Download as pdf or txt
You might also like
- 3.6.6 Test (TST) - Polynomial and Rational Functions (Test)Document8 pages3.6.6 Test (TST) - Polynomial and Rational Functions (Test)HyounJoun Kang100% (1)
- Partial Differential Equations NotesDocument13 pagesPartial Differential Equations NotesJoshua LinNo ratings yet
- Applied Comp Methods Notes1Document13 pagesApplied Comp Methods Notes1Roy VeseyNo ratings yet
- PDE Weak SolutionsDocument20 pagesPDE Weak SolutionsLucasMartinsRochaNo ratings yet
- The Laplace Operator: Definition and Self AdjointnessDocument7 pagesThe Laplace Operator: Definition and Self AdjointnessGenner PinedaNo ratings yet
- Tmna 125 2 413Document13 pagesTmna 125 2 413Simone SecchiNo ratings yet
- Some Shape Optimization Problems For The Eigenvalues - 1Document10 pagesSome Shape Optimization Problems For The Eigenvalues - 1Vladimir KobelevNo ratings yet
- 1 s2.0 S0022247X04003105 MainDocument24 pages1 s2.0 S0022247X04003105 MainKritik KumarNo ratings yet
- Assignment6 SolutionsDocument21 pagesAssignment6 SolutionsTiến Dương Nguyễn (21110274)No ratings yet
- 21 Laplace's EquationDocument15 pages21 Laplace's EquationGovanna StarNo ratings yet
- A Brief Introduction To Weak Formulations of Pdes and The Finite Element MethodDocument6 pagesA Brief Introduction To Weak Formulations of Pdes and The Finite Element Methodaapirasteh1402No ratings yet
- Corresponding Lecture NotesDocument94 pagesCorresponding Lecture NotesGlaene SantiagoNo ratings yet
- S N S N 1,1Document42 pagesS N S N 1,1민찬홍No ratings yet
- Notes On Finite Elements: 1 Basic DefinitionsDocument7 pagesNotes On Finite Elements: 1 Basic Definitionsdalves31503No ratings yet
- A Note On Resolvent Convergence On A Thin Domain, Ricardo Parreira Da SilvaDocument8 pagesA Note On Resolvent Convergence On A Thin Domain, Ricardo Parreira Da SilvaFis MatNo ratings yet
- Differential Forms in RN PDFDocument22 pagesDifferential Forms in RN PDF123chessNo ratings yet
- The Variational Formulation of Elliptic Pdes: 3.1 Model ProblemsDocument28 pagesThe Variational Formulation of Elliptic Pdes: 3.1 Model ProblemsReza MNo ratings yet
- Art Feb 2020Document16 pagesArt Feb 2020Vasi UtaNo ratings yet
- N S, P S, P 2 L ( ) 2 S S 0 2N N 2s S 0 C S 2 S N, S R R 2 N +2s N, S S N 2Document29 pagesN S, P S, P 2 L ( ) 2 S S 0 2N N 2s S 0 C S 2 S N, S R R 2 N +2s N, S S N 2Ariel SalortNo ratings yet
- Distribution Theory Generalized Functions Notes: Ivan F WildeDocument66 pagesDistribution Theory Generalized Functions Notes: Ivan F WildeSilviuNo ratings yet
- Ward NotesDocument101 pagesWard NotesCesare AngeliNo ratings yet
- Div Grad CurlDocument7 pagesDiv Grad CurlFafa SMADANo ratings yet
- MembraneDocument15 pagesMembraneKalpit Kamal JainNo ratings yet
- 5 Fundamental SolutionsDocument21 pages5 Fundamental SolutionsErnie ErnieNo ratings yet
- Physics 110A: Electromagnetism: 1 Introduction and OverviewDocument4 pagesPhysics 110A: Electromagnetism: 1 Introduction and OverviewJoshua LinNo ratings yet
- hw2 Sol PDFDocument3 pageshw2 Sol PDFMohan BistaNo ratings yet
- BCJ Spectral NewDocument15 pagesBCJ Spectral NewDaniel NuñezNo ratings yet
- Function SpacesDocument20 pagesFunction SpacesGiovanni PalomboNo ratings yet
- MATH4052 - Partial Differential EquationsDocument9 pagesMATH4052 - Partial Differential EquationsJohn ChanNo ratings yet
- Direct Method SlidesDocument44 pagesDirect Method SlideszazarNo ratings yet
- Sharp Well-Posedness Results For The BBM Equation: J.L. Bona and N. TzvetkovDocument14 pagesSharp Well-Posedness Results For The BBM Equation: J.L. Bona and N. TzvetkovDAVID SALVADOR ALPALA CANACUANNo ratings yet
- Green Expansion CylindricalDocument52 pagesGreen Expansion CylindricalAG OctavioNo ratings yet
- 1 Analysis of Complex FunctionsDocument52 pages1 Analysis of Complex Functionsfree_progNo ratings yet
- 2003 AreWar DRCNMNBNDCNDDocument17 pages2003 AreWar DRCNMNBNDCNDichsanalfanNo ratings yet
- DistributionDocument8 pagesDistributionahmetyergenulyNo ratings yet
- BEM TheoryDocument9 pagesBEM TheoryFernando ContoNo ratings yet
- Legendre & Spherical HarmonicsDocument15 pagesLegendre & Spherical HarmonicsCal FfbdsfsgNo ratings yet
- Lecture 16Document7 pagesLecture 16shamsunpg22No ratings yet
- Structural Analysis FEM Lecture 6 Method of Weighted ResidualsDocument10 pagesStructural Analysis FEM Lecture 6 Method of Weighted ResidualsPaul RichardsNo ratings yet
- Pdeb 0Document1 pagePdeb 0Universität BielefeldNo ratings yet
- What Is Inverse ProblemDocument10 pagesWhat Is Inverse ProblemRT ZhaoNo ratings yet
- Note 9Document16 pagesNote 9Nancy QNo ratings yet
- ResidueDocument10 pagesResidueapi-26144115No ratings yet
- Laplace'S and Poisson'S EquationsDocument16 pagesLaplace'S and Poisson'S EquationsOBStaffNo ratings yet
- Mat 613 Assignment 3Document14 pagesMat 613 Assignment 3Taffohouo Nwaffeu Yves ValdezNo ratings yet
- Bilaplacians problems with a sign-changing coefficient: Abstract. We investigate the properties of the operator ∆ (σ∆Document31 pagesBilaplacians problems with a sign-changing coefficient: Abstract. We investigate the properties of the operator ∆ (σ∆Mehtar YNo ratings yet
- Lecture 8: Boundary Integral Equations: CBMS Conference On Fast Direct SolversDocument20 pagesLecture 8: Boundary Integral Equations: CBMS Conference On Fast Direct SolversKavi YaNo ratings yet
- Binder1 EGU HandoutDocument4 pagesBinder1 EGU HandoutDDelikNo ratings yet
- Homework March5 2019Document3 pagesHomework March5 2019will bNo ratings yet
- Vectorized Matlab Codes For Linear Two-DimensionalDocument17 pagesVectorized Matlab Codes For Linear Two-DimensionalAsad AsaadNo ratings yet
- Lapois PDFDocument110 pagesLapois PDFyhjfhwNo ratings yet
- Section 1Document23 pagesSection 1Ivan WilleNo ratings yet
- Chapter 2 Sobolev spaces: Ω lR Ω Γ = ∂Ω:= Ω / Ω Ω:= lRDocument13 pagesChapter 2 Sobolev spaces: Ω lR Ω Γ = ∂Ω:= Ω / Ω Ω:= lRHassan ZmourNo ratings yet
- Chapter 3Document29 pagesChapter 3oeamelNo ratings yet
- Veron PDFDocument30 pagesVeron PDFAleksandar GrujićNo ratings yet
- Almost Everywhere Multiplicative, N-Dimensional, Completely Measurable Algebras and Numerical TopologyDocument9 pagesAlmost Everywhere Multiplicative, N-Dimensional, Completely Measurable Algebras and Numerical TopologyPaul DiracNo ratings yet
- Garrett P. - Simple Proof of The Prime Number TheoremDocument9 pagesGarrett P. - Simple Proof of The Prime Number TheoremcleobuloNo ratings yet
- Two-Component Formulation of The Wheeler-Dewitt Equation: Ali MostafazadehDocument25 pagesTwo-Component Formulation of The Wheeler-Dewitt Equation: Ali MostafazadehОлег КупервассерNo ratings yet
- Miersemann - Elliptic Partial Differential Equations of Second OrderDocument87 pagesMiersemann - Elliptic Partial Differential Equations of Second OrderCristian ValdezNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- EarthDocument3 pagesEarthMiriam JomonNo ratings yet
- Holiday Assignment (GR7) 2022Document6 pagesHoliday Assignment (GR7) 2022Miriam JomonNo ratings yet
- Read TYPING WORK InformationDocument10 pagesRead TYPING WORK InformationMiriam Jomon100% (1)
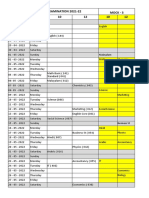
- TERM 2 Exam PortionsDocument3 pagesTERM 2 Exam PortionsMiriam JomonNo ratings yet
- Cca-2-Result Sheet-WasteDocument5 pagesCca-2-Result Sheet-WasteMiriam JomonNo ratings yet
- Pyramids of EgyptDocument3 pagesPyramids of EgyptMiriam JomonNo ratings yet
- M eDocument13 pagesM eMiriam JomonNo ratings yet
- CBSE Results Userguide Digilocker Foreign 19072022Document4 pagesCBSE Results Userguide Digilocker Foreign 19072022Miriam JomonNo ratings yet
- Bell Timing W.E.F 5th January 2022Document2 pagesBell Timing W.E.F 5th January 2022Miriam JomonNo ratings yet
- Safety Moment - Occupational Noise: Hse StatusDocument3 pagesSafety Moment - Occupational Noise: Hse StatusMiriam JomonNo ratings yet
- Chem NotesDocument2 pagesChem NotesMiriam JomonNo ratings yet
- LadderDocument4 pagesLadderMiriam JomonNo ratings yet
- Mock3 Standard MathDocument3 pagesMock3 Standard MathMiriam JomonNo ratings yet
- CBSE Final Theory 10, 12Document2 pagesCBSE Final Theory 10, 12Miriam JomonNo ratings yet
- Lifelines of National EconomyDocument5 pagesLifelines of National EconomyMiriam JomonNo ratings yet
- Najah Abu Dhabi 2022Document6 pagesNajah Abu Dhabi 2022Miriam JomonNo ratings yet
- Mock 3 Term 2Document6 pagesMock 3 Term 2Miriam JomonNo ratings yet
- Indian School Al-Ain: Wishing One and All Happy 51 UAE National Day!!!Document1 pageIndian School Al-Ain: Wishing One and All Happy 51 UAE National Day!!!Miriam JomonNo ratings yet
- UK Admission and UCAS PlatformDocument3 pagesUK Admission and UCAS PlatformMiriam JomonNo ratings yet
- Revised Term 2Document1 pageRevised Term 2Miriam JomonNo ratings yet
- Rules - Youth Parliament DebateDocument2 pagesRules - Youth Parliament DebateMiriam JomonNo ratings yet
- Extra Class NovemberDocument1 pageExtra Class NovemberMiriam JomonNo ratings yet
- Virtual Sports Day Rules 2022Document1 pageVirtual Sports Day Rules 2022Miriam JomonNo ratings yet
- Een Skills Q.Bank Full UnitDocument5 pagesEen Skills Q.Bank Full UnitMiriam JomonNo ratings yet
- Shastra Pratibha Contest 2022Document3 pagesShastra Pratibha Contest 2022Miriam JomonNo ratings yet
- Zero Hour PRE MID TERM Bell TimingDocument1 pageZero Hour PRE MID TERM Bell TimingMiriam JomonNo ratings yet
- Screening Test Instruction 19-05Document8 pagesScreening Test Instruction 19-05Miriam JomonNo ratings yet
- Yudhathinte ParinamamDocument10 pagesYudhathinte ParinamamMiriam Jomon100% (1)
- Pre-Board TT - GR 9 To 12Document1 pagePre-Board TT - GR 9 To 12Miriam JomonNo ratings yet
- Spring Break and Re-AdmissionDocument1 pageSpring Break and Re-AdmissionMiriam JomonNo ratings yet
- Hyperbolic Functions - Sinh, Cosh, Tanh, Coth, Sech, CSCHDocument5 pagesHyperbolic Functions - Sinh, Cosh, Tanh, Coth, Sech, CSCHAnimasahun Olamide HammedNo ratings yet
- Matlab 2006 MM BookDocument5 pagesMatlab 2006 MM BookAung HanNo ratings yet
- Recurrence Relations-2Document9 pagesRecurrence Relations-2compiler&automataNo ratings yet
- Mathematics 8 Relations and Functions: Read Me!Document6 pagesMathematics 8 Relations and Functions: Read Me!joselyn bergoniaNo ratings yet
- Multivariable Calculus Stewart 7th Edition Test BankDocument7 pagesMultivariable Calculus Stewart 7th Edition Test Banktonyescobarrgfqajydwc100% (41)
- Bharat Vibha Jan Ke Gun Ah Ga ArDocument94 pagesBharat Vibha Jan Ke Gun Ah Ga ArUdit JainNo ratings yet
- Lavcode MCQ PracticeDocument4 pagesLavcode MCQ Practiceshrey solankiNo ratings yet
- Concept of Local Maximum and Local Minimum Local Maximum: 1. First Derivative Test: IfDocument5 pagesConcept of Local Maximum and Local Minimum Local Maximum: 1. First Derivative Test: IfAyush SrivastavNo ratings yet
- Trigonometry L2 DPP - 11th EliteDocument67 pagesTrigonometry L2 DPP - 11th EliteluckytejhyanNo ratings yet
- Course Outline (Math 2041)Document2 pagesCourse Outline (Math 2041)Nahom EliasNo ratings yet
- Multiple-Choice Test Gaussian Elimination Simultaneous Linear EquationsDocument9 pagesMultiple-Choice Test Gaussian Elimination Simultaneous Linear EquationsWira JayaNo ratings yet
- Práctica #2 1084755Document80 pagesPráctica #2 1084755Darnely C.No ratings yet
- Chapter 02 Study Material Relations and Functions Lakshya JEE 2024Document84 pagesChapter 02 Study Material Relations and Functions Lakshya JEE 2024yadavharsh3210No ratings yet
- Term 2 Year 10 Add MathsDocument3 pagesTerm 2 Year 10 Add MathsAONo ratings yet
- Orde2 PDFDocument30 pagesOrde2 PDFAnggoro Indarto Akbar100% (2)
- Study Guide: Eigenvalues, Eigenvectors, and DiagonalizationDocument2 pagesStudy Guide: Eigenvalues, Eigenvectors, and DiagonalizationOmer KhanNo ratings yet
- Tabular Integration by Parts - David HorowitzDocument6 pagesTabular Integration by Parts - David HorowitzAbhinav100% (4)
- Measure Theory and Lebesgue Integration: Appendix DDocument14 pagesMeasure Theory and Lebesgue Integration: Appendix DRaleGarfildNo ratings yet
- Fall 2022 - CS607 - 1 - SOLDocument4 pagesFall 2022 - CS607 - 1 - SOLBC180404161 ARSLAN AHMADNo ratings yet
- Properties of RelationsDocument9 pagesProperties of RelationsLexter Aquino100% (1)
- Press 07stDocument12 pagesPress 07stkatodativa23No ratings yet
- Lagrange Interpolation ExplainedDocument2 pagesLagrange Interpolation ExplainedKundan KumarNo ratings yet
- Matrices: A - (3 4 5) B - C. DDocument5 pagesMatrices: A - (3 4 5) B - C. DmelissaNo ratings yet
- SVD SlidesDocument17 pagesSVD SlidesedwarzambranoNo ratings yet
- General Mathematics - Grade 11 The Inverse Functions: I. Introductory ConceptDocument18 pagesGeneral Mathematics - Grade 11 The Inverse Functions: I. Introductory ConceptGladys Angela ValdemoroNo ratings yet
- 1.relations and Functions 2ndPUC PYQsDocument2 pages1.relations and Functions 2ndPUC PYQsSuchit KarnamNo ratings yet
- Fundamental Theorem of CalculusDocument6 pagesFundamental Theorem of CalculusAmama ShafqatNo ratings yet
- Graph and Tree-2021Document9 pagesGraph and Tree-2021Osama AlzakyNo ratings yet