Download as pdf or txt
You might also like
- OAPI DocumentationDocument14,427 pagesOAPI Documentationjulio C100% (3)
- Journal Pre-Proof: Sensors and Actuators: A. PhysicalDocument34 pagesJournal Pre-Proof: Sensors and Actuators: A. PhysicalGuadalupe Somera CisnerosNo ratings yet
- DRP10036 Screen Printed Electrodes Overview REV002Document10 pagesDRP10036 Screen Printed Electrodes Overview REV002simonNo ratings yet
- Tintas Electrodos 2Document20 pagesTintas Electrodos 2guiburNo ratings yet
- 1 s2.0 S138824811730070X MainDocument5 pages1 s2.0 S138824811730070X Mainv.babalo68No ratings yet
- 2017 Novel Concept For Fabricating A Flexible Transparent Electrode (The JOURNAL of PHYSICAL CHEMISTRY C)Document7 pages2017 Novel Concept For Fabricating A Flexible Transparent Electrode (The JOURNAL of PHYSICAL CHEMISTRY C)최요민No ratings yet
- Optimization of Copper Electroplating Process Applied For Microfabrication On Flexible Polyethylene Terephthalate SubstrateDocument7 pagesOptimization of Copper Electroplating Process Applied For Microfabrication On Flexible Polyethylene Terephthalate SubstrateXyNo ratings yet
- An Integrated Three-Electrode System With A Micromachined Liquid-Junction Ag/AgCl Reference ElectrodeDocument10 pagesAn Integrated Three-Electrode System With A Micromachined Liquid-Junction Ag/AgCl Reference ElectrodeAHMAD ANWARNo ratings yet
- Pourbaix Diagrams As A Simple Route To First PrincDocument7 pagesPourbaix Diagrams As A Simple Route To First PrincAnonymous EP0GKhfNo ratings yet
- Research Article The Influence of Blood Glucose Meter Resistance Variation On The Performance of A Biosensor With A Gold-Coated Circuit BoardDocument9 pagesResearch Article The Influence of Blood Glucose Meter Resistance Variation On The Performance of A Biosensor With A Gold-Coated Circuit Boardglucose glucoseNo ratings yet
- 2004 - Electrical Resistance Change Method For Monitoring Delaminations of CFRP Laminates Effect of Spacing Between ElectrodesDocument10 pages2004 - Electrical Resistance Change Method For Monitoring Delaminations of CFRP Laminates Effect of Spacing Between ElectrodesDavid AcostaNo ratings yet
- 1910 04801 PDFDocument42 pages1910 04801 PDFSara JaberNo ratings yet
- Electric Glass MelterDocument36 pagesElectric Glass MelterFranck DuboisNo ratings yet
- Advances in Materials Science: Experience of Using Graphitized Cored Electrodes in Industrial AC Electric Arc FurnaceDocument13 pagesAdvances in Materials Science: Experience of Using Graphitized Cored Electrodes in Industrial AC Electric Arc FurnaceAbderraouf GhrissiNo ratings yet
- Analysis of Formulas To Calculate The AC Resistance of Different Conductors'Document21 pagesAnalysis of Formulas To Calculate The AC Resistance of Different Conductors'Vlad AlexNo ratings yet
- Bilayer CVD Graphene FetsDocument4 pagesBilayer CVD Graphene FetsHOD EEENo ratings yet
- Three and Four-Electrode Electrochemical Impedance Spectroscopy Studies Using Embedded Composite Thin Film Pseudo-Reference Electrodes in Proton Exchange Membrane Fuel CellsDocument12 pagesThree and Four-Electrode Electrochemical Impedance Spectroscopy Studies Using Embedded Composite Thin Film Pseudo-Reference Electrodes in Proton Exchange Membrane Fuel CellsgpaivNo ratings yet
- 1-s2.0-S246802302200774X-mainDocument12 pages1-s2.0-S246802302200774X-mainEngr Muhammad RashidNo ratings yet
- Seggau Galler Ernst Final VersionDocument18 pagesSeggau Galler Ernst Final VersionMohamed HarisNo ratings yet
- Analysis, Design, and Optimization of Spiral Inductors and Transformers For Si RF IC'sDocument12 pagesAnalysis, Design, and Optimization of Spiral Inductors and Transformers For Si RF IC'sRF_RAJANo ratings yet
- Electrical Equivalent Circuit of Ceramic Insulators With RTV Silicone Rubber Coating and Computer Simulation of Leakage CurrentsDocument10 pagesElectrical Equivalent Circuit of Ceramic Insulators With RTV Silicone Rubber Coating and Computer Simulation of Leakage CurrentsFari PratomosiwiNo ratings yet
- Electrical and Dielectric Properties of KevlarDocument7 pagesElectrical and Dielectric Properties of KevlarJorge RomeroNo ratings yet
- Study On AC Resistance of Layering Enamelled Stranded ConductorDocument5 pagesStudy On AC Resistance of Layering Enamelled Stranded ConductorKush SharmaNo ratings yet
- Refererence Electrode AgarDocument4 pagesRefererence Electrode AgarSagir AlvaNo ratings yet
- Adsorption of Metal-Phthalocyanine Molecule On Aluminum (100) Surface: The DFT StudyDocument10 pagesAdsorption of Metal-Phthalocyanine Molecule On Aluminum (100) Surface: The DFT Studyayari samiNo ratings yet
- 2018 Dierickx ElectrochimicaActa AdvImpedanceModellingofNi 8YSZcermetAnodesDocument15 pages2018 Dierickx ElectrochimicaActa AdvImpedanceModellingofNi 8YSZcermetAnodesAndres CamposNo ratings yet
- Modeling and Simulation of A Copper Electrolysis Cell Group: Ilkka - Laitinen@tut - Fi (Ilkka Laitinen)Document9 pagesModeling and Simulation of A Copper Electrolysis Cell Group: Ilkka - Laitinen@tut - Fi (Ilkka Laitinen)Jérôme KyabuNo ratings yet
- Ichep2020 819Document6 pagesIchep2020 819Mahmoud Abd-Elhay AlthaqelNo ratings yet
- Zhang 2013Document4 pagesZhang 2013havadanaNo ratings yet
- Silicon Resistivity BehaviourDocument7 pagesSilicon Resistivity BehaviourarashmasNo ratings yet
- Aguado Measurement 1Document6 pagesAguado Measurement 1HADHI HASSAN KHANNo ratings yet
- Simulation and Analysis of EMP Transient Electromagnetic Effect of AircraftDocument4 pagesSimulation and Analysis of EMP Transient Electromagnetic Effect of Aircraftreza mirzakhaniNo ratings yet
- Choi 2015 ECS J. Solid State Sci. Technol. 4 N3084Document11 pagesChoi 2015 ECS J. Solid State Sci. Technol. 4 N3084Swan Saung TharNo ratings yet
- 2 032308jesDocument4 pages2 032308jesRoberto Domínguez RodríguezNo ratings yet
- Effects of Bonding Pressure On The Thermo-Mechanical Reliability of ACF InterconnectionDocument6 pagesEffects of Bonding Pressure On The Thermo-Mechanical Reliability of ACF Interconnection20885500No ratings yet
- Corrosion99 PDFDocument17 pagesCorrosion99 PDFreddyNo ratings yet
- Computer Simulation As An Aid To Corrosion Control and ReductionDocument17 pagesComputer Simulation As An Aid To Corrosion Control and ReductionreddyNo ratings yet
- Fabrikasi Elektroda Pembanding Ag/Agcl Dengan Berbagai MembranDocument10 pagesFabrikasi Elektroda Pembanding Ag/Agcl Dengan Berbagai MembranShintaNo ratings yet
- Bastos 2017Document18 pagesBastos 2017MikeNo ratings yet
- Electrostatic Stress Analysis of High Voltage CablesDocument4 pagesElectrostatic Stress Analysis of High Voltage CablesesatjournalsNo ratings yet
- Modelling of Track Formation - Referal To My PaperDocument5 pagesModelling of Track Formation - Referal To My PaperAli KhalilNo ratings yet
- Dierickx 2020Document13 pagesDierickx 2020Jayveer JoshiNo ratings yet
- Measurement: Marco A.A. Kappel, Ricardo Fabbri, Roberto P. Domingos, Ivan N. BastosDocument11 pagesMeasurement: Marco A.A. Kappel, Ricardo Fabbri, Roberto P. Domingos, Ivan N. BastosjpauloctsNo ratings yet
- 2023 Determining AC Polarization Conditions of Ferroelectric Materials by Dynamic Scaling Applied Physics ExpressDocument6 pages2023 Determining AC Polarization Conditions of Ferroelectric Materials by Dynamic Scaling Applied Physics ExpressAnaghaNo ratings yet
- Electrostatically Sprayed Reduced Graphene Oxide-Carbon Nanotubes Electrodes For Lithium-Ion CapacitorsDocument10 pagesElectrostatically Sprayed Reduced Graphene Oxide-Carbon Nanotubes Electrodes For Lithium-Ion CapacitorsTam Van TranNo ratings yet
- A Finite Element Simulation of The Electroplating ProcessDocument4 pagesA Finite Element Simulation of The Electroplating ProcesstonymailinatorNo ratings yet
- Simulation of Electric Arc Characteristics Based On MATLAB/SimulinkDocument7 pagesSimulation of Electric Arc Characteristics Based On MATLAB/Simulink2K19/EE/062 ASHISH KUMARNo ratings yet
- Energies 12 03075 PDFDocument14 pagesEnergies 12 03075 PDFBat-ErdeneeeeeNo ratings yet
- A Powder Metallurgy Route To Produce Ni RaneyDocument8 pagesA Powder Metallurgy Route To Produce Ni RaneyLucas Vander MeyNo ratings yet
- Crosstalk Analysis in Complex Aeronautical Bundle: Charles Jullien, Philippe Besnier Michel Dunand Isabelle JunquaDocument6 pagesCrosstalk Analysis in Complex Aeronautical Bundle: Charles Jullien, Philippe Besnier Michel Dunand Isabelle JunquaEngineerOmarNo ratings yet
- Jotun Thinner For Support StructuresDocument6 pagesJotun Thinner For Support Structuresthahir1429No ratings yet
- Electrical and Thermal Analysis of Single ConductoDocument9 pagesElectrical and Thermal Analysis of Single Conductokhanhnd.hwNo ratings yet
- Psyk 2017Document7 pagesPsyk 2017popescu roxanaNo ratings yet
- 2017 IEEE IECON Cable AmpacityDocument6 pages2017 IEEE IECON Cable AmpacityVinciushfb2No ratings yet
- Karakter Al203Document4 pagesKarakter Al203DefazaharaNo ratings yet
- Improving Power Efficiencies in Polymer-Polymer Blend PhotovoltaicsDocument9 pagesImproving Power Efficiencies in Polymer-Polymer Blend PhotovoltaicsAde Novianti Ngesti RahayuNo ratings yet
- Leakage Current Characteristics Study On Electrical Equivalent Circuit of Field-Aged RTV Silicone Rubber Coated and Noncoated Insulators in A Coastal AreaDocument5 pagesLeakage Current Characteristics Study On Electrical Equivalent Circuit of Field-Aged RTV Silicone Rubber Coated and Noncoated Insulators in A Coastal AreaKamello AssisNo ratings yet
- Fabrication of Electrical Nanocontacts To Nanometer-Sized Materials and Structures Using A Focused Ion BeamDocument6 pagesFabrication of Electrical Nanocontacts To Nanometer-Sized Materials and Structures Using A Focused Ion BeamGa LoengNo ratings yet
- The Multi-Busbar Design: An Overview: SciencedirectDocument7 pagesThe Multi-Busbar Design: An Overview: Sciencedirecthabtamu tesfayeNo ratings yet
- A Guideline For Reporting Performance Metrics With Electrochemical Capacitors: From Electrode Materials To Full DevicesDocument2 pagesA Guideline For Reporting Performance Metrics With Electrochemical Capacitors: From Electrode Materials To Full DevicesFabiana AzevedoNo ratings yet
- Impedance Spectroscopy: Theory, Experiment, and ApplicationsFrom EverandImpedance Spectroscopy: Theory, Experiment, and ApplicationsEvgenij BarsoukovNo ratings yet
- Luca Varani - University Montpellier 2 - Physics of Semiconductor Devices - Part II Material PhysicsDocument429 pagesLuca Varani - University Montpellier 2 - Physics of Semiconductor Devices - Part II Material PhysicsignaciadevotoNo ratings yet
- MicroStep Driver DQ860MADocument1 pageMicroStep Driver DQ860MAignaciadevotoNo ratings yet
- PVP35kW and PVP50kW: Three-Phase Inverter Solutions For Small Commercial ProjectsDocument2 pagesPVP35kW and PVP50kW: Three-Phase Inverter Solutions For Small Commercial ProjectsignaciadevotoNo ratings yet
- Hydrogenated Amorphous Silicon Cambridge Solid State Science Series PDFDocument432 pagesHydrogenated Amorphous Silicon Cambridge Solid State Science Series PDFignaciadevotoNo ratings yet
- Figuras Geométricas Online PDF Exercise - Live WorksheetsDocument3 pagesFiguras Geométricas Online PDF Exercise - Live WorksheetsLuis Angel OlveraNo ratings yet
- Talent Develoment Program 9 2019 - Transafe Dharma PersadaDocument2 pagesTalent Develoment Program 9 2019 - Transafe Dharma PersadaLuki TransafeNo ratings yet
- Calendar Allocation For 2019 FFWSDDocument1 pageCalendar Allocation For 2019 FFWSDJansen BenavidezNo ratings yet
- LTE DT ParametersDocument19 pagesLTE DT ParametersDhyanendra SinghNo ratings yet
- Computer Science Project Report: (PYTHON AND MYSQL Connectivity) Bank Management SystemDocument22 pagesComputer Science Project Report: (PYTHON AND MYSQL Connectivity) Bank Management SystemmanyaaroraNo ratings yet
- Delay Tolerant Networks Protocols and Applications - Vasilakos & OthersDocument332 pagesDelay Tolerant Networks Protocols and Applications - Vasilakos & OthersjetxoNo ratings yet
- Virtualization-Report For SeminarDocument6 pagesVirtualization-Report For SeminarcharnakshjainNo ratings yet
- SM043-001 Manual de Servicio Postratamiento KWDocument70 pagesSM043-001 Manual de Servicio Postratamiento KWmarco arias100% (2)
- Airline Documentation FinalDocument86 pagesAirline Documentation FinalSuman RijalNo ratings yet
- M. Tech. CAD-CAMDocument31 pagesM. Tech. CAD-CAMHarshalNo ratings yet
- Ausa Mixers 500RX-X1100RH-ENG PDFDocument2 pagesAusa Mixers 500RX-X1100RH-ENG PDFAsad AijazNo ratings yet
- TL-WN721N - TL-WN722N User Guide PDFDocument43 pagesTL-WN721N - TL-WN722N User Guide PDFsulavojhaNo ratings yet
- Photo Math PolicyDocument36 pagesPhoto Math PolicyRose Ann MalinaoNo ratings yet
- The Strategic Role of Engineering Asset ManagementDocument25 pagesThe Strategic Role of Engineering Asset ManagementesutjiadiNo ratings yet
- WXN Xxxx+Timecard+Tls+2013!02!23 1Document5 pagesWXN Xxxx+Timecard+Tls+2013!02!23 1nate_morris_weaxonNo ratings yet
- Nuclear SSTODocument15 pagesNuclear SSTOskirtyNo ratings yet
- List of Instruments and Pressure GaugesDocument1 pageList of Instruments and Pressure Gaugesram dhukeNo ratings yet
- 2018 Book IntelligentHumanSystemsIntegraDocument791 pages2018 Book IntelligentHumanSystemsIntegrakaliosNo ratings yet
- Appletalk SeminarDocument20 pagesAppletalk Seminarspt115050% (2)
- KN-1611 Stable 3.08.C.2.0-0 Router Startup-ConfigDocument6 pagesKN-1611 Stable 3.08.C.2.0-0 Router Startup-ConfigIgor LeeNo ratings yet
- 793d-Fdb Hose GuideDocument117 pages793d-Fdb Hose Guideronys caballeroNo ratings yet
- NuFlo. MC-II. Plus EXP Flow AnalyzerDocument2 pagesNuFlo. MC-II. Plus EXP Flow AnalyzerFouad MenidjelNo ratings yet
- Assignment3 V1.1Document8 pagesAssignment3 V1.1Maryam ZulfiqarNo ratings yet
- Omegas Prezentacija 01Document20 pagesOmegas Prezentacija 01Predrag Djordjevic100% (1)
- VCET 12 PRJ02 Student ProjectPlanDocument2 pagesVCET 12 PRJ02 Student ProjectPlanshodhanNo ratings yet
- 8th Sem Syllabus VTU MECHANICALDocument38 pages8th Sem Syllabus VTU MECHANICALYashasNo ratings yet
- Update FW Zfs7000Document8 pagesUpdate FW Zfs7000So HuyNo ratings yet
- Configure VTP Server and Client in SwitchDocument4 pagesConfigure VTP Server and Client in SwitchPerbz JayNo ratings yet
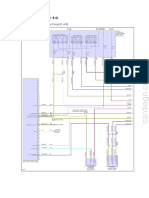
- 6.4L, Engine Performance CircuitDocument6 pages6.4L, Engine Performance CircuitAliNo ratings yet