Download as pdf or txt
You might also like
- ProjectDocument25 pagesProjectAsif Muhammad100% (2)
- Group 2 Ac Motors Technical ReportDocument12 pagesGroup 2 Ac Motors Technical Reporttristan jeff bautistaNo ratings yet
- Multiflow Transfer Pump SchematicDocument1 pageMultiflow Transfer Pump Schematicmt1128No ratings yet
- Answer: Control System (Unit 1)Document18 pagesAnswer: Control System (Unit 1)Ajeet Kumar shuklaNo ratings yet
- Electric DrivesDocument16 pagesElectric DrivesvigneshNo ratings yet
- EES (Lec20)Document16 pagesEES (Lec20)Muhammad SagheerNo ratings yet
- Type of NC SystemDocument20 pagesType of NC Systemamit kumarNo ratings yet
- Electrical MachinesDocument38 pagesElectrical Machineshephzi28100% (1)
- (I) AC and DC Tachometer Generators (Ii) Drag Cup Rotor AC (Iii) Photo-Electric Tachometer (Iv) Stroboscopic MethodsDocument7 pages(I) AC and DC Tachometer Generators (Ii) Drag Cup Rotor AC (Iii) Photo-Electric Tachometer (Iv) Stroboscopic Methodsamritsaikias4No ratings yet
- EIA Notes - Week 4Document3 pagesEIA Notes - Week 4BHARAT NIKKAMNo ratings yet
- EMI Unit 4 Part 2 - DC, AC, Stepper Motot and RelaysDocument25 pagesEMI Unit 4 Part 2 - DC, AC, Stepper Motot and RelaysAyushman SharmaNo ratings yet
- ActuatorDocument61 pagesActuatorforeverdieselNo ratings yet
- Electrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4Document250 pagesElectrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4sanjoni.jainNo ratings yet
- Introduction Robot Drive SystemsDocument17 pagesIntroduction Robot Drive SystemsTemesgen100% (2)
- IoT Extra Notes MotorsDocument3 pagesIoT Extra Notes MotorsAlroy AlmeidaNo ratings yet
- Chapter 5 Electrical MachineDocument27 pagesChapter 5 Electrical MachineBirhex FeyeNo ratings yet
- DC MotorDocument14 pagesDC MotorShreyash SargarNo ratings yet
- D3.2 ActuatorsDocument9 pagesD3.2 ActuatorsTanya AayogNo ratings yet
- Mesin Arus SearahDocument23 pagesMesin Arus SearahboypardedeNo ratings yet
- Unit 4Document16 pagesUnit 4udayoleti21005a0406No ratings yet
- Experimental and Simulation StudyDocument10 pagesExperimental and Simulation Studyمحمد عامرNo ratings yet
- Tutorial 3 19BME069Document14 pagesTutorial 3 19BME06920BME005 INAM SABRINo ratings yet
- MotorDocument32 pagesMotorDeke Elektronik IndustriNo ratings yet
- Share ElectricalDocument7 pagesShare ElectricalIsaac Stephen ApenyoNo ratings yet
- Induction MotorDocument43 pagesInduction MotorJanine Jade SetiasNo ratings yet
- ECNG-4010 Lecture 05Document37 pagesECNG-4010 Lecture 05Abel BatuNo ratings yet
- Shaded Pole Induction MotorDocument7 pagesShaded Pole Induction MotorRahul BhumkarNo ratings yet
- Assgnment MachineDocument5 pagesAssgnment MachineNur AfiqahNo ratings yet
- Chapter 4 PDFDocument62 pagesChapter 4 PDFMuhamad AmmarNo ratings yet
- Scotch Yoke MechanismDocument37 pagesScotch Yoke MechanismSaravanan Viswakarma100% (1)
- 19P205 Electrical MachinesDocument34 pages19P205 Electrical Machinessumanthlogn007No ratings yet
- Mechatronics Ktu Module 6Document36 pagesMechatronics Ktu Module 6Adarsh s nairNo ratings yet
- DC MOTOR FINALDocument28 pagesDC MOTOR FINALPial BaruaNo ratings yet
- Chapter 4Document37 pagesChapter 4Atul Jaysing PatilNo ratings yet
- DC & Ac MotorsDocument13 pagesDC & Ac MotorsYash Jude NathanNo ratings yet
- Induction MotorDocument20 pagesInduction MotorVenkata SubramanianNo ratings yet
- Investigatory Project DC Motor and Ac GeDocument29 pagesInvestigatory Project DC Motor and Ac Gemuskansaini1306No ratings yet
- AC MachinesDocument41 pagesAC Machineskr_abhijeet72356587No ratings yet
- Skip To ContentDocument17 pagesSkip To Contentkidanemariam teseraNo ratings yet
- Chapter 3 - Actuators-1Document42 pagesChapter 3 - Actuators-1NguyenNo ratings yet
- RoboticsDocument40 pagesRoboticseeesmvec4No ratings yet
- Electrical Drive Advantages of Electrical DriveDocument4 pagesElectrical Drive Advantages of Electrical DriveSylesh SreehariNo ratings yet
- Chapter 2 Prime MoversDocument90 pagesChapter 2 Prime Moversaimi wahabNo ratings yet
- Apllied PhysicsDocument9 pagesApllied PhysicsM. Qasim ZiaNo ratings yet
- Multipurpose Machines Using Scotch Yoke MechanismDocument36 pagesMultipurpose Machines Using Scotch Yoke Mechanismnithinkenator88% (16)
- Charging Systems For AutomobilesDocument56 pagesCharging Systems For AutomobilesIshu PattanayakNo ratings yet
- Projectreportmain PDFDocument36 pagesProjectreportmain PDFAnshul TailorNo ratings yet
- Introduction To DC Electric MotorsDocument31 pagesIntroduction To DC Electric MotorsJames Adrian Abalde SaboNo ratings yet
- DC MotorDocument8 pagesDC Motorven_avv3382No ratings yet
- Electrical MachinesDocument14 pagesElectrical Machinesdeepakreddy1226No ratings yet
- Lamaran NongyiDocument12 pagesLamaran NongyiTonoTonyNo ratings yet
- KronDocument4 pagesKronDeepak Singh100% (1)
- Assignment MachineDocument8 pagesAssignment MachineNur AfiqahNo ratings yet
- Enercon-Experiment 1Document10 pagesEnercon-Experiment 1Aldrin QuiambaoNo ratings yet
- Starting Methods of Syncronous Motor Criollo - RoggerDocument7 pagesStarting Methods of Syncronous Motor Criollo - RoggerRogger FabricioNo ratings yet
- Module IiDocument14 pagesModule Iisarath.mNo ratings yet
- Construction of DC MotorDocument49 pagesConstruction of DC MotorAvanish Verma100% (1)
- Synchronous MotorDocument33 pagesSynchronous Motorvnyshreyas100% (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Unit-1 Skill NotesDocument20 pagesUnit-1 Skill NotesMOUSIN PASHANo ratings yet
- Lathe NotesDocument48 pagesLathe NotesMOUSIN PASHANo ratings yet
- Mei Polytechnic: DC MotorDocument12 pagesMei Polytechnic: DC MotorMOUSIN PASHANo ratings yet
- PLC ProgramDocument5 pagesPLC ProgramMOUSIN PASHANo ratings yet
- FMCGDocument4 pagesFMCGMOUSIN PASHANo ratings yet
- Milling NotesDocument40 pagesMilling NotesMOUSIN PASHANo ratings yet
- Presention DC Motor Mousin PashaDocument11 pagesPresention DC Motor Mousin PashaMOUSIN PASHANo ratings yet
- Industrial NetDocument18 pagesIndustrial NetMOUSIN PASHANo ratings yet
- Robort Joint BKDocument14 pagesRobort Joint BKMOUSIN PASHANo ratings yet
- SCADADocument10 pagesSCADAMOUSIN PASHANo ratings yet
- HMIDocument10 pagesHMIMOUSIN PASHANo ratings yet
- Sistema Hidráulico TKNDocument9 pagesSistema Hidráulico TKNBenggi Siapo IbanezNo ratings yet
- Slew Rate The Op Amp Speed Limit PDFDocument2 pagesSlew Rate The Op Amp Speed Limit PDFShubham SharmaNo ratings yet
- IP252 COMREG e OCR5Document430 pagesIP252 COMREG e OCR5Joseph OakdenNo ratings yet
- JEE Main Electromagnetic Waves Important Questions Free PDFDocument13 pagesJEE Main Electromagnetic Waves Important Questions Free PDFPawan KumarNo ratings yet
- 2010 Legacy and Outback Wiring DiagramDocument262 pages2010 Legacy and Outback Wiring DiagramWilliam Guillen DamianNo ratings yet
- 01 WgepDocument462 pages01 WgepKenneth PaulNo ratings yet
- SWL750 DatasheetDocument1 pageSWL750 Datasheetm.hafezNo ratings yet
- Vibration Monitoring System (Detailed) Gyanendra Sharma Npti DelhiDocument114 pagesVibration Monitoring System (Detailed) Gyanendra Sharma Npti DelhiNPTINo ratings yet
- TLE Major Part 3Document8 pagesTLE Major Part 3Emelito ColentumNo ratings yet
- FRS20DDDocument102 pagesFRS20DDgermanaolxNo ratings yet
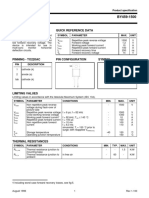
- Rectifier Diode BY459-1500 Fast, High-Voltage: General Description Quick Reference DataDocument6 pagesRectifier Diode BY459-1500 Fast, High-Voltage: General Description Quick Reference DataRusmiyanto YantoNo ratings yet
- 45TTBFDocument28 pages45TTBFRobNo ratings yet
- Experiment 1Document9 pagesExperiment 1Kenneth SablayNo ratings yet
- Hardware Components STBDocument360 pagesHardware Components STBnfmaykoxNo ratings yet
- Manual Del Reloj Checador Tcx-22Document40 pagesManual Del Reloj Checador Tcx-22Gerardo NuñezNo ratings yet
- CH 1Document30 pagesCH 1muhammad saeedNo ratings yet
- Line To Line Fault ExperimentsDocument6 pagesLine To Line Fault ExperimentsXian ChaoweNo ratings yet
- Medium Voltage Underground Power Cables CatalogueDocument43 pagesMedium Voltage Underground Power Cables CatalogueAshutosh KumarNo ratings yet
- Principle of Electronic Communication AM ReceiverDocument32 pagesPrinciple of Electronic Communication AM ReceiverChristian Dave TamparongNo ratings yet
- Battery Managment SystemDocument22 pagesBattery Managment SystemJuan Pablo VillegasNo ratings yet
- Miller 198449 BoardDocument80 pagesMiller 198449 BoardMario Emilio Castro TineoNo ratings yet
- 4 Energy Elec Q3 2021Document24 pages4 Energy Elec Q3 2021Muaze AhmedNo ratings yet
- Smart Energy MeterDocument18 pagesSmart Energy MeterMuhammad Tariq100% (1)
- Nina Medding 2020Document27 pagesNina Medding 2020Yohanes JuanNo ratings yet
- SE110 Transistor de PotenciaDocument8 pagesSE110 Transistor de PotenciajoseNo ratings yet
- Transistor As A Switch: Transistor at Cut-OffDocument3 pagesTransistor As A Switch: Transistor at Cut-Offvenkatraao784No ratings yet
- CDLF 4-14 3PH 50HZ SS-316 3-0KWDocument2 pagesCDLF 4-14 3PH 50HZ SS-316 3-0KWKunal GadeNo ratings yet
- Testing Strategies For Electronic ComponentsDocument11 pagesTesting Strategies For Electronic ComponentsRewel LacorteNo ratings yet
- Mt7986 Dfs Application NoteDocument15 pagesMt7986 Dfs Application Notem34j40r0jNo ratings yet