
Input LC Filters
Input LC Filters
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Wharfedale EVP X15PDocument12 pagesWharfedale EVP X15PttnaingNo ratings yet
- Final Report Buck ConverterDocument30 pagesFinal Report Buck Converter015Maulana Malik IbrahimNo ratings yet
- Boost Converter CourseworkDocument21 pagesBoost Converter Courseworkoopeoluwa_1No ratings yet
- How To Access GPIO Pins On A Cubieboard 2Document3 pagesHow To Access GPIO Pins On A Cubieboard 2palencarNo ratings yet
- Enes BOZ 18014077 Guc Elektronigi Odev 2Document7 pagesEnes BOZ 18014077 Guc Elektronigi Odev 2Enes BozNo ratings yet
- Buck Boost DesignDocument20 pagesBuck Boost DesignJitesh EmmanuelNo ratings yet
- Modelling and Regulation of Dual-Output LCLC Resonant ConvertersDocument6 pagesModelling and Regulation of Dual-Output LCLC Resonant Convertersbacuoc.nguyen356No ratings yet
- Solution To Ele22Emi 2004 November Exam: V V 0) Is Called The Zero Offset.)Document12 pagesSolution To Ele22Emi 2004 November Exam: V V 0) Is Called The Zero Offset.)سعيد ابوسريعNo ratings yet
- Didactic DC/DC Buck Converter: With Discrete PID ControllerDocument14 pagesDidactic DC/DC Buck Converter: With Discrete PID ControllerJuan DetemNo ratings yet
- IGBT Power Losses Calculation Using The Data-Sheet ParametersDocument17 pagesIGBT Power Losses Calculation Using The Data-Sheet ParametersElvis Yu100% (1)
- Basic Phase-Locked Loop: ObjectivesDocument7 pagesBasic Phase-Locked Loop: ObjectivesFabian Andres Burgos RojasNo ratings yet
- El T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersDocument23 pagesEl T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersSaied Aly SalamahNo ratings yet
- Second Order TransientsDocument6 pagesSecond Order Transientsmusy1233No ratings yet
- Analysis of D Converter: K. K. Phanisri KruthiventiDocument6 pagesAnalysis of D Converter: K. K. Phanisri KruthiventiTJPRC PublicationsNo ratings yet
- PLL-Prob&Sols (9 5 03) PDFDocument46 pagesPLL-Prob&Sols (9 5 03) PDFJavier Postigo CamposNo ratings yet
- MIT18 03SCF11 ps5 II s20sDocument5 pagesMIT18 03SCF11 ps5 II s20sBild LucaNo ratings yet
- Solu. Buck ConverterDocument3 pagesSolu. Buck ConverterTivorn HimNo ratings yet
- Tutorial DC-DC Converter Sem Ii 2016/2017: L L (Min)Document3 pagesTutorial DC-DC Converter Sem Ii 2016/2017: L L (Min)manavi naikNo ratings yet
- ECEG 351 Electronics II Spring 2019Document3 pagesECEG 351 Electronics II Spring 2019KazaValiShaikNo ratings yet
- Fast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitiesDocument14 pagesFast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitieshakikNo ratings yet
- RectifiersDocument51 pagesRectifiersfa21-bee-015100% (1)
- Boost Converter 3-2-1 Circuit Diagram and Key WaveformsDocument5 pagesBoost Converter 3-2-1 Circuit Diagram and Key WaveformswizardgrtNo ratings yet
- Art I Go CN Mac 2024 Armando VelasquezDocument7 pagesArt I Go CN Mac 2024 Armando VelasquezMaria Luisa Velasquez VelasquezNo ratings yet
- DC-DC Part 6 Double PDFDocument18 pagesDC-DC Part 6 Double PDFNarasimha RajuNo ratings yet
- EC 21008 Analog Electronic Circuits: (Given: RGI 10 KG, RG2 20 KG, Ro 10 KG, RL 1 KG, Rs 1 KG, CDocument4 pagesEC 21008 Analog Electronic Circuits: (Given: RGI 10 KG, RG2 20 KG, Ro 10 KG, RL 1 KG, Rs 1 KG, Cbrahma2deen2chaudharNo ratings yet
- Computations Power AmpDocument6 pagesComputations Power AmpJade Mark RamosNo ratings yet
- Advanced Control RDDocument6 pagesAdvanced Control RDioanaluiza27No ratings yet
- Classical and Predictive Control Applied To A DC/DC Boost ConverterDocument7 pagesClassical and Predictive Control Applied To A DC/DC Boost ConverterSantiago Cortes PerdomoNo ratings yet
- A52 4 Kapun Capacitor Less Buck ConverterDocument9 pagesA52 4 Kapun Capacitor Less Buck ConvertermuthukumartharaniNo ratings yet
- C TypefilterdesignDocument6 pagesC TypefilterdesigngogugangNo ratings yet
- A Three-Phase PWM Rectifier Using A Linear Active Disturbance Rejection ControlDocument6 pagesA Three-Phase PWM Rectifier Using A Linear Active Disturbance Rejection ControlAli BOUKHRISSNo ratings yet
- RP 2Document7 pagesRP 2Masood AlamNo ratings yet
- 15 - L-9 (DK) (Pe) ( (Ee) Nptel)Document1 page15 - L-9 (DK) (Pe) ( (Ee) Nptel)GagneNo ratings yet
- Capacitive Flux Compression GeneratorDocument6 pagesCapacitive Flux Compression GeneratorΑΝΔΡΕΑΣ ΤΣΑΓΚΟΣNo ratings yet
- Alfc N AvrDocument38 pagesAlfc N AvrElectrical engineeringNo ratings yet
- Instructions Exercises 2Document3 pagesInstructions Exercises 2jascjnxsnNo ratings yet
- Ring OscillatorDocument13 pagesRing OscillatorAnonymous eWMnRr70qNo ratings yet
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
- Lab3 DC Power Supply Design1588856969Document3 pagesLab3 DC Power Supply Design1588856969badalabhinav10No ratings yet
- Files 3-Lesson Notes Lecture 17Document6 pagesFiles 3-Lesson Notes Lecture 17kingboyNo ratings yet
- Snva 537Document51 pagesSnva 537Şahin BozkurtNo ratings yet
- 12 Pulse ConverterDocument5 pages12 Pulse ConvertersumitchintuNo ratings yet
- EC6404 Uw PDFDocument354 pagesEC6404 Uw PDFIrfan AzadNo ratings yet
- Aula Conversores CC-CC BásicosDocument44 pagesAula Conversores CC-CC BásicosVirgílio TávoraNo ratings yet
- Power Electronics 1: ENEL371S2Document21 pagesPower Electronics 1: ENEL371S2bpd21No ratings yet
- Theory: Maglev PlantDocument3 pagesTheory: Maglev PlantPraveen RathodNo ratings yet
- RTD Studies in CSTRDocument6 pagesRTD Studies in CSTRsri pragnaNo ratings yet
- List of Experiments: Part - A: Design and Implement The Analog Circuits Using Linear IcsDocument26 pagesList of Experiments: Part - A: Design and Implement The Analog Circuits Using Linear IcsVenkatGollaNo ratings yet
- EE309 Notes 20 PDFDocument3 pagesEE309 Notes 20 PDFHassan FarssiNo ratings yet
- Finals ElectricDocument1 pageFinals ElectricHoney Garrovillo GacusNo ratings yet
- RTD Studies in PFTRDocument6 pagesRTD Studies in PFTRsri pragnaNo ratings yet
- RectifierDocument53 pagesRectifierYogi Bekti P100% (1)
- TL431 Design Tips2 PDFDocument10 pagesTL431 Design Tips2 PDF3degreesNo ratings yet
- Hmwk02 SolutionDocument4 pagesHmwk02 SolutionTarik ZiadNo ratings yet
- A52 4 Kapun Capacitor Less Buck ConverterDocument9 pagesA52 4 Kapun Capacitor Less Buck ConverterSon TelmanNo ratings yet
- Sine PWM Inverter-ProgramDocument26 pagesSine PWM Inverter-ProgramAhmed El SebaiiNo ratings yet
- Jee Advance 1 Paper 2 SolDocument12 pagesJee Advance 1 Paper 2 SoliLearn MathNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Organic Light-Emitting Transistors: Towards the Next Generation Display TechnologyFrom EverandOrganic Light-Emitting Transistors: Towards the Next Generation Display TechnologyNo ratings yet
- Advanced Mathematics MTechDocument60 pagesAdvanced Mathematics MTechAnshuman MohantyNo ratings yet
- Stochastic Process LecturesDocument67 pagesStochastic Process LecturesAnshuman MohantyNo ratings yet
- Simbus Bondgraphs User guide-SR2022.0.1.1Document482 pagesSimbus Bondgraphs User guide-SR2022.0.1.1Anshuman MohantyNo ratings yet
- Control of A DC-DC Buck Converter Through ContractDocument17 pagesControl of A DC-DC Buck Converter Through ContractAnshuman MohantyNo ratings yet
- CS1B Y1 Assignment Questions 2022 V01 2 PDFDocument4 pagesCS1B Y1 Assignment Questions 2022 V01 2 PDFAnshuman MohantyNo ratings yet
- Energies 14 07901Document25 pagesEnergies 14 07901Anshuman MohantyNo ratings yet
- Cost MinimizationDocument15 pagesCost MinimizationAnshuman MohantyNo ratings yet
- DosusbDocument17 pagesDosusbselmeco690No ratings yet
- Service Manual: Color Television Chassis No. GA-1'Document28 pagesService Manual: Color Television Chassis No. GA-1'tecniconivelNo ratings yet
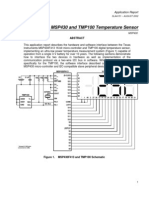
- Interfacing The MSP430 and TMP100 Temperature SensorDocument7 pagesInterfacing The MSP430 and TMP100 Temperature SensorJohnny Di SantoNo ratings yet
- Circuit Theory TutelDocument8 pagesCircuit Theory TutelManoj ChandraNo ratings yet
- E 03 CH 41Document1 pageE 03 CH 41YK HL100% (1)
- DB750X UserManualDocument46 pagesDB750X UserManualBob GageNo ratings yet
- Panasonic TX-21JT2 Chassis ZM3LDocument17 pagesPanasonic TX-21JT2 Chassis ZM3LFlorin CostinNo ratings yet
- Peoplelink Dsp-Cm-Pro: Key FeaturesDocument3 pagesPeoplelink Dsp-Cm-Pro: Key FeaturesRohit sNo ratings yet
- Soil Moisture SensorDocument5 pagesSoil Moisture SensorResearchDesignLabNo ratings yet
- Man Sound Level Meter Pce 322a en PDFDocument18 pagesMan Sound Level Meter Pce 322a en PDFAndhita HermandaNo ratings yet
- PIC18F97J60 FAMILY: 64/80/100-Pin High-Performance, 1-Mbit Flash Microcontrollers With EthernetDocument6 pagesPIC18F97J60 FAMILY: 64/80/100-Pin High-Performance, 1-Mbit Flash Microcontrollers With EthernetDESTROYER2020No ratings yet
- Evq99 351845951Document19 pagesEvq99 351845951finchNo ratings yet
- CBIP 317 - 501 To 589 PagesDocument89 pagesCBIP 317 - 501 To 589 PagesVinodKandukuriNo ratings yet
- P64x EN AP A11Document92 pagesP64x EN AP A11Sakthi Krishnan0% (1)
- NTE56004 Thru NTE56010 TRIAC, 15 Amp: FeaturesDocument2 pagesNTE56004 Thru NTE56010 TRIAC, 15 Amp: FeaturesFreddy SarabiaNo ratings yet
- Modeling and Simulation LabDocument57 pagesModeling and Simulation LabSakthikumar BalasundaramNo ratings yet
- Image Demosaicing: Ruiwen Zhen and Robert L. StevensonDocument11 pagesImage Demosaicing: Ruiwen Zhen and Robert L. StevensonAugustoZebadúaNo ratings yet
- TL-W Ds e 11 1 csm469Document9 pagesTL-W Ds e 11 1 csm469one_blanche6175No ratings yet
- 8086 Min Max Mode Operations ModifiedDocument78 pages8086 Min Max Mode Operations ModifiedRitu RathiNo ratings yet
- אסמבלר- מעבדה 1, מסכםDocument5 pagesאסמבלר- מעבדה 1, מסכםRonNo ratings yet
- Datasheet 3RW4447-6BC44 EnglishDocument4 pagesDatasheet 3RW4447-6BC44 EnglishUm DamiNo ratings yet
- C700 As Software Defined Radio Proposal For STPL HyderabadDocument14 pagesC700 As Software Defined Radio Proposal For STPL HyderabadadarshNo ratings yet
- Basic EE Week 8 Lesson - 864873286Document33 pagesBasic EE Week 8 Lesson - 864873286Reinier FrancoNo ratings yet
- HP Pro 610 Manual TecnicoDocument63 pagesHP Pro 610 Manual TecnicoMartinAmg100% (1)
- 8086 Microprocesser InstructionsDocument22 pages8086 Microprocesser InstructionsSaddam HussainNo ratings yet
- Factory Configuration - ATV12 - User Manual - 2010 - en - bbv28581 - 02Document1 pageFactory Configuration - ATV12 - User Manual - 2010 - en - bbv28581 - 02asca barbesNo ratings yet
- Onkyo SL105 - HTP-2 Subwoofer System SMDocument19 pagesOnkyo SL105 - HTP-2 Subwoofer System SMlasser22832165No ratings yet




























































































Download as pdf or txt
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Wharfedale EVP X15PDocument12 pagesWharfedale EVP X15PttnaingNo ratings yet
- Final Report Buck ConverterDocument30 pagesFinal Report Buck Converter015Maulana Malik IbrahimNo ratings yet
- Boost Converter CourseworkDocument21 pagesBoost Converter Courseworkoopeoluwa_1No ratings yet
- How To Access GPIO Pins On A Cubieboard 2Document3 pagesHow To Access GPIO Pins On A Cubieboard 2palencarNo ratings yet
- Enes BOZ 18014077 Guc Elektronigi Odev 2Document7 pagesEnes BOZ 18014077 Guc Elektronigi Odev 2Enes BozNo ratings yet
- Buck Boost DesignDocument20 pagesBuck Boost DesignJitesh EmmanuelNo ratings yet
- Modelling and Regulation of Dual-Output LCLC Resonant ConvertersDocument6 pagesModelling and Regulation of Dual-Output LCLC Resonant Convertersbacuoc.nguyen356No ratings yet
- Solution To Ele22Emi 2004 November Exam: V V 0) Is Called The Zero Offset.)Document12 pagesSolution To Ele22Emi 2004 November Exam: V V 0) Is Called The Zero Offset.)سعيد ابوسريعNo ratings yet
- Didactic DC/DC Buck Converter: With Discrete PID ControllerDocument14 pagesDidactic DC/DC Buck Converter: With Discrete PID ControllerJuan DetemNo ratings yet
- IGBT Power Losses Calculation Using The Data-Sheet ParametersDocument17 pagesIGBT Power Losses Calculation Using The Data-Sheet ParametersElvis Yu100% (1)
- Basic Phase-Locked Loop: ObjectivesDocument7 pagesBasic Phase-Locked Loop: ObjectivesFabian Andres Burgos RojasNo ratings yet
- El T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersDocument23 pagesEl T I III Electronics III: - Power Dissipation in CMOS Digital Circuits - Optimization of Chain of InvertersSaied Aly SalamahNo ratings yet
- Second Order TransientsDocument6 pagesSecond Order Transientsmusy1233No ratings yet
- Analysis of D Converter: K. K. Phanisri KruthiventiDocument6 pagesAnalysis of D Converter: K. K. Phanisri KruthiventiTJPRC PublicationsNo ratings yet
- PLL-Prob&Sols (9 5 03) PDFDocument46 pagesPLL-Prob&Sols (9 5 03) PDFJavier Postigo CamposNo ratings yet
- MIT18 03SCF11 ps5 II s20sDocument5 pagesMIT18 03SCF11 ps5 II s20sBild LucaNo ratings yet
- Solu. Buck ConverterDocument3 pagesSolu. Buck ConverterTivorn HimNo ratings yet
- Tutorial DC-DC Converter Sem Ii 2016/2017: L L (Min)Document3 pagesTutorial DC-DC Converter Sem Ii 2016/2017: L L (Min)manavi naikNo ratings yet
- ECEG 351 Electronics II Spring 2019Document3 pagesECEG 351 Electronics II Spring 2019KazaValiShaikNo ratings yet
- Fast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitiesDocument14 pagesFast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitieshakikNo ratings yet
- RectifiersDocument51 pagesRectifiersfa21-bee-015100% (1)
- Boost Converter 3-2-1 Circuit Diagram and Key WaveformsDocument5 pagesBoost Converter 3-2-1 Circuit Diagram and Key WaveformswizardgrtNo ratings yet
- Art I Go CN Mac 2024 Armando VelasquezDocument7 pagesArt I Go CN Mac 2024 Armando VelasquezMaria Luisa Velasquez VelasquezNo ratings yet
- DC-DC Part 6 Double PDFDocument18 pagesDC-DC Part 6 Double PDFNarasimha RajuNo ratings yet
- EC 21008 Analog Electronic Circuits: (Given: RGI 10 KG, RG2 20 KG, Ro 10 KG, RL 1 KG, Rs 1 KG, CDocument4 pagesEC 21008 Analog Electronic Circuits: (Given: RGI 10 KG, RG2 20 KG, Ro 10 KG, RL 1 KG, Rs 1 KG, Cbrahma2deen2chaudharNo ratings yet
- Computations Power AmpDocument6 pagesComputations Power AmpJade Mark RamosNo ratings yet
- Advanced Control RDDocument6 pagesAdvanced Control RDioanaluiza27No ratings yet
- Classical and Predictive Control Applied To A DC/DC Boost ConverterDocument7 pagesClassical and Predictive Control Applied To A DC/DC Boost ConverterSantiago Cortes PerdomoNo ratings yet
- A52 4 Kapun Capacitor Less Buck ConverterDocument9 pagesA52 4 Kapun Capacitor Less Buck ConvertermuthukumartharaniNo ratings yet
- C TypefilterdesignDocument6 pagesC TypefilterdesigngogugangNo ratings yet
- A Three-Phase PWM Rectifier Using A Linear Active Disturbance Rejection ControlDocument6 pagesA Three-Phase PWM Rectifier Using A Linear Active Disturbance Rejection ControlAli BOUKHRISSNo ratings yet
- RP 2Document7 pagesRP 2Masood AlamNo ratings yet
- 15 - L-9 (DK) (Pe) ( (Ee) Nptel)Document1 page15 - L-9 (DK) (Pe) ( (Ee) Nptel)GagneNo ratings yet
- Capacitive Flux Compression GeneratorDocument6 pagesCapacitive Flux Compression GeneratorΑΝΔΡΕΑΣ ΤΣΑΓΚΟΣNo ratings yet
- Alfc N AvrDocument38 pagesAlfc N AvrElectrical engineeringNo ratings yet
- Instructions Exercises 2Document3 pagesInstructions Exercises 2jascjnxsnNo ratings yet
- Ring OscillatorDocument13 pagesRing OscillatorAnonymous eWMnRr70qNo ratings yet
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
- Lab3 DC Power Supply Design1588856969Document3 pagesLab3 DC Power Supply Design1588856969badalabhinav10No ratings yet
- Files 3-Lesson Notes Lecture 17Document6 pagesFiles 3-Lesson Notes Lecture 17kingboyNo ratings yet
- Snva 537Document51 pagesSnva 537Şahin BozkurtNo ratings yet
- 12 Pulse ConverterDocument5 pages12 Pulse ConvertersumitchintuNo ratings yet
- EC6404 Uw PDFDocument354 pagesEC6404 Uw PDFIrfan AzadNo ratings yet
- Aula Conversores CC-CC BásicosDocument44 pagesAula Conversores CC-CC BásicosVirgílio TávoraNo ratings yet
- Power Electronics 1: ENEL371S2Document21 pagesPower Electronics 1: ENEL371S2bpd21No ratings yet
- Theory: Maglev PlantDocument3 pagesTheory: Maglev PlantPraveen RathodNo ratings yet
- RTD Studies in CSTRDocument6 pagesRTD Studies in CSTRsri pragnaNo ratings yet
- List of Experiments: Part - A: Design and Implement The Analog Circuits Using Linear IcsDocument26 pagesList of Experiments: Part - A: Design and Implement The Analog Circuits Using Linear IcsVenkatGollaNo ratings yet
- EE309 Notes 20 PDFDocument3 pagesEE309 Notes 20 PDFHassan FarssiNo ratings yet
- Finals ElectricDocument1 pageFinals ElectricHoney Garrovillo GacusNo ratings yet
- RTD Studies in PFTRDocument6 pagesRTD Studies in PFTRsri pragnaNo ratings yet
- RectifierDocument53 pagesRectifierYogi Bekti P100% (1)
- TL431 Design Tips2 PDFDocument10 pagesTL431 Design Tips2 PDF3degreesNo ratings yet
- Hmwk02 SolutionDocument4 pagesHmwk02 SolutionTarik ZiadNo ratings yet
- A52 4 Kapun Capacitor Less Buck ConverterDocument9 pagesA52 4 Kapun Capacitor Less Buck ConverterSon TelmanNo ratings yet
- Sine PWM Inverter-ProgramDocument26 pagesSine PWM Inverter-ProgramAhmed El SebaiiNo ratings yet
- Jee Advance 1 Paper 2 SolDocument12 pagesJee Advance 1 Paper 2 SoliLearn MathNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Organic Light-Emitting Transistors: Towards the Next Generation Display TechnologyFrom EverandOrganic Light-Emitting Transistors: Towards the Next Generation Display TechnologyNo ratings yet
- Advanced Mathematics MTechDocument60 pagesAdvanced Mathematics MTechAnshuman MohantyNo ratings yet
- Stochastic Process LecturesDocument67 pagesStochastic Process LecturesAnshuman MohantyNo ratings yet
- Simbus Bondgraphs User guide-SR2022.0.1.1Document482 pagesSimbus Bondgraphs User guide-SR2022.0.1.1Anshuman MohantyNo ratings yet
- Control of A DC-DC Buck Converter Through ContractDocument17 pagesControl of A DC-DC Buck Converter Through ContractAnshuman MohantyNo ratings yet
- CS1B Y1 Assignment Questions 2022 V01 2 PDFDocument4 pagesCS1B Y1 Assignment Questions 2022 V01 2 PDFAnshuman MohantyNo ratings yet
- Energies 14 07901Document25 pagesEnergies 14 07901Anshuman MohantyNo ratings yet
- Cost MinimizationDocument15 pagesCost MinimizationAnshuman MohantyNo ratings yet
- DosusbDocument17 pagesDosusbselmeco690No ratings yet
- Service Manual: Color Television Chassis No. GA-1'Document28 pagesService Manual: Color Television Chassis No. GA-1'tecniconivelNo ratings yet
- Interfacing The MSP430 and TMP100 Temperature SensorDocument7 pagesInterfacing The MSP430 and TMP100 Temperature SensorJohnny Di SantoNo ratings yet
- Circuit Theory TutelDocument8 pagesCircuit Theory TutelManoj ChandraNo ratings yet
- E 03 CH 41Document1 pageE 03 CH 41YK HL100% (1)
- DB750X UserManualDocument46 pagesDB750X UserManualBob GageNo ratings yet
- Panasonic TX-21JT2 Chassis ZM3LDocument17 pagesPanasonic TX-21JT2 Chassis ZM3LFlorin CostinNo ratings yet
- Peoplelink Dsp-Cm-Pro: Key FeaturesDocument3 pagesPeoplelink Dsp-Cm-Pro: Key FeaturesRohit sNo ratings yet
- Soil Moisture SensorDocument5 pagesSoil Moisture SensorResearchDesignLabNo ratings yet
- Man Sound Level Meter Pce 322a en PDFDocument18 pagesMan Sound Level Meter Pce 322a en PDFAndhita HermandaNo ratings yet
- PIC18F97J60 FAMILY: 64/80/100-Pin High-Performance, 1-Mbit Flash Microcontrollers With EthernetDocument6 pagesPIC18F97J60 FAMILY: 64/80/100-Pin High-Performance, 1-Mbit Flash Microcontrollers With EthernetDESTROYER2020No ratings yet
- Evq99 351845951Document19 pagesEvq99 351845951finchNo ratings yet
- CBIP 317 - 501 To 589 PagesDocument89 pagesCBIP 317 - 501 To 589 PagesVinodKandukuriNo ratings yet
- P64x EN AP A11Document92 pagesP64x EN AP A11Sakthi Krishnan0% (1)
- NTE56004 Thru NTE56010 TRIAC, 15 Amp: FeaturesDocument2 pagesNTE56004 Thru NTE56010 TRIAC, 15 Amp: FeaturesFreddy SarabiaNo ratings yet
- Modeling and Simulation LabDocument57 pagesModeling and Simulation LabSakthikumar BalasundaramNo ratings yet
- Image Demosaicing: Ruiwen Zhen and Robert L. StevensonDocument11 pagesImage Demosaicing: Ruiwen Zhen and Robert L. StevensonAugustoZebadúaNo ratings yet
- TL-W Ds e 11 1 csm469Document9 pagesTL-W Ds e 11 1 csm469one_blanche6175No ratings yet
- 8086 Min Max Mode Operations ModifiedDocument78 pages8086 Min Max Mode Operations ModifiedRitu RathiNo ratings yet
- אסמבלר- מעבדה 1, מסכםDocument5 pagesאסמבלר- מעבדה 1, מסכםRonNo ratings yet
- Datasheet 3RW4447-6BC44 EnglishDocument4 pagesDatasheet 3RW4447-6BC44 EnglishUm DamiNo ratings yet
- C700 As Software Defined Radio Proposal For STPL HyderabadDocument14 pagesC700 As Software Defined Radio Proposal For STPL HyderabadadarshNo ratings yet
- Basic EE Week 8 Lesson - 864873286Document33 pagesBasic EE Week 8 Lesson - 864873286Reinier FrancoNo ratings yet
- HP Pro 610 Manual TecnicoDocument63 pagesHP Pro 610 Manual TecnicoMartinAmg100% (1)
- 8086 Microprocesser InstructionsDocument22 pages8086 Microprocesser InstructionsSaddam HussainNo ratings yet
- Factory Configuration - ATV12 - User Manual - 2010 - en - bbv28581 - 02Document1 pageFactory Configuration - ATV12 - User Manual - 2010 - en - bbv28581 - 02asca barbesNo ratings yet
- Onkyo SL105 - HTP-2 Subwoofer System SMDocument19 pagesOnkyo SL105 - HTP-2 Subwoofer System SMlasser22832165No ratings yet