Download as pdf or txt
You might also like
- Yamaha X-MAX 250 Service Manual enDocument370 pagesYamaha X-MAX 250 Service Manual enpite388% (8)
- R56 Mini Cooper Timing Chain RepairDocument16 pagesR56 Mini Cooper Timing Chain RepairJames100% (3)
- JD Jackson Solution Chapter 1 and 2Document56 pagesJD Jackson Solution Chapter 1 and 2JYOTIPRASAD DEKA100% (1)
- Tutorial Stat 322 PDFDocument58 pagesTutorial Stat 322 PDFdmksNo ratings yet
- ENSC3001 - Exam NotesDocument13 pagesENSC3001 - Exam NotesGeoffreyWanNo ratings yet
- Gabion Wall Design SheetDocument3 pagesGabion Wall Design SheetTej Bdr. paliNo ratings yet
- Chapter 3Document4 pagesChapter 3Cyn SA100% (1)
- Chrysler ATF MS 9602Document1 pageChrysler ATF MS 9602Anonymous oAbjbl4HNo ratings yet
- Din 1626Document3 pagesDin 1626ArturoNo ratings yet
- Steam TracingDocument14 pagesSteam Tracingsizmaru100% (1)
- Aircraft Stability and Control - Lec10Document9 pagesAircraft Stability and Control - Lec10Akeel AliNo ratings yet
- Go, Charles Warren M. (Problem Set 4)Document19 pagesGo, Charles Warren M. (Problem Set 4)Charles Warren GoNo ratings yet
- Ex Ch1-3 (Answer)Document6 pagesEx Ch1-3 (Answer)Jeremy BibiNo ratings yet
- Mini Project Particle TechDocument10 pagesMini Project Particle TecherickhadinataNo ratings yet
- Modulo 11 Beams-Columns Members in Braced FramesDocument9 pagesModulo 11 Beams-Columns Members in Braced Framescarlomonsalve1No ratings yet
- ENGD3038 - TosionalDocument23 pagesENGD3038 - TosionalLegendaryNNo ratings yet
- Solutions Chapter 9Document34 pagesSolutions Chapter 9reloadedmemoryNo ratings yet
- Wind Loads - Per SNiPDocument7 pagesWind Loads - Per SNiPJuan Jose Gutierrez VidalNo ratings yet
- Wind Loads - Per SNiP PDFDocument7 pagesWind Loads - Per SNiP PDFronnie_syncinNo ratings yet
- Gas Ab 1Document24 pagesGas Ab 1John Leonard FazNo ratings yet
- Beam Deflection AssignmentDocument4 pagesBeam Deflection AssignmentTalha KhanNo ratings yet
- 332 4 SimpleDocument12 pages332 4 SimpleS HWNo ratings yet
- On The Generalized Differential Transform Method: Application To Fractional Integro-Differential EquationsDocument9 pagesOn The Generalized Differential Transform Method: Application To Fractional Integro-Differential EquationsKanthavel ThillaiNo ratings yet
- An Improved One Step Amplitude Frequency Relation For Non - 2023 - Results in PHDocument2 pagesAn Improved One Step Amplitude Frequency Relation For Non - 2023 - Results in PHronaldquezada038No ratings yet
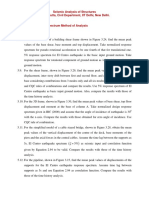
- Exercise Problems:: Seismic Analysis of Structures by TK Dutta, Civil Department, IIT Delhi, New DelhiDocument19 pagesExercise Problems:: Seismic Analysis of Structures by TK Dutta, Civil Department, IIT Delhi, New Delhitarang shethNo ratings yet
- Ginzburg-Landau EquationsDocument9 pagesGinzburg-Landau EquationsJuan Carlos Morales ParraNo ratings yet
- Problem DescriptionDocument5 pagesProblem DescriptionAngel Lisette LaoNo ratings yet
- Adaptive Control Theory: Pole-Placement and Indirect STRDocument48 pagesAdaptive Control Theory: Pole-Placement and Indirect STRThanh NguyenNo ratings yet
- Lec02 2012eightDocument5 pagesLec02 2012eightPhạm Ngọc HòaNo ratings yet
- Chapter TwoDocument18 pagesChapter TwoammarfanosNo ratings yet
- Control Y Automatización de Procesos: DOCENTE: Juan José IzurietaDocument5 pagesControl Y Automatización de Procesos: DOCENTE: Juan José IzurietaMaría Belén Zamora GuzmánNo ratings yet
- Tunnel DiodeDocument5 pagesTunnel DiodeKiran PandeyNo ratings yet
- 2D Lid Diven Cavity Final Report PDFDocument24 pages2D Lid Diven Cavity Final Report PDFVivek JoshiNo ratings yet
- Attitude Control of A QuadrotorDocument6 pagesAttitude Control of A QuadrotorGhada BeydounNo ratings yet
- Difficult Round (2015)Document9 pagesDifficult Round (2015)Camille LeiNo ratings yet
- Apuntes Mejia Hernandez Omar Uriel 1RV2Document25 pagesApuntes Mejia Hernandez Omar Uriel 1RV2Omar uriel MejiaNo ratings yet
- Hydrographic SurveysDocument6 pagesHydrographic SurveysKelly P. DionisioNo ratings yet
- Combined Stress: Problem-361Document21 pagesCombined Stress: Problem-361Rs SumitNo ratings yet
- Solved ProblemsDocument13 pagesSolved Problemsbatuhan mutlayNo ratings yet
- P5 3B Bernardo KathryneDocument5 pagesP5 3B Bernardo KathryneKATHRYNE BERNARDONo ratings yet
- Answer MT BEKC3663 20222023Document10 pagesAnswer MT BEKC3663 20222023Jeremy BibiNo ratings yet
- Module 5Document26 pagesModule 5Kim Daniel EstoyNo ratings yet
- 2016 2017 1 (Q+S) PDFDocument10 pages2016 2017 1 (Q+S) PDFmarwanNo ratings yet
- 02 045 FDS1Document8 pages02 045 FDS1Javeria NaseemNo ratings yet
- PH2130C 2006 Exam PaperaDocument7 pagesPH2130C 2006 Exam PaperabbteenagerNo ratings yet
- MA1506Document70 pagesMA1506ernie123219405No ratings yet
- Institute of Actuaries of IndiaDocument15 pagesInstitute of Actuaries of IndiaeuticusNo ratings yet
- Numerical DifferentiationDocument17 pagesNumerical DifferentiationamoNo ratings yet
- Sheet4 - SolutionsDocument6 pagesSheet4 - SolutionsNadim DossNo ratings yet
- Advanced Soil Mechanics Assignment 2018Document39 pagesAdvanced Soil Mechanics Assignment 2018AmanuelNo ratings yet
- Lesson 10 Centroids and Center of GravityDocument8 pagesLesson 10 Centroids and Center of GravityKristine PanlilioNo ratings yet
- Reference Answers For Assignment4Document4 pagesReference Answers For Assignment4creation portalNo ratings yet
- Discret IzationDocument18 pagesDiscret IzationsydofneeNo ratings yet
- Ilovepdf.com (3)Document188 pagesIlovepdf.com (3)silber5555555No ratings yet
- EE351 ProblemSet3 E Field Line SolutionDocument10 pagesEE351 ProblemSet3 E Field Line Solutionomarsiddiqui8No ratings yet
- On Integral Control in Backstepping: Analysis of Different TechniquesDocument6 pagesOn Integral Control in Backstepping: Analysis of Different TechniqueslimakmNo ratings yet
- Precalculus Cheat Sheet: 2. X-Imercept: Fix) 0Document1 pagePrecalculus Cheat Sheet: 2. X-Imercept: Fix) 0Lauren TamNo ratings yet
- 1010 ARYAN PhyDocument5 pages1010 ARYAN PhyArushi PanditaNo ratings yet
- Quadrotor Trajectory Tracking Using PID Cascade ControlDocument7 pagesQuadrotor Trajectory Tracking Using PID Cascade ControlNeide AparecidaNo ratings yet
- 05 Introduction to Digital ControlDocument6 pages05 Introduction to Digital ControlHamilton MupoperiNo ratings yet
- Taller Rendimiento TerminadoDocument11 pagesTaller Rendimiento Terminadosantiago hernandezNo ratings yet
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Aircraft Dynamic StabilityDocument13 pagesAircraft Dynamic StabilityAkeel AliNo ratings yet
- Aircraft Stability and Control - Lec10Document9 pagesAircraft Stability and Control - Lec10Akeel AliNo ratings yet
- Aircraft Stability and Control - Lec08Document15 pagesAircraft Stability and Control - Lec08Akeel AliNo ratings yet
- Aircraft Stability and Control - Lec07Document9 pagesAircraft Stability and Control - Lec07Akeel AliNo ratings yet
- Aircraft Stability and Control - Lec06Document7 pagesAircraft Stability and Control - Lec06Akeel AliNo ratings yet
- Aircraft Stability and Control - Lec04Document14 pagesAircraft Stability and Control - Lec04Akeel AliNo ratings yet
- Aircraft Stability and Control - Lec03Document10 pagesAircraft Stability and Control - Lec03Akeel AliNo ratings yet
- Aircraft Stability and Control - Lec05Document14 pagesAircraft Stability and Control - Lec05Akeel AliNo ratings yet
- Aircraft Stability and Control - Lec01Document23 pagesAircraft Stability and Control - Lec01Akeel AliNo ratings yet
- Smartshopm B57e User Manual Ylw 2017Document24 pagesSmartshopm B57e User Manual Ylw 2017luis vimos calleNo ratings yet
- Randomation Vehicle Physics ManualDocument36 pagesRandomation Vehicle Physics ManualbrokenNo ratings yet
- The Design of Network Arches: SynopsisDocument11 pagesThe Design of Network Arches: SynopsisProjesh BiswasNo ratings yet
- Dux Automatic ManualDocument17 pagesDux Automatic Manualcav4444No ratings yet
- MT Co234 - Merged - MergedDocument73 pagesMT Co234 - Merged - MergedPavas ManoharNo ratings yet
- Matrix Schedule Wps Bekapai - 3 Project: DescriptionDocument3 pagesMatrix Schedule Wps Bekapai - 3 Project: DescriptionFerdie OSNo ratings yet
- TL 80Document114 pagesTL 80louis.cauliezNo ratings yet
- Biomechanics: Course Code: BME18R351 Gokul M - Ap/BmeDocument142 pagesBiomechanics: Course Code: BME18R351 Gokul M - Ap/BmeDHINESHKUMAR M BIOM-UG - 2019 BATCHNo ratings yet
- Dynamic Analysis of An Overhead Transmission Line Subject To Gusty Wind Loading Predicted by Wind-Conductor InteractionDocument10 pagesDynamic Analysis of An Overhead Transmission Line Subject To Gusty Wind Loading Predicted by Wind-Conductor Interactionsara fernandesNo ratings yet
- Kerusakan Komponen Boiler PembangkitDocument53 pagesKerusakan Komponen Boiler PembangkitDoli MotorNo ratings yet
- 1-Axial Piston Pumps and Motors-HydromobilDocument8 pages1-Axial Piston Pumps and Motors-HydromobilSocaciu VioricaNo ratings yet
- Linked PDFDocument43 pagesLinked PDFMarcelo AguirreNo ratings yet
- AN002 Application Note: What Is A Quaternion?Document3 pagesAN002 Application Note: What Is A Quaternion?kirancallsNo ratings yet
- Strength of Materials ReviewerDocument14 pagesStrength of Materials ReviewerCARLA PASCUALNo ratings yet
- Effect of Laser Shock Processing On Fatigue Crack Growth of Duplex Stainless SteelDocument6 pagesEffect of Laser Shock Processing On Fatigue Crack Growth of Duplex Stainless SteelEstefania CovarrubiasNo ratings yet
- Technical Data Sheet: Composite Repair System For Damaged Tanks and Pressured VesselsDocument7 pagesTechnical Data Sheet: Composite Repair System For Damaged Tanks and Pressured VesselsThien NguyenNo ratings yet
- EMS Lab Manual-1Document69 pagesEMS Lab Manual-1M SamarNo ratings yet
- Assignment 10 SolutionDocument5 pagesAssignment 10 SolutiontuansyafiqNo ratings yet
- Rubber Gasket TypesDocument92 pagesRubber Gasket Typessushant_moreyNo ratings yet
- Twister For NGL Recovery PDFDocument2 pagesTwister For NGL Recovery PDFghgh140No ratings yet
- Caterpillar Cat 228 SKID STEER LOADER (Prefix 6BZ) Service Repair Manual (6BZ00001-00699)Document26 pagesCaterpillar Cat 228 SKID STEER LOADER (Prefix 6BZ) Service Repair Manual (6BZ00001-00699)rpoy9396615No ratings yet
- LS650BM0: Parts CatalogueDocument69 pagesLS650BM0: Parts CatalogueArthur OGNo ratings yet
- NPSH - Pump FundamentalsDocument19 pagesNPSH - Pump FundamentalsGeorge SharonNo ratings yet
- 150 TOP Soil Mechanics and Foundation Engineering - Civil Engineering Multiple Choice Questions and Answers PDF - MCQs Preparation For Engineering Competitive ExamsDocument12 pages150 TOP Soil Mechanics and Foundation Engineering - Civil Engineering Multiple Choice Questions and Answers PDF - MCQs Preparation For Engineering Competitive Examsthulasicivillll100% (1)