Download as pdf or txt
You might also like
- Linear Algebra With Applications 9th Edition Leon Solutions ManualDocument32 pagesLinear Algebra With Applications 9th Edition Leon Solutions ManualLafoot BabuNo ratings yet
- Introduction To Linear Algebra D NormanDocument575 pagesIntroduction To Linear Algebra D NormanYashish Mareachealee100% (10)
- Overlord Volume 15 - The Half-Elf God-Kin Part IDocument38 pagesOverlord Volume 15 - The Half-Elf God-Kin Part ILeifin 520No ratings yet
- Math 241 Section 2.1 (3-2-2021)Document20 pagesMath 241 Section 2.1 (3-2-2021)H ANo ratings yet
- Math 241 Section 1.1 (3-2-2021)Document21 pagesMath 241 Section 1.1 (3-2-2021)H ANo ratings yet
- Math 241 Section 2.2 (8-2-2021)Document25 pagesMath 241 Section 2.2 (8-2-2021)H ANo ratings yet
- Linear Algebra I-1 PDFDocument146 pagesLinear Algebra I-1 PDFDoktoru ShekaNo ratings yet
- HELM Workbook9 Vectors PDFDocument70 pagesHELM Workbook9 Vectors PDFMary Bena DuhaylungsodNo ratings yet
- Introduction To Computer GraphicsDocument26 pagesIntroduction To Computer GraphicsRajasekharReddyGajulapaalliNo ratings yet
- Maths Roadmap For Machine LearningDocument16 pagesMaths Roadmap For Machine LearningamriteshworkNo ratings yet
- Introduction To Eigenvalues and EigenvectorsDocument10 pagesIntroduction To Eigenvalues and Eigenvectorsmatifb011No ratings yet
- Mathematics For Machine LearningDocument52 pagesMathematics For Machine LearningVaibhav PathakNo ratings yet
- Linear Algebra Applications in RDocument54 pagesLinear Algebra Applications in RryrytNo ratings yet
- Session 2 On Linear AlgenraDocument21 pagesSession 2 On Linear AlgenraNanda KishoreNo ratings yet
- Vector Calculus: R NaveDocument2 pagesVector Calculus: R NavegsigalaoNo ratings yet
- Research Notes On Linear AgebraDocument98 pagesResearch Notes On Linear Agebrabanaje CaesarNo ratings yet
- Checklist c1Document3 pagesChecklist c1Arwa HamdiNo ratings yet
- Linear Algebra SyllabusDocument3 pagesLinear Algebra SyllabusJunaid AftabNo ratings yet
- JEE Main 2024 Detailed Syllabus TrackerDocument24 pagesJEE Main 2024 Detailed Syllabus TrackerDiptimayee SamalNo ratings yet
- Syllabus of Ktu IC s3Document3 pagesSyllabus of Ktu IC s3Shanu ApNo ratings yet
- Vector CalculusDocument96 pagesVector CalculusMohamed Achraf EL BAKKALINo ratings yet
- Introduction To Three Dimensional Geometry: General Key ConceptsDocument5 pagesIntroduction To Three Dimensional Geometry: General Key ConceptsGurpreet SinghNo ratings yet
- 01 Paper 01 Linear AlgebraDocument2 pages01 Paper 01 Linear AlgebraAvinash PalaparthiNo ratings yet
- Matrices & Linear Algebra Module G-20 (Maths) : Day Date DAY Unit Topic Sub-Topics Exercise InstructionsDocument2 pagesMatrices & Linear Algebra Module G-20 (Maths) : Day Date DAY Unit Topic Sub-Topics Exercise InstructionssagarNo ratings yet
- 2021 Technical Mathematics ATP GRADE 11Document3 pages2021 Technical Mathematics ATP GRADE 11radinneofentse67No ratings yet
- 1st Quarter - Math 9 CURR MAPDocument2 pages1st Quarter - Math 9 CURR MAPJayshel Janine ApagaNo ratings yet
- Matlab Lecture 3Document15 pagesMatlab Lecture 3waqasNo ratings yet
- Outline: Numerical Analysis of Engineering SystemsDocument22 pagesOutline: Numerical Analysis of Engineering SystemskanirajNo ratings yet
- Syllabus Comparison - XII MathsDocument4 pagesSyllabus Comparison - XII MathsSparsh SinghalNo ratings yet
- Vector Calculus and Linear Algebra: Gujarat Technological UniversityDocument3 pagesVector Calculus and Linear Algebra: Gujarat Technological Universitygecg ICNo ratings yet
- Curriculum Map S.Y 2019 - 2020: St. Francis Xavier Academy of Kapatagan IncDocument7 pagesCurriculum Map S.Y 2019 - 2020: St. Francis Xavier Academy of Kapatagan Incjoan niniNo ratings yet
- MA2001 - Vector Differential CalculusDocument39 pagesMA2001 - Vector Differential CalculusMatthew LauNo ratings yet
- TOS - Math 8 Second Quarter UploadDocument1 pageTOS - Math 8 Second Quarter UploadOscar EscaranNo ratings yet
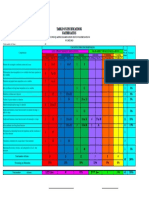
- Table of Specification For The Quarterly Examination in Mathematics 7Document2 pagesTable of Specification For The Quarterly Examination in Mathematics 7Mailyn SimanNo ratings yet
- Linear Algebra and Vector CalculusDocument3 pagesLinear Algebra and Vector CalculusRoki BullNo ratings yet
- Precalculus Curriculum Maps - 6 - 12 - 14revDocument3 pagesPrecalculus Curriculum Maps - 6 - 12 - 14revraymart zalunNo ratings yet
- Matrix - Algebra ReviewDocument25 pagesMatrix - Algebra Reviewandres felipe otero rojasNo ratings yet
- L04 Maths FoundationsDocument30 pagesL04 Maths FoundationsJuwii ChanNo ratings yet
- Linear Algebra Student NotesDocument3 pagesLinear Algebra Student NotesJaromír KoflákNo ratings yet
- Outline: Linear Algebra and Calculus: Nternational Chool of ConomicsDocument5 pagesOutline: Linear Algebra and Calculus: Nternational Chool of ConomicsElgün AbdullayevNo ratings yet
- MA201 Linear Algebra and Complex AnalysisDocument3 pagesMA201 Linear Algebra and Complex AnalysisJustin SajuNo ratings yet
- Cur Map Sample 2Document3 pagesCur Map Sample 2GIL tabilingNo ratings yet
- Lec 1 - Maths in ML IDocument38 pagesLec 1 - Maths in ML I14 Asif AkhtarNo ratings yet
- 115af18 Lecture NotesDocument59 pages115af18 Lecture NotesShela RamosNo ratings yet
- COURSE OUTLINE Linear AlgebraDocument6 pagesCOURSE OUTLINE Linear AlgebraMBIEDA NGOMEGNI FRANK GAETANNo ratings yet
- ENGR 365 Module 1 Vector Calculus ReviewDocument27 pagesENGR 365 Module 1 Vector Calculus Reviewxenping234No ratings yet
- Application of Matrices in Human's LifeDocument6 pagesApplication of Matrices in Human's LifeATSNo ratings yet
- Linear - Algebra-Lecture - Notes - 2 (WEEK 3)Document65 pagesLinear - Algebra-Lecture - Notes - 2 (WEEK 3)Bevold LineNo ratings yet
- Matrices and Determinants Notes EnglishDocument227 pagesMatrices and Determinants Notes EnglishBasant KumarNo ratings yet
- Crash Course in Analytics For Non Analytics ManagersDocument74 pagesCrash Course in Analytics For Non Analytics ManagersUzair FaruqiNo ratings yet
- MATH 120-Linear Algebra With Differential Equations-Muhammad Usman-Ali AshherDocument3 pagesMATH 120-Linear Algebra With Differential Equations-Muhammad Usman-Ali AshherHamza SohailNo ratings yet
- Syllabus EE204Document5 pagesSyllabus EE204Mohammad ForsanNo ratings yet
- Year 11 Maths Methods Term 2 2023 V2Document3 pagesYear 11 Maths Methods Term 2 2023 V2Hannah LeeNo ratings yet
- Vector Calculus Study GuideDocument32 pagesVector Calculus Study GuideChristian GaoNo ratings yet
- Table of Specification 9.1Document2 pagesTable of Specification 9.1Promise SalvatieraNo ratings yet
- Curve fitting-I-IIDocument12 pagesCurve fitting-I-IIRajan SinghNo ratings yet
- Merged M1Document182 pagesMerged M1Infi Coaching CenterNo ratings yet
- Vector CalculusDocument4 pagesVector CalculusNirmal BhowmickNo ratings yet
- Math 241 Section 2.2 (8-2-2021)Document25 pagesMath 241 Section 2.2 (8-2-2021)H ANo ratings yet
- Math 241 Section 2.1 (3-2-2021)Document20 pagesMath 241 Section 2.1 (3-2-2021)H ANo ratings yet
- Math 241 Section 1.1 (3-2-2021)Document21 pagesMath 241 Section 1.1 (3-2-2021)H ANo ratings yet
- Chapter 6Document39 pagesChapter 6H ANo ratings yet
- Chapter 2Document49 pagesChapter 2H ANo ratings yet
- Chapter 4 LectureDocument71 pagesChapter 4 LectureH ANo ratings yet
- Chapter 3 LectureDocument50 pagesChapter 3 LectureH ANo ratings yet
- Chapter 1Document42 pagesChapter 1H ANo ratings yet
- Questions Chapter 1 Chem 101Document6 pagesQuestions Chapter 1 Chem 101H ANo ratings yet
- Energies 13 00610 v2 PDFDocument25 pagesEnergies 13 00610 v2 PDFIsmail ŞahbazNo ratings yet
- WBT LectureDocument55 pagesWBT LectureAbegael YumoNo ratings yet
- MAK211E Probability and Statistics - 5Document21 pagesMAK211E Probability and Statistics - 5mccenkizNo ratings yet
- Pines of Perinton StatementDocument1 pagePines of Perinton StatementNews10NBCNo ratings yet
- Movement Competency Training Module No. 5Document3 pagesMovement Competency Training Module No. 5Jhon Keneth NamiasNo ratings yet
- Maths AT1 175969Document3 pagesMaths AT1 175969Dylan TaylorNo ratings yet
- Unit6 TestDocument3 pagesUnit6 TestGhaith AlturjmanNo ratings yet
- ENGR2000 Fluid Mechanics Semester 1 2023 Bentley Perth Campus INTDocument12 pagesENGR2000 Fluid Mechanics Semester 1 2023 Bentley Perth Campus INTpiyalperera12No ratings yet
- NA912FRDocument14 pagesNA912FRA MahmoodNo ratings yet
- Blackhole MandelbrotDocument12 pagesBlackhole MandelbrotWilliam H SinerisNo ratings yet
- Drone PDFDocument18 pagesDrone PDFdreamtheater666No ratings yet
- The Varieties of Economic Rationality From Adam Smith To Contemporary Behavioural and Evolutionary EconomicsDocument188 pagesThe Varieties of Economic Rationality From Adam Smith To Contemporary Behavioural and Evolutionary EconomicsShatu CarreraNo ratings yet
- IB Middle Years Programme (MYP) Semester One Progress ReportDocument18 pagesIB Middle Years Programme (MYP) Semester One Progress ReportFaisal AlfozanNo ratings yet
- End-Of-Course Test (Word)Document5 pagesEnd-Of-Course Test (Word)Gabriel Eduardo Rodriguez GarzaNo ratings yet
- QABD OverviewDocument70 pagesQABD OverviewSai VarunNo ratings yet
- Chapter 17 SustainabilityDocument28 pagesChapter 17 SustainabilitySyed Raihan Mahmood 2125069660No ratings yet
- Dwnload Full Strategy 4th Edition Bob de Wit Solutions Manual PDFDocument35 pagesDwnload Full Strategy 4th Edition Bob de Wit Solutions Manual PDFditetocsine3fxd100% (16)
- New Horizon SheetDocument2 pagesNew Horizon Sheetdarken wingsNo ratings yet
- 2021.02.19. Bovids Illiterate Mother Truth About Lying ReadDocument13 pages2021.02.19. Bovids Illiterate Mother Truth About Lying ReadTruong PhanNo ratings yet
- Scheduling of Vehicles From A Central Depot To A Number of Delivery PointsDocument15 pagesScheduling of Vehicles From A Central Depot To A Number of Delivery PointsMy NguyễnNo ratings yet
- Insulating Gaskets & Its Practical DifficultiesDocument6 pagesInsulating Gaskets & Its Practical Difficulties4A28Sparsh JainNo ratings yet
- Reply Code Challenge 2019 - Teen Edition - TeleportationDocument2 pagesReply Code Challenge 2019 - Teen Edition - Teleportationavash royNo ratings yet
- ISB FPM Brochure 2021Document13 pagesISB FPM Brochure 2021Amritesh RayNo ratings yet
- The Origins of Arbitrariness in Language: January 2004Document7 pagesThe Origins of Arbitrariness in Language: January 2004Kapela AjayNo ratings yet
- Flash Calc 3Document16 pagesFlash Calc 3Mohamed MamdouhNo ratings yet
- Passages For The SATDocument54 pagesPassages For The SATNguyễn Tùng50% (10)
- Computational Thinking, The Skill Set of The 21st CenturyDocument8 pagesComputational Thinking, The Skill Set of The 21st CenturyOlowosulu Tunde PeterNo ratings yet
- Appendix PAINTDocument14 pagesAppendix PAINTBibi NafiisahNo ratings yet
- Department of Education: Instruction: Encircle The Letter of The Correct AnswerDocument10 pagesDepartment of Education: Instruction: Encircle The Letter of The Correct AnswerDeurina Burca MarquezNo ratings yet