementDocument42 pagesCompetitive Rivalry and Competitive Dynamics: Strategic ManagementnessieanatashaNo ratings yet
- 7 PDFDocument6 pages7 PDFjoseNo ratings yet
- HVAC and Refrigeration SystemDocument36 pagesHVAC and Refrigeration Systemranveer100% (1)
- Let's Get Scotland Walking - The National Walking Strategy - Escócia - 2019Document29 pagesLet's Get Scotland Walking - The National Walking Strategy - Escócia - 2019Natália CostaNo ratings yet
- AddressDocument7 pagesAddressKamal ElumalaiNo ratings yet
- Microbiological Assay of AntibioticsDocument12 pagesMicrobiological Assay of AntibioticsIsmailNo ratings yet
- PA - StocksDocument36 pagesPA - Stocksikolev57No ratings yet
- DLP IN ORAL COMMUNICATION-GRADE 11-EditedDocument6 pagesDLP IN ORAL COMMUNICATION-GRADE 11-EditedMaeann MirandoNo ratings yet
- TLETVL HECookery 9 11 Q3 Module 1Document26 pagesTLETVL HECookery 9 11 Q3 Module 1Ya SiNo ratings yet
- Bradburn Et Al v. North Central Regional Library District - Document No. 57Document28 pagesBradburn Et Al v. North Central Regional Library District - Document No. 57Justia.comNo ratings yet
- Non-Nutritive Sucking Habit Breakers Carlos Loza and Christina Rodriguez NutritionDocument6 pagesNon-Nutritive Sucking Habit Breakers Carlos Loza and Christina Rodriguez Nutritionapi-421866375No ratings yet
- Inctrykcija Po Zkcplyatacii YLCSDocument90 pagesInctrykcija Po Zkcplyatacii YLCSpredragstojicicNo ratings yet
- UTS ENGLISH - 112011192 - Netta Delyana PutriDocument2 pagesUTS ENGLISH - 112011192 - Netta Delyana Putrinetta delyana putriNo ratings yet
- Presentation On Heineken BeerDocument13 pagesPresentation On Heineken BeerΣόλα ΚαρίμοβαNo ratings yet
- Ethics Education Package Order FormDocument1 pageEthics Education Package Order Formlinm@kilvington.vic.edu.auNo ratings yet
- Micro paraDocument7 pagesMicro paraAj MillanNo ratings yet
- Bible Timeline Card GameDocument18 pagesBible Timeline Card GameTully EhlersNo ratings yet
- EG III Generator Unit ManualDocument15 pagesEG III Generator Unit ManualLIVIANo ratings yet
- Evaluating Spoken TextsDocument4 pagesEvaluating Spoken TextsErrold SerranoNo ratings yet
- Role of Commercial Banks in The Economic Development of IndiaDocument5 pagesRole of Commercial Banks in The Economic Development of IndiaGargstudy PointNo ratings yet





















































































































Download as pdf or txt
You might also like
- Maplin Electronics 1983-09Document68 pagesMaplin Electronics 1983-09Raphaël DurandNo ratings yet
- The Golden Turkey AwardsDocument5 pagesThe Golden Turkey AwardsMIDNITECAMPZ0% (2)
- Course CatalogDocument495 pagesCourse Catalogzbouzgha100% (2)
- Some Applications of Kleene AlgebraDocument7 pagesSome Applications of Kleene AlgebraUbiquitous Computing and Communication JournalNo ratings yet
- 14 Chebyshev PolynomialsDocument8 pages14 Chebyshev PolynomialsMarisnelvys CabrejaNo ratings yet
- Improved Conic Reformulations For K-Means Clustering: Madhushini Narayana Prasad and Grani A. HanasusantoDocument24 pagesImproved Conic Reformulations For K-Means Clustering: Madhushini Narayana Prasad and Grani A. HanasusantoNo12n533No ratings yet
- Lecture 14: BCH Codes: CS681 Computational Number TheoryDocument5 pagesLecture 14: BCH Codes: CS681 Computational Number TheoryChinmayee PaiNo ratings yet
- IJNAA - Volume 14 - Issue 1 - Pages 2007-2018Document12 pagesIJNAA - Volume 14 - Issue 1 - Pages 2007-2018amnakalsoombuttNo ratings yet
- Research Institute, University of Alabama, Huntsville, U.S.ADocument7 pagesResearch Institute, University of Alabama, Huntsville, U.S.AajayNo ratings yet
- Lecture 01Document10 pagesLecture 01currecurreNo ratings yet
- Introduction To Complexity Theory: 1 2 M I 1 N I I 1 N 1 NDocument3 pagesIntroduction To Complexity Theory: 1 2 M I 1 N I I 1 N 1 NAceNo ratings yet
- Extra Exercises PDFDocument232 pagesExtra Exercises PDFShy PeachDNo ratings yet
- Alt ProjDocument9 pagesAlt ProjShy PeachDNo ratings yet
- cs229 Notes7aDocument3 pagescs229 Notes7achrisNo ratings yet
- 1 s2.0 S0196885810000333 MainDocument12 pages1 s2.0 S0196885810000333 Mainajitrisno6No ratings yet
- Mit18 100af20 Lec1Document5 pagesMit18 100af20 Lec1Vineet NairNo ratings yet
- Class 12 MathsDocument484 pagesClass 12 MathsAnonymousNo ratings yet
- Lemh 1 A 1Document9 pagesLemh 1 A 1shubhanshu1493No ratings yet
- 7K3RPT9C 92Document1 page7K3RPT9C 92Matthieu BridiNo ratings yet
- The Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Document6 pagesThe Discrete Cosine Transform Over Prime Finite Fields: (Hmo, Marciam, Ricardo) @ufpe - BR, MMV@Jorge OñateNo ratings yet
- Gaussian QuadratureDocument6 pagesGaussian QuadratureKaran K H MNo ratings yet
- Matrix Chain Multiplication - StudentsDocument3 pagesMatrix Chain Multiplication - Studentsrs479517No ratings yet
- 02 Convex Sets Notes Cvxopt f22Document29 pages02 Convex Sets Notes Cvxopt f22jchill2018No ratings yet
- Strong Convergence Theorem by A Hybrid Extragradient-Like Approximation Method For Variational Inequalities and Fixed Point ProblemsDocument15 pagesStrong Convergence Theorem by A Hybrid Extragradient-Like Approximation Method For Variational Inequalities and Fixed Point ProblemsAdnan MehmoodNo ratings yet
- 0.0.1. Complementary-Dual QC Codes Are Good: (x) (x) =F (x) / (x) =F (x) / (x) =F (ξ) =F =H (x) (x)Document4 pages0.0.1. Complementary-Dual QC Codes Are Good: (x) (x) =F (x) / (x) =F (x) / (x) =F (ξ) =F =H (x) (x)Ajay RodgeNo ratings yet
- Iterating Free-Field Ads/Cft: Higher Spin Partition Function RelationsDocument26 pagesIterating Free-Field Ads/Cft: Higher Spin Partition Function RelationsDaniel TorresNo ratings yet
- Computation of CohomologyDocument10 pagesComputation of CohomologyJhon Alexander Vasquez NaranjoNo ratings yet
- (Tamal K. De) Homology GroupDocument4 pages(Tamal K. De) Homology Groupfaudzi5505No ratings yet
- BV Cvxbook Extra ExercisesDocument237 pagesBV Cvxbook Extra ExercisesWilian GuamánNo ratings yet
- Kmeans Is Np-HardDocument15 pagesKmeans Is Np-Hardshraddha212No ratings yet
- JDT CSPDocument55 pagesJDT CSPAnonymous UrVkcdNo ratings yet
- Modular Spaces RevisedDocument13 pagesModular Spaces RevisedYiğit ErpakNo ratings yet
- Moti Gitik and Saharon Shelah - On Densities of Box ProductsDocument21 pagesMoti Gitik and Saharon Shelah - On Densities of Box ProductsKsmweoNo ratings yet
- RMM2018 Day2 EnglishDocument6 pagesRMM2018 Day2 EnglishGNo ratings yet
- BV Cvxbook Extra Exercises PDFDocument152 pagesBV Cvxbook Extra Exercises PDFSoumitra BhowmickNo ratings yet
- What NPCDocument5 pagesWhat NPCmaurice.gaucheNo ratings yet
- SoftDocument24 pagesSoftYash MehrotraNo ratings yet
- Meshless Cubature Over The Disk by Thin-Plate Splines ?: Alessandro Punzi, Alvise Sommariva, Marco VianelloDocument11 pagesMeshless Cubature Over The Disk by Thin-Plate Splines ?: Alessandro Punzi, Alvise Sommariva, Marco VianellodentifricioNo ratings yet
- Convex SetsDocument57 pagesConvex SetsSlim ShadyNo ratings yet
- 2405 03621v1Document8 pages2405 03621v1vishwamr90210No ratings yet
- Tut 7Document19 pagesTut 7SeanNo ratings yet
- PeterssonDocument12 pagesPeterssonujjwal20202021No ratings yet
- Lecture Math280Document60 pagesLecture Math280faisal AlduwayanNo ratings yet
- HandoutDocument6 pagesHandoutEpic WinNo ratings yet
- BV Cvxbook Extra ExercisesDocument117 pagesBV Cvxbook Extra ExercisesAsif AhmedNo ratings yet
- 1 s2.0 S0022314X15000396 Main PDFDocument13 pages1 s2.0 S0022314X15000396 Main PDFLAXMI MAJHINo ratings yet
- Lecture 6: Introduction To Simplicial HomologyDocument6 pagesLecture 6: Introduction To Simplicial HomologybeteduvalleNo ratings yet
- Pset7 SolDocument3 pagesPset7 Solkeungboy26No ratings yet
- MRRW Bound and Isoperimetric Problems: 6.1 PreliminariesDocument8 pagesMRRW Bound and Isoperimetric Problems: 6.1 PreliminariesAshoka VanjareNo ratings yet
- Attractor BoundaryDocument13 pagesAttractor BoundaryNicolas DemidovNo ratings yet
- Lect 16 FDocument3 pagesLect 16 Fወንድሙ ዘገዬNo ratings yet
- Math-UA.326.001: Analysis II Notes For The Inverse Function TheoremDocument14 pagesMath-UA.326.001: Analysis II Notes For The Inverse Function Theoremciroca96No ratings yet
- Richardson ExtrapolationDocument2 pagesRichardson ExtrapolationPanot ChaimongkolNo ratings yet
- A Functorial Version of Chevalley's Theorem On Constructible Sets 2406.09092Document18 pagesA Functorial Version of Chevalley's Theorem On Constructible Sets 2406.09092backpropogatedNo ratings yet
- On Expanding A Function Into Raw Moment SeriesDocument10 pagesOn Expanding A Function Into Raw Moment Seriesandrej_liptajNo ratings yet
- BVCvxbook Extra ExercisesDocument192 pagesBVCvxbook Extra ExercisesThe DudeNo ratings yet
- Notes On Gans, Energy-Based Models, and Saddle PointsDocument10 pagesNotes On Gans, Energy-Based Models, and Saddle PointsNguyễn ViệtNo ratings yet
- Notes On Gans, Energy-Based Models, and Saddle PointsDocument10 pagesNotes On Gans, Energy-Based Models, and Saddle PointsNguyễn ViệtNo ratings yet
- Split 4953397105947079701Document1 pageSplit 4953397105947079701rohitraj20261No ratings yet
- Additional Exercises For Convex Optimization PDFDocument187 pagesAdditional Exercises For Convex Optimization PDFCliffordTorresNo ratings yet
- Fixed-Point Iteration Based Algorithm For A ClassDocument13 pagesFixed-Point Iteration Based Algorithm For A ClassNick MantzakourasNo ratings yet
- 20 1Document124 pages20 1고영민No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- BWG7JK53 4Document1 pageBWG7JK53 4Matthieu BridiNo ratings yet
- Books 2-1Document1 pageBooks 2-1Matthieu BridiNo ratings yet
- BWG7JK53 6Document1 pageBWG7JK53 6Matthieu BridiNo ratings yet
- BWG7JK53 3Document1 pageBWG7JK53 3Matthieu BridiNo ratings yet
- BWG7JK53 5Document1 pageBWG7JK53 5Matthieu BridiNo ratings yet
- 7K3RPT9C 96Document1 page7K3RPT9C 96Matthieu BridiNo ratings yet
- BWG7JK53 2Document1 pageBWG7JK53 2Matthieu BridiNo ratings yet
- 7K3RPT9C 86Document1 page7K3RPT9C 86Matthieu BridiNo ratings yet
- 7K3RPT9C 95Document1 page7K3RPT9C 95Matthieu BridiNo ratings yet
- 7K3RPT9C 98Document1 page7K3RPT9C 98Matthieu BridiNo ratings yet
- 7K3RPT9C 94Document1 page7K3RPT9C 94Matthieu BridiNo ratings yet
- 7K3RPT9C 97Document1 page7K3RPT9C 97Matthieu BridiNo ratings yet
- 7K3RPT9C 91Document1 page7K3RPT9C 91Matthieu BridiNo ratings yet
- 7K3RPT9C 93Document1 page7K3RPT9C 93Matthieu BridiNo ratings yet
- 7K3RPT9C 90Document1 page7K3RPT9C 90Matthieu BridiNo ratings yet
- 7K3RPT9C 88Document1 page7K3RPT9C 88Matthieu BridiNo ratings yet
- 7K3RPT9C 92Document1 page7K3RPT9C 92Matthieu BridiNo ratings yet
- 7K3RPT9C 84Document1 page7K3RPT9C 84Matthieu BridiNo ratings yet
- 7K3RPT9C 83Document1 page7K3RPT9C 83Matthieu BridiNo ratings yet
- 7K3RPT9C 81Document1 page7K3RPT9C 81Matthieu BridiNo ratings yet
- 7K3RPT9C 85Document1 page7K3RPT9C 85Matthieu BridiNo ratings yet
- 7K3RPT9C 78Document1 page7K3RPT9C 78Matthieu BridiNo ratings yet
- 7K3RPT9C 79Document1 page7K3RPT9C 79Matthieu BridiNo ratings yet
- 7K3RPT9C 82Document1 page7K3RPT9C 82Matthieu BridiNo ratings yet
- 7K3RPT9C 80Document1 page7K3RPT9C 80Matthieu BridiNo ratings yet
- 7K3RPT9C 87Document1 page7K3RPT9C 87Matthieu BridiNo ratings yet
- 7K3RPT9C 76Document1 page7K3RPT9C 76Matthieu BridiNo ratings yet
- 7K3RPT9C 77Document1 page7K3RPT9C 77Matthieu BridiNo ratings yet
- 7K3RPT9C 75Document1 page7K3RPT9C 75Matthieu BridiNo ratings yet
- 7K3RPT9C 73Document1 page7K3RPT9C 73Matthieu BridiNo ratings yet
- PDF - of - Heat Pump Water Heater PresentationDocument43 pagesPDF - of - Heat Pump Water Heater PresentationBRYMOENNo ratings yet
- Heavyvinyl Issue1Document115 pagesHeavyvinyl Issue1Adam100% (2)
- SMP For Fluidizing Air BlowerDocument20 pagesSMP For Fluidizing Air BlowerSonrat100% (1)
- ComparativesDocument2 pagesComparativesWIWIK100% (1)
- Green Bedding Separator FAN - Parts List - 2017Document9 pagesGreen Bedding Separator FAN - Parts List - 2017Centrifugal SeparatorNo ratings yet
- Chico Resume 2015 For WebsiteDocument2 pagesChico Resume 2015 For Websiteapi-87866586No ratings yet
- Fault Detection in Solar Power Plants Using Predictiveanalytic TechniquesDocument7 pagesFault Detection in Solar Power Plants Using Predictiveanalytic TechniquesRodrigoNo ratings yet
- Competitive Rivalry and Competitive Dynamics: Strategic ManagementDocument42 pagesCompetitive Rivalry and Competitive Dynamics: Strategic ManagementnessieanatashaNo ratings yet
- 7 PDFDocument6 pages7 PDFjoseNo ratings yet
- HVAC and Refrigeration SystemDocument36 pagesHVAC and Refrigeration Systemranveer100% (1)
- Let's Get Scotland Walking - The National Walking Strategy - Escócia - 2019Document29 pagesLet's Get Scotland Walking - The National Walking Strategy - Escócia - 2019Natália CostaNo ratings yet
- AddressDocument7 pagesAddressKamal ElumalaiNo ratings yet
- Microbiological Assay of AntibioticsDocument12 pagesMicrobiological Assay of AntibioticsIsmailNo ratings yet
- PA - StocksDocument36 pagesPA - Stocksikolev57No ratings yet
- DLP IN ORAL COMMUNICATION-GRADE 11-EditedDocument6 pagesDLP IN ORAL COMMUNICATION-GRADE 11-EditedMaeann MirandoNo ratings yet
- TLETVL HECookery 9 11 Q3 Module 1Document26 pagesTLETVL HECookery 9 11 Q3 Module 1Ya SiNo ratings yet
- Bradburn Et Al v. North Central Regional Library District - Document No. 57Document28 pagesBradburn Et Al v. North Central Regional Library District - Document No. 57Justia.comNo ratings yet
- Non-Nutritive Sucking Habit Breakers Carlos Loza and Christina Rodriguez NutritionDocument6 pagesNon-Nutritive Sucking Habit Breakers Carlos Loza and Christina Rodriguez Nutritionapi-421866375No ratings yet
- Inctrykcija Po Zkcplyatacii YLCSDocument90 pagesInctrykcija Po Zkcplyatacii YLCSpredragstojicicNo ratings yet
- UTS ENGLISH - 112011192 - Netta Delyana PutriDocument2 pagesUTS ENGLISH - 112011192 - Netta Delyana Putrinetta delyana putriNo ratings yet
- Presentation On Heineken BeerDocument13 pagesPresentation On Heineken BeerΣόλα ΚαρίμοβαNo ratings yet
- Ethics Education Package Order FormDocument1 pageEthics Education Package Order Formlinm@kilvington.vic.edu.auNo ratings yet
- Micro paraDocument7 pagesMicro paraAj MillanNo ratings yet
- Bible Timeline Card GameDocument18 pagesBible Timeline Card GameTully EhlersNo ratings yet
- EG III Generator Unit ManualDocument15 pagesEG III Generator Unit ManualLIVIANo ratings yet
- Evaluating Spoken TextsDocument4 pagesEvaluating Spoken TextsErrold SerranoNo ratings yet
- Role of Commercial Banks in The Economic Development of IndiaDocument5 pagesRole of Commercial Banks in The Economic Development of IndiaGargstudy PointNo ratings yet