Download as pdf or txt
You might also like
- Libshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewDocument16 pagesLibshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewMartinAggroweNo ratings yet
- Critical ThinkingDocument42 pagesCritical ThinkingANdy HsuNo ratings yet
- Formatting and Baseband ModulationDocument16 pagesFormatting and Baseband Modulationlongyeuhuong50% (2)
- Op Power System Harmonics W. Bin Chang: 60 RadiDocument8 pagesOp Power System Harmonics W. Bin Chang: 60 RadiFabien CallodNo ratings yet
- Analog To Digital ConversionDocument11 pagesAnalog To Digital Conversionsaurabh2078No ratings yet
- Data Converters1Document30 pagesData Converters1Vidyanand PattarNo ratings yet
- Fault Isolation Based On Wavelet TransformDocument8 pagesFault Isolation Based On Wavelet TransformArmando MaloneNo ratings yet
- Signal Processing For Effective Vibration AnalysisDocument11 pagesSignal Processing For Effective Vibration AnalysisMario Alfonso Zaragoza ZuñigaNo ratings yet
- 5990 5446enDocument18 pages5990 5446enBurgheaua Mihai AlexandruNo ratings yet
- Energies: Noise Reduction of Power Quality Measurements With Time-Frequency Depth AnalysisDocument19 pagesEnergies: Noise Reduction of Power Quality Measurements With Time-Frequency Depth AnalysisEmir JusićNo ratings yet
- Enhancing Ecg Signals Using Triangular Window Based Fir Digital Filtering TechniqueDocument7 pagesEnhancing Ecg Signals Using Triangular Window Based Fir Digital Filtering TechniqueIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- DSP 5Document32 pagesDSP 5Jayan GoelNo ratings yet
- Wavelet Based Signal Demodulation Technique For Bearing Fault DetectionDocument10 pagesWavelet Based Signal Demodulation Technique For Bearing Fault DetectionImran Sajid ShahidNo ratings yet
- Department of Electronics & Control Engineering SECX1028 - Digital Signal Processing Unit-Iv Multi Rate Digital Signal ProcessingDocument16 pagesDepartment of Electronics & Control Engineering SECX1028 - Digital Signal Processing Unit-Iv Multi Rate Digital Signal ProcessingS.DurgaNo ratings yet
- A New Power System Digital Harmonic AnalyzerDocument9 pagesA New Power System Digital Harmonic AnalyzerFabien CallodNo ratings yet
- Chapter 4 Pulse Modulation and Digital CodingDocument25 pagesChapter 4 Pulse Modulation and Digital CodingNguyễn Trường GiangNo ratings yet
- Exploring Sampling Theory, Digital Modulation Techniques, A-Law and LawDocument8 pagesExploring Sampling Theory, Digital Modulation Techniques, A-Law and LawMariam AhmedNo ratings yet
- Digitizing Signals - A Short Tutorial Guide: David M. Simpson, Antonio de StefanoDocument8 pagesDigitizing Signals - A Short Tutorial Guide: David M. Simpson, Antonio de StefanoSharyl CalibayanNo ratings yet
- WR Iee2Document6 pagesWR Iee2Sayed Ahmed Ali AlqallafNo ratings yet
- 1978 - Passband Timing Recovery in An All-Digital Modem ReceiverDocument7 pages1978 - Passband Timing Recovery in An All-Digital Modem ReceiverqasimilyasscribdNo ratings yet
- Real-Time Power System Frequency and Phasors Estimation Using Recursive Wavelet TransformDocument11 pagesReal-Time Power System Frequency and Phasors Estimation Using Recursive Wavelet Transformvj4249No ratings yet
- Ultrasonic Signal De-Noising Using Dual Filtering AlgorithmDocument8 pagesUltrasonic Signal De-Noising Using Dual Filtering Algorithmvhito619No ratings yet
- Wavelet Transform Approach To Distance: Protection of Transmission LinesDocument6 pagesWavelet Transform Approach To Distance: Protection of Transmission LinesthavaselvanNo ratings yet
- Symbol Timing Recovery Fo A Class of Constant Envelope SignalsDocument4 pagesSymbol Timing Recovery Fo A Class of Constant Envelope Signalsjoe2001coolNo ratings yet
- Performance Analysis of Phase Noise Impaired Ofdm Systeminamultipath Fading ChannelDocument6 pagesPerformance Analysis of Phase Noise Impaired Ofdm Systeminamultipath Fading Channeljagadeesh jagadeNo ratings yet
- Virtual Harmonic Analyser in LabVIEWDocument6 pagesVirtual Harmonic Analyser in LabVIEWBiljana RisteskaNo ratings yet
- A Set-Up For Measurement of Low Frequency Conductance Fluctuation (Noise) Using Digital Signal Processing TechniquesDocument25 pagesA Set-Up For Measurement of Low Frequency Conductance Fluctuation (Noise) Using Digital Signal Processing TechniquesDivya Kumar SharmaNo ratings yet
- Bandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer SystemsDocument11 pagesBandwidth Enhancement: Correcting Magnitude and Phase Distortion in Wideband Piezoelectric Transducer Systemssundari_muraliNo ratings yet
- Chapter 2Document8 pagesChapter 2Aldon JimenezNo ratings yet
- Introduction To Digital CommunicationsDocument44 pagesIntroduction To Digital CommunicationsKvnsumeshChandraNo ratings yet
- Cours Anglais 3 2020Document2 pagesCours Anglais 3 2020Hudaa EltNo ratings yet
- Université Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Document2 pagesUniversité Mohamed KHEIDER, Biskra Faculté Des Sciences Et de La Technologie Département Génie Electrique Année: 2020/2021Hudaa EltNo ratings yet
- Chapter-6 Seismic Data ProcessingDocument19 pagesChapter-6 Seismic Data Processingtarunag72801No ratings yet
- Noise Reduction of Partial Discharge Signals Using Linear Prediction and Wavelet TransformDocument6 pagesNoise Reduction of Partial Discharge Signals Using Linear Prediction and Wavelet TransformismailNo ratings yet
- Spectral Correlation Based Signal Detection MethodDocument6 pagesSpectral Correlation Based Signal Detection Methodlogu_thalirNo ratings yet
- Signal ProcessingDocument38 pagesSignal ProcessingSamson MumbaNo ratings yet
- DSP Presentation 1Document31 pagesDSP Presentation 1soumikchatterjee1912No ratings yet
- Behaviour of OFDM System Using MATLAB SimulationDocument5 pagesBehaviour of OFDM System Using MATLAB Simulationsreekanthreddy peramNo ratings yet
- Improved Extraction of Information in Bioimpedance MeasurementsDocument5 pagesImproved Extraction of Information in Bioimpedance Measurementskhungcua10No ratings yet
- Chapter 5Document22 pagesChapter 5kedirNo ratings yet
- Accurate Measurement of Power System FrequencyDocument7 pagesAccurate Measurement of Power System FrequencyOkiPetrus Hutauruk LumbanBaringinNo ratings yet
- Chapter 0121Document10 pagesChapter 0121Venice Rome RoldanNo ratings yet
- The Challenges of Precision Analog Modulation MeasurementDocument13 pagesThe Challenges of Precision Analog Modulation MeasurementriponkumarNo ratings yet
- 10 1049@iet-Gtd 2011 0592Document12 pages10 1049@iet-Gtd 2011 0592Anonymous vLerKYANo ratings yet
- Digital Signal ProcessingDocument8 pagesDigital Signal Processingmattew657No ratings yet
- Wavelet Basics PDFDocument16 pagesWavelet Basics PDFArun RajendranNo ratings yet
- Simple Methods ZCD PDFDocument5 pagesSimple Methods ZCD PDFPalhaço MalucoNo ratings yet
- ST2101Document34 pagesST2101sandeep_hotNo ratings yet
- Wavelet Transforms in Power SystemsDocument7 pagesWavelet Transforms in Power SystemsJulio FerreiraNo ratings yet
- Power Spectrum Estimation-LabSheetDocument3 pagesPower Spectrum Estimation-LabSheetJai GaizinNo ratings yet
- AM Thesis Kurt PeekDocument67 pagesAM Thesis Kurt PeekkurtpeekNo ratings yet
- Digital CommunicationDocument45 pagesDigital CommunicationgsathyascewNo ratings yet
- Lab 5 - Vibration Data AnalysisDocument5 pagesLab 5 - Vibration Data AnalysisSuper FreakNo ratings yet
- Frequency Domain Techniques For Void Spectrum Detection in Cognitive Radio NetworkDocument20 pagesFrequency Domain Techniques For Void Spectrum Detection in Cognitive Radio NetworkPRANAV KUMAR 17BEC0473No ratings yet
- New Optimized Analysis Method For Measuring Extended Grounding SystemsDocument4 pagesNew Optimized Analysis Method For Measuring Extended Grounding SystemsKiriakos SiderakisNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Digital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionFrom EverandDigital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Analytical Modeling of Wireless Communication SystemsFrom EverandAnalytical Modeling of Wireless Communication SystemsNo ratings yet
- Engineering Mechanics QuestionsDocument9 pagesEngineering Mechanics QuestionsHarshil PatelNo ratings yet
- Chapter 10 SolutionsDocument9 pagesChapter 10 Solutionsaroddddd23No ratings yet
- Lesson Plan For Law of Cosines: February 2019Document10 pagesLesson Plan For Law of Cosines: February 2019Denmark SantosNo ratings yet
- Stem Pre - Calculus WorksheetDocument21 pagesStem Pre - Calculus WorksheetIsrael Morta GarzonNo ratings yet
- Simulación en Multisim - Control de PosiciónDocument3 pagesSimulación en Multisim - Control de PosiciónLuis CJNo ratings yet
- C Programming LanguageDocument22 pagesC Programming LanguageMadhu MidhaNo ratings yet
- Columns: Md. Faisal Rahman Badal Lecturer Dept. of Mechatronics Engineering, RUETDocument25 pagesColumns: Md. Faisal Rahman Badal Lecturer Dept. of Mechatronics Engineering, RUETNaimur Asif BornoNo ratings yet
- MFS Unit No 5 Numerical FinalDocument4 pagesMFS Unit No 5 Numerical Finalcpt.ghostNo ratings yet
- RCM ExampleDocument141 pagesRCM ExampleChristopher Garcia88% (8)
- Mathematics of BookmakingDocument10 pagesMathematics of BookmakingGiorgi BalkhamishviliNo ratings yet
- CE3301 FLUID MECHANICS SyllabusDocument1 pageCE3301 FLUID MECHANICS SyllabusBaskar Singh GNo ratings yet
- Context Free GrammarsDocument36 pagesContext Free GrammarsPunya VNo ratings yet
- Static Analysis of Slug FlowDocument8 pagesStatic Analysis of Slug FlowHmd MokhtariNo ratings yet
- MAT565 - Tutorial - Inverse LaplaceDocument2 pagesMAT565 - Tutorial - Inverse LaplacefaqhrulNo ratings yet
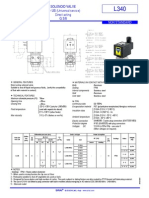
- Electrovalva Sirai L340v08GDocument2 pagesElectrovalva Sirai L340v08Ggig90No ratings yet
- The Tools of Management ScienceDocument3 pagesThe Tools of Management ScienceSuhailShaikhNo ratings yet
- CH07 Characters, Strings and StringBuilderDocument43 pagesCH07 Characters, Strings and StringBuilderNhemi EstradaNo ratings yet
- Chapter 4-Moving-Average-MethodsDocument48 pagesChapter 4-Moving-Average-MethodsThe UmiakNo ratings yet
- Fluid Phase Equilibria: Alena Randov A, Lidmila Bartovsk ADocument11 pagesFluid Phase Equilibria: Alena Randov A, Lidmila Bartovsk Aanon_837143581No ratings yet
- Packed N Fluidized BedDocument6 pagesPacked N Fluidized BedhariprakavNo ratings yet
- Final Project ReportDocument20 pagesFinal Project ReportAnonymous OE2WpW0% (1)
- The Model of Real Data Constructing Using Fractional Brownian Motion 2090 4908 1000149Document7 pagesThe Model of Real Data Constructing Using Fractional Brownian Motion 2090 4908 1000149nahv_08No ratings yet
- Frustum of Cone PDFDocument6 pagesFrustum of Cone PDFStevenzel Eala EstellaNo ratings yet
- Resonasdfance AIEEE IIT Study Material Maths CompleteDocument341 pagesResonasdfance AIEEE IIT Study Material Maths CompleteChandra SekharNo ratings yet
- Perfect Square Perfect Square Perfect Square Perfect SquareDocument32 pagesPerfect Square Perfect Square Perfect Square Perfect SquareK Satya veniNo ratings yet
- Geometry 2Document23 pagesGeometry 2Ayemyanandar KyiNo ratings yet
- 11aDocument44 pages11agegegegNo ratings yet
- XSD Tutorial - XML Schemas For BeginnersDocument28 pagesXSD Tutorial - XML Schemas For BeginnersJavier Raul Pomaya MayhuaNo ratings yet