Download as pdf or txt
You might also like
- Customer Specific Requirements MatrixDocument4 pagesCustomer Specific Requirements Matrixhmp9071% (7)
- Tradersworld GannDocument91 pagesTradersworld Gannnicolas arias100% (3)
- Finite Difference Methods For Two-Point Boundary Value Prob-LemsDocument3 pagesFinite Difference Methods For Two-Point Boundary Value Prob-LemsasasdNo ratings yet
- Two Degrees of Freedom 3.1Document6 pagesTwo Degrees of Freedom 3.1Mohammad Muhtasim Mashfy, 170011054No ratings yet
- Linear Transformations: DefinitionsDocument22 pagesLinear Transformations: DefinitionsMiral ElnakibNo ratings yet
- MA1511 2021S1 Chapter 4 Vector FieldsDocument22 pagesMA1511 2021S1 Chapter 4 Vector FieldsJustin NgNo ratings yet
- Example Questions and Answers EENG 482Document5 pagesExample Questions and Answers EENG 482Mackdonald ShiwaniNo ratings yet
- LESSON 2 (Final Term)Document10 pagesLESSON 2 (Final Term)Tanjil IslamNo ratings yet
- Complex Traveling-Wave and Solutions To TheDocument11 pagesComplex Traveling-Wave and Solutions To Thesongs qaumiNo ratings yet
- Lecture Note On Wind Turbine: Prepared by Minoru Taya, Jan. 26, 2016Document13 pagesLecture Note On Wind Turbine: Prepared by Minoru Taya, Jan. 26, 2016John TauloNo ratings yet
- Inverted Pendulum - A System With Innumerable ApplicationsDocument12 pagesInverted Pendulum - A System With Innumerable ApplicationsMattia PolgaNo ratings yet
- Caso Gen Rico 09-13-2021Document6 pagesCaso Gen Rico 09-13-2021Samuel Cardeña SanchezNo ratings yet
- Ordinary Differential Equations I Lecture (4) First Order Differential EquationsDocument7 pagesOrdinary Differential Equations I Lecture (4) First Order Differential EquationsWisal muhammedNo ratings yet
- EquationsDocument6 pagesEquationsDileeka DiyabalanageNo ratings yet
- Part1 VIB Subset2 Analysis of MDOF Discrete Systems #2discretisation #3equations - of - Motion v2Document16 pagesPart1 VIB Subset2 Analysis of MDOF Discrete Systems #2discretisation #3equations - of - Motion v2Faze QadriNo ratings yet
- Quiz 1 EE 472 For UNLVDocument4 pagesQuiz 1 EE 472 For UNLVistraight1No ratings yet
- Lecture 5Document4 pagesLecture 5Saadnan TahsinNo ratings yet
- Forced Response of R-L Circuits (Circuit Analysis With A DC Voltage Source)Document3 pagesForced Response of R-L Circuits (Circuit Analysis With A DC Voltage Source)Huzaifa RehanNo ratings yet
- Tutorial 4 SolutionsDocument10 pagesTutorial 4 Solutionssama abd elgelilNo ratings yet
- Answer Key: Dropbox: Problem Solving (2 Items X 10 Points)Document2 pagesAnswer Key: Dropbox: Problem Solving (2 Items X 10 Points)Shawn RelosaNo ratings yet
- FI-3103 Quantum Physics Problem Set 9b Chapter 9: Spin (Part 2)Document3 pagesFI-3103 Quantum Physics Problem Set 9b Chapter 9: Spin (Part 2)Iwenda Yudha ImaniNo ratings yet
- Examination Paper For TTT4120 Digital Signal Processing: Department of Electronic SystemsDocument7 pagesExamination Paper For TTT4120 Digital Signal Processing: Department of Electronic SystemsSr SeNo ratings yet
- Lesson 1.3Document14 pagesLesson 1.3Cotangent TwoPiNo ratings yet
- Solution of Ordinary Differential Equations (Computing) : School of Chemical and Biomedical EngineeringDocument12 pagesSolution of Ordinary Differential Equations (Computing) : School of Chemical and Biomedical EngineeringVenus LimNo ratings yet
- CF 6Document7 pagesCF 6Ali RajaNo ratings yet
- Lecture 3 - Solving de With Laplace TransformsDocument6 pagesLecture 3 - Solving de With Laplace TransformsMark Joseph Panong100% (1)
- Set 18 Solution ReviewedDocument14 pagesSet 18 Solution ReviewedMuhammad SuleetNo ratings yet
- Numerical Algebra, Control and Optimization Volume 1, Number 1, March 2011Document20 pagesNumerical Algebra, Control and Optimization Volume 1, Number 1, March 2011Costica PetreNo ratings yet
- Vector Calculus Add OnDocument86 pagesVector Calculus Add Onabiramijeyaseelan05No ratings yet
- Seismology Assignment Pradej Badalmsceq 10Document11 pagesSeismology Assignment Pradej Badalmsceq 10Rupesh UpretyNo ratings yet
- EE 351 Spring 2021 Homework 1 SolutionsDocument4 pagesEE 351 Spring 2021 Homework 1 SolutionsKalenNo ratings yet
- M3 PPT 3 Star To Delta ConversationDocument10 pagesM3 PPT 3 Star To Delta ConversationUDhayNo ratings yet
- Day-10 MAT-250 RevisedDocument8 pagesDay-10 MAT-250 RevisedFaizaNo ratings yet
- Lecture 12 and 13 Haldane1Document7 pagesLecture 12 and 13 Haldane1pankaj sharmaNo ratings yet
- Complex Numbers Additional Notes 1Document11 pagesComplex Numbers Additional Notes 1Jade GurtizaNo ratings yet
- Soal KRKK NewDocument6 pagesSoal KRKK NewGita WulandariNo ratings yet
- Mathematical AnalysisDocument2 pagesMathematical AnalysisShafqat HussainNo ratings yet
- FIN 5309 Homework 9 Solution Fall 2018: InstructionsDocument16 pagesFIN 5309 Homework 9 Solution Fall 2018: InstructionsOntime BestwritersNo ratings yet
- CHAPTER 4 - Properties of Laplace TransformsDocument5 pagesCHAPTER 4 - Properties of Laplace TransformsCamille SalmasanNo ratings yet
- ELEN3012 Quizz 2 SolutionDocument3 pagesELEN3012 Quizz 2 SolutionBongani MofokengNo ratings yet
- Signals and Systems: Lecture NotesDocument43 pagesSignals and Systems: Lecture NotesVincent GHEROLDNo ratings yet
- Ex 7 - SolutionDocument15 pagesEx 7 - SolutionAmiya Biswas100% (3)
- 2.7 Differential Equations With Coefficients Linear in X Y - Hand OutDocument10 pages2.7 Differential Equations With Coefficients Linear in X Y - Hand OutFranz Hendrix GagarinNo ratings yet
- Process Modelling and OptimizationDocument11 pagesProcess Modelling and Optimizationavish mehtaNo ratings yet
- ELE8311 - Module 2B - Inversion of Z-TransformDocument8 pagesELE8311 - Module 2B - Inversion of Z-TransformUmarSaboBabaDoguwaNo ratings yet
- EE 370: Control Systems: University of Nevada RenoDocument2 pagesEE 370: Control Systems: University of Nevada RenoMichaelNo ratings yet
- Laurent Series, Residues, and The Residue Theorem: AE 5332 - Professor Dora E. MusielakDocument18 pagesLaurent Series, Residues, and The Residue Theorem: AE 5332 - Professor Dora E. MusielakJohn100% (1)
- Problem Statement: T T T T X yDocument10 pagesProblem Statement: T T T T X yParagmoni KalitaNo ratings yet
- 5.Z - Transforms Notes1Document17 pages5.Z - Transforms Notes1312820110033 SRI PRABHU RNo ratings yet
- Analysis of Suspension Bridge Chapter 0 Parabola CableDocument7 pagesAnalysis of Suspension Bridge Chapter 0 Parabola CableSeungWoo LEENo ratings yet
- Unit 10Document3 pagesUnit 10Anonymous 0x2pwMCWgjNo ratings yet
- Paper 23-A New Type Method For The Structured Variational Inequalities ProblemDocument4 pagesPaper 23-A New Type Method For The Structured Variational Inequalities ProblemEditor IJACSANo ratings yet
- Complex AnalysisDocument43 pagesComplex AnalysisSOUHARDYA DawnNo ratings yet
- Maulina Putri Lestari - M0220052 - Tugas 3Document10 pagesMaulina Putri Lestari - M0220052 - Tugas 3Maulina Putri LestariNo ratings yet
- TranslateDocument5 pagesTranslatehesti purwasuNo ratings yet
- BS10003 Iit KGPDocument7 pagesBS10003 Iit KGPGokulNo ratings yet
- Limit and Continuity: Complex VariableDocument7 pagesLimit and Continuity: Complex VariableRokibul HasanNo ratings yet
- On Three Monotone Approximation: Mayada Ali KareemDocument4 pagesOn Three Monotone Approximation: Mayada Ali KareemMohamed Aly SowNo ratings yet
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Part1-VIB-Subset3-Analysis of MDOF-Discrete Systems-#3EoM-Flexibility Matrix of Flexural Systems v3Document22 pagesPart1-VIB-Subset3-Analysis of MDOF-Discrete Systems-#3EoM-Flexibility Matrix of Flexural Systems v3Faze QadriNo ratings yet
- Part1 VIB Subset2 Analysis of MDOF Discrete Systems #2discretisation #3equations - of - Motion v2Document16 pagesPart1 VIB Subset2 Analysis of MDOF Discrete Systems #2discretisation #3equations - of - Motion v2Faze QadriNo ratings yet
- Part1 VIB Analysis of MDOF Discrete Systems #1degrees - of - Freedom v2Document17 pagesPart1 VIB Analysis of MDOF Discrete Systems #1degrees - of - Freedom v2Faze QadriNo ratings yet
- Part1-VIB-Analysis of MDOF-Discrete Systems V11lecDocument121 pagesPart1-VIB-Analysis of MDOF-Discrete Systems V11lecFaze QadriNo ratings yet
- Control Theory Concepts For Modeling Uncertainty in Enzyme Kinetics of Biochemical NetworksDocument11 pagesControl Theory Concepts For Modeling Uncertainty in Enzyme Kinetics of Biochemical NetworksLjubisa MiskovicNo ratings yet
- TR 6Document16 pagesTR 6Hritika RajvanshiNo ratings yet
- Epson R200, R210 Visão ExplodidaDocument8 pagesEpson R200, R210 Visão ExplodidaKedinaldoNo ratings yet
- SilverCrest SHFD 1350 A1 Deep Fryer AppleDocument128 pagesSilverCrest SHFD 1350 A1 Deep Fryer AppleberjanatNo ratings yet
- Operating and Financial LeverageDocument64 pagesOperating and Financial LeverageMohammad AtherNo ratings yet
- 11th LESSON PLAN CorrectedDocument4 pages11th LESSON PLAN CorrectedDavidIsMynameNo ratings yet
- Oviedo 2016Document15 pagesOviedo 2016Dernival Venâncio Ramos JúniorNo ratings yet
- 1Document16 pages1anantha padmanabhanNo ratings yet
- WSPD Pursuit PolicyDocument7 pagesWSPD Pursuit PolicyCBS 11 NewsNo ratings yet
- PG - Microelectronics & VLSI System DesignDocument35 pagesPG - Microelectronics & VLSI System DesignBhaskar KNo ratings yet
- Form TestDocument5 pagesForm TestAndi Ramdan HamdaniNo ratings yet
- AIEEE 2012 Information BrochureDocument53 pagesAIEEE 2012 Information Brochuresd11123No ratings yet
- European Journal of Operational Research: Yong Han Ju, So Young SohnDocument8 pagesEuropean Journal of Operational Research: Yong Han Ju, So Young SohnEkoume Serges-ArmelNo ratings yet
- Simulated Binar Crossover F Continuous Search Space: Comp SystemsDocument34 pagesSimulated Binar Crossover F Continuous Search Space: Comp SystemsSal Ie EmNo ratings yet
- 2023-08-12Document5 pages2023-08-12nurull.samsiyahNo ratings yet
- International Business: by Charles W.L. HillDocument37 pagesInternational Business: by Charles W.L. Hilllongtran1191No ratings yet
- MEETING 5 - Describing PeopleDocument6 pagesMEETING 5 - Describing Peoplerizky.ameliaNo ratings yet
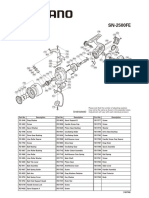
- 16SN2500FEDocument1 page16SN2500FEGergely IvánovicsNo ratings yet
- Presentation On Air Circuit Breaker: Vidhyavardhini Institute of Technolofy PALDocument23 pagesPresentation On Air Circuit Breaker: Vidhyavardhini Institute of Technolofy PALPrathamesh Mhatugade0% (1)
- SSC Maths Quiz 15Document10 pagesSSC Maths Quiz 15Tarun PandeyNo ratings yet
- Synthesis and Characterization of Cadmium Sulphide NanoparticlesDocument17 pagesSynthesis and Characterization of Cadmium Sulphide NanoparticlesHoneylyn IgnacioNo ratings yet
- Liquid Resins Additives - EmeaDocument59 pagesLiquid Resins Additives - Emearndsb.aopNo ratings yet
- Stormwater Attenuation DesignDocument3 pagesStormwater Attenuation DesignOscar vega guevaraNo ratings yet
- The RunnerDocument31 pagesThe RunnerSlliceire Liguid PlatonNo ratings yet
- Sub-Project Proposal: Municipality of Kabayan Barangay TAWANGANDocument6 pagesSub-Project Proposal: Municipality of Kabayan Barangay TAWANGANpres carap60% (5)
- Giet Cse 1801326049 Dibyaranjan Mohapatra ReportDocument67 pagesGiet Cse 1801326049 Dibyaranjan Mohapatra ReportSuman Kumari PanigrahiNo ratings yet
- 1Ø Service Manual: Engineered For LifeDocument76 pages1Ø Service Manual: Engineered For LifejewettwaterNo ratings yet
- Effectiveness of Fire Safety SystemsDocument213 pagesEffectiveness of Fire Safety SystemsHans MansNo ratings yet