Download as pdf or txt
You might also like
- AWS Academy Cloud Foundations Module 08 Student GuideDocument69 pagesAWS Academy Cloud Foundations Module 08 Student Guidevalz100% (2)
- Power BIDocument20 pagesPower BIRonak Rao100% (1)
- How To Code in ReactjsDocument962 pagesHow To Code in Reactjsmail temp100% (3)
- Numerical Sheet Control SystemsDocument20 pagesNumerical Sheet Control SystemsKAMARAJU SAI VAMSHINo ratings yet
- CS Dec 18Document3 pagesCS Dec 18SAURABH BHISENo ratings yet
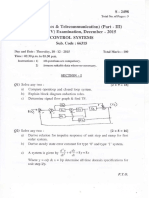
- CS Dec 15Document3 pagesCS Dec 15SAURABH BHISENo ratings yet
- 06 ESm 43 MQDocument6 pages06 ESm 43 MQGuruprasadNo ratings yet
- Ra5220205 Control SystemsDocument2 pagesRa5220205 Control SystemsSingam SridharNo ratings yet
- III B. Tech I Semester Regular/Supplementary Examinations, October/November - 2016 Control SystemsDocument8 pagesIII B. Tech I Semester Regular/Supplementary Examinations, October/November - 2016 Control SystemsPUDI HAREESHNo ratings yet
- Control Systems 6Document8 pagesControl Systems 6paramkusamNo ratings yet
- CS Previous Question PapersDocument48 pagesCS Previous Question PapersShaleva SinghNo ratings yet
- Control SystemDocument31 pagesControl SystemDeepak ThapaNo ratings yet
- T.E. (Electrical) (Semester - II) Control System - I: Time: Hours) (Max. Marks: 70 Instructions To The CandidatesDocument4 pagesT.E. (Electrical) (Semester - II) Control System - I: Time: Hours) (Max. Marks: 70 Instructions To The CandidatesShubham KaklijNo ratings yet
- Cs April 2011Document8 pagesCs April 201129viswa12No ratings yet
- 2019-May EED-321 62Document2 pages2019-May EED-321 62Aditya KapoorNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.HOD ECE KNCETNo ratings yet
- Code: 9A02503 B.Tech III Year I Semester (R09) Supplementary Examinations June 2015Document1 pageCode: 9A02503 B.Tech III Year I Semester (R09) Supplementary Examinations June 2015subbuNo ratings yet
- Code No: 35051Document8 pagesCode No: 35051SRINIVASA RAO GANTANo ratings yet
- Jntua University Previous Question Papers: Dept., of E.C.E, RCEWDocument25 pagesJntua University Previous Question Papers: Dept., of E.C.E, RCEWpala abishayNo ratings yet
- 510Document8 pages510chenumallaNo ratings yet
- RegelTechniek1 2014Document3 pagesRegelTechniek1 2014John AppleseedNo ratings yet
- APR2013P21Document63 pagesAPR2013P21qsashutoshNo ratings yet
- EC8391 - Control Systems EngineeringDocument3 pagesEC8391 - Control Systems Engineeringsyed1188No ratings yet
- rr321303 Advanced Control SystemsDocument8 pagesrr321303 Advanced Control SystemsSRINIVASA RAO GANTANo ratings yet
- CTRJun2010 (حديث)Document3 pagesCTRJun2010 (حديث)Eng M. EissaNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.VinayNo ratings yet
- Digital Control Systems May 2007 Question PaperDocument8 pagesDigital Control Systems May 2007 Question Paperelimelek100% (3)
- II B. Tech II Semester Regular Examinations, November - 2018 Control SystemsDocument2 pagesII B. Tech II Semester Regular Examinations, November - 2018 Control SystemsSubhakar DasariNo ratings yet
- Nr220405-Control SystemsDocument8 pagesNr220405-Control SystemsSRINIVASA RAO GANTANo ratings yet
- Frequency Domain SpecificationsDocument3 pagesFrequency Domain SpecificationsSriram MekhaNo ratings yet
- 4364 523 CsiiDocument4 pages4364 523 Csiiyogesh_b_kNo ratings yet
- Jntuk MT Feb 2016 - 2Document15 pagesJntuk MT Feb 2016 - 2MhappyCuNo ratings yet
- II B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Document8 pagesII B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Sandeep YandamuriNo ratings yet
- Control System Question PaperDocument2 pagesControl System Question PaperKishor GooddayNo ratings yet
- Control Systems 0 6 3 0Document4 pagesControl Systems 0 6 3 0nishnagiNo ratings yet
- Electrical Machines Controls. Ree409Document4 pagesElectrical Machines Controls. Ree409Arshad SaifiNo ratings yet
- Advanced Control Theory (Eee)Document3 pagesAdvanced Control Theory (Eee)Adarsh VkNo ratings yet
- R07 Set No. 2Document8 pagesR07 Set No. 2chenumallaNo ratings yet
- EE QuesDocument7 pagesEE Quespratikchattopadhyay2No ratings yet
- O Object, Class, Inheritance and PolymorphismDocument6 pagesO Object, Class, Inheritance and Polymorphismstephen sonNo ratings yet
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920No ratings yet
- SE 2008 Electronics E&TCDocument63 pagesSE 2008 Electronics E&TCManish kumar 50No ratings yet
- 2020 Electrical Engineering Paper-1 (PCC-EE-301) : Circuit Theory Total Marks - 70 Duration:3 HrsDocument5 pages2020 Electrical Engineering Paper-1 (PCC-EE-301) : Circuit Theory Total Marks - 70 Duration:3 HrsAmlan SarkarNo ratings yet
- (4758) - 554 T.E. (Electrical) Control System - I (2012 Course) (Semester - II) (303147) (End - Semester)Document3 pages(4758) - 554 T.E. (Electrical) Control System - I (2012 Course) (Semester - II) (303147) (End - Semester)Shubham KaklijNo ratings yet
- Papers Even2010 11 Eee8sem2011Document12 pagesPapers Even2010 11 Eee8sem2011Himanshu VohraNo ratings yet
- Sample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Document8 pagesSample Solution To Exam in MAS501 Control Systems 2 Autumn 2015Priyesh PandeyNo ratings yet
- COE-09-6th SemDocument12 pagesCOE-09-6th SemShobhit SaxenaNo ratings yet
- Practice Exam QuestionsDocument3 pagesPractice Exam QuestionsBrendanNo ratings yet
- 9A02503 Control SystemsDocument4 pages9A02503 Control SystemssivabharathamurthyNo ratings yet
- AE61Document4 pagesAE61Anima SenNo ratings yet
- March 2022Document2 pagesMarch 2022Narmada BheemaNo ratings yet
- Code - No: 45106Document2 pagesCode - No: 45106Raj SamuelNo ratings yet
- Question Paper Code:: (10×2 20 Marks)Document4 pagesQuestion Paper Code:: (10×2 20 Marks)MohamedNo ratings yet
- Q PaperDocument1 pageQ PaperniteshSFSNo ratings yet
- Control Systems Jan 2014Document2 pagesControl Systems Jan 2014Prasad C MNo ratings yet
- EC 2255 Control SystemsDocument5 pagesEC 2255 Control SystemsselvijeganNo ratings yet
- MEC E 420 Feedback Control Dynamic SystemsDocument8 pagesMEC E 420 Feedback Control Dynamic SystemscatzzruleNo ratings yet
- 21 22Document2 pages21 22Goura Sundar TripathyNo ratings yet
- Ec 308Document2 pagesEc 308satbir2008No ratings yet
- EC030 EstDocument2 pagesEC030 EstAnkush GoyalNo ratings yet
- Characteristic Modes: Theory and Applications in Antenna EngineeringFrom EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringNo ratings yet
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsFrom EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikNo ratings yet
- MPMC Nov 17Document2 pagesMPMC Nov 17SAURABH BHISENo ratings yet
- MPMC May 16Document2 pagesMPMC May 16SAURABH BHISENo ratings yet
- MPMC Nov 19Document2 pagesMPMC Nov 19SAURABH BHISENo ratings yet
- DC Dec 18Document3 pagesDC Dec 18SAURABH BHISENo ratings yet
- DC Dec 16Document2 pagesDC Dec 16SAURABH BHISENo ratings yet
- MPMC Nov 18Document2 pagesMPMC Nov 18SAURABH BHISENo ratings yet
- DC May 16Document2 pagesDC May 16SAURABH BHISENo ratings yet
- DC May 17Document2 pagesDC May 17SAURABH BHISENo ratings yet
- SS May 18Document3 pagesSS May 18SAURABH BHISENo ratings yet
- DC Dec 17Document3 pagesDC Dec 17SAURABH BHISENo ratings yet
- SS Dec 16Document4 pagesSS Dec 16SAURABH BHISENo ratings yet
- SS May 17Document3 pagesSS May 17SAURABH BHISENo ratings yet
- SS May 16Document3 pagesSS May 16SAURABH BHISENo ratings yet
- SS Dec 18Document4 pagesSS Dec 18SAURABH BHISENo ratings yet
- Pe May 18Document2 pagesPe May 18SAURABH BHISENo ratings yet
- SS Dec 17Document4 pagesSS Dec 17SAURABH BHISENo ratings yet
- Pe Dec 18Document3 pagesPe Dec 18SAURABH BHISENo ratings yet
- SS Dec 15Document4 pagesSS Dec 15SAURABH BHISENo ratings yet
- CS Dec 17Document3 pagesCS Dec 17SAURABH BHISENo ratings yet
- CS Dec 18Document3 pagesCS Dec 18SAURABH BHISENo ratings yet
- CS Dec 15Document3 pagesCS Dec 15SAURABH BHISENo ratings yet
- CS May 16Document3 pagesCS May 16SAURABH BHISENo ratings yet
- HMU8N-EMS enDocument69 pagesHMU8N-EMS enANDRES CELYNo ratings yet
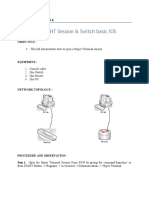
- Open A HT Session & Switch Basic IOS: Lab Experiment # 4Document10 pagesOpen A HT Session & Switch Basic IOS: Lab Experiment # 4Nafay ur RehmanNo ratings yet
- NSX-T T0 Active-Active Gateway and BGP Peering With Dell Networking ToR Switches - VxPlanetDocument23 pagesNSX-T T0 Active-Active Gateway and BGP Peering With Dell Networking ToR Switches - VxPlanetSudeep MishraNo ratings yet
- In Circuit Flash ProgrammingDocument1 pageIn Circuit Flash ProgrammingSatyanarayana Reddy KarriNo ratings yet
- Mesh Network Mgbics - 9/21/2017: Number Description Media Type Maximum Distance Connector Type ExtremeDocument2 pagesMesh Network Mgbics - 9/21/2017: Number Description Media Type Maximum Distance Connector Type ExtremeBERNARDO OVALLESNo ratings yet
- R2 10 10 Release Notes v01Document33 pagesR2 10 10 Release Notes v01Tariq MahmoodNo ratings yet
- Lecture03 Ee620 PLL SystemDocument128 pagesLecture03 Ee620 PLL SystemPeygamberinizi SikiyimNo ratings yet
- BA 315 (Prelim Review)Document4 pagesBA 315 (Prelim Review)Jaycie EscuadroNo ratings yet
- Compiler Question Paper April 2012Document3 pagesCompiler Question Paper April 2012Famida BegamNo ratings yet
- First Sessional Exam Schedule - For B Tech-2-3-4 Year 2023 - FinalDocument1 pageFirst Sessional Exam Schedule - For B Tech-2-3-4 Year 2023 - FinalrajrshipratapNo ratings yet
- Smart Solar Charge Controller ManualDocument13 pagesSmart Solar Charge Controller ManualMarkoNo ratings yet
- Robot Control With Rasberry PiDocument36 pagesRobot Control With Rasberry PiJason DavisNo ratings yet
- ANTARES Put To Light System - Nido AutomationDocument8 pagesANTARES Put To Light System - Nido AutomationNirmalya LahiriNo ratings yet
- Red Knight Bluetooth Controller ManualDocument8 pagesRed Knight Bluetooth Controller ManualSamuel ValenciaNo ratings yet
- Eset Esmc 7 Esmc Admin Enu PDFDocument352 pagesEset Esmc 7 Esmc Admin Enu PDFFahmy Rezqi PramudhitoNo ratings yet
- AbheyRana 20154015 CSE MNNIT AllahabadDocument1 pageAbheyRana 20154015 CSE MNNIT AllahabadMangesh LokhandeNo ratings yet
- Adsp 01 Introduction PDFDocument11 pagesAdsp 01 Introduction PDFvondutchlgNo ratings yet
- Brochure PaviroDocument7 pagesBrochure PaviroHussain BagasrawalaNo ratings yet
- Oose 6Document83 pagesOose 6Habtamu YihuneNo ratings yet
- Von Neumann ArchitectureDocument17 pagesVon Neumann ArchitectureLvlNo ratings yet
- Emailing DBMS - QB - Shubhammarotkar Toc NotesDocument14 pagesEmailing DBMS - QB - Shubhammarotkar Toc NotesTejas AherNo ratings yet
- CMS SecurityDocument66 pagesCMS SecurityGaurav ChhabraNo ratings yet
- WINSEM2023-24 BECE204L TH VL2023240505623 2024-01-05 Reference-Material-IIDocument64 pagesWINSEM2023-24 BECE204L TH VL2023240505623 2024-01-05 Reference-Material-IIpratyakshswamiNo ratings yet
- Final 190416 Solution PDFDocument22 pagesFinal 190416 Solution PDFYoujung KimNo ratings yet
- Scrip Ega Chanel New Version 2 Isp Game Isp KhususDocument43 pagesScrip Ega Chanel New Version 2 Isp Game Isp KhususMuhammad FhadliNo ratings yet
- Chapter 8: Network SecurityDocument13 pagesChapter 8: Network SecurityRoshan BasnetNo ratings yet
- Adaptive Cruise Control Using Model Predictive ControllerDocument3 pagesAdaptive Cruise Control Using Model Predictive ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet