Download as pdf or txt
You might also like
- BMC Control-M 7: A Journey from Traditional Batch Scheduling to Workload AutomationFrom EverandBMC Control-M 7: A Journey from Traditional Batch Scheduling to Workload AutomationNo ratings yet
- 4 ProgrammingParadigmsDocument48 pages4 ProgrammingParadigmsThanh Võ Thị HoàiNo ratings yet
- Lec 01Document18 pagesLec 01Moneeb AsifNo ratings yet
- Introduction To Real-Time Systems: Peter PuschnerDocument19 pagesIntroduction To Real-Time Systems: Peter PuschnerMohamed ShabanNo ratings yet
- Real-Time Systems: Frank DrewsDocument30 pagesReal-Time Systems: Frank DrewsShresth KumarNo ratings yet
- IntroductionDocument21 pagesIntroductionroshanzamirdonya81No ratings yet
- Real-Time SystemsDocument29 pagesReal-Time Systemshowida nafaaNo ratings yet
- 19 RealTime SynchronizationDocument27 pages19 RealTime Synchronizationapi-3726520No ratings yet
- Real Time Embedded - SystemDocument15 pagesReal Time Embedded - SystemAndrei MocanuNo ratings yet
- Intro Realtime Chapter1Document77 pagesIntro Realtime Chapter1gurudatt_kulkarniNo ratings yet
- Introduction To Real-Time SystemsDocument13 pagesIntroduction To Real-Time SystemsHuma Qayyum MohyudDinNo ratings yet
- EE514 - Real-Time ComputingDocument48 pagesEE514 - Real-Time ComputingdebealNo ratings yet
- Lecture 04: Realtime Operating Systems (Rtos)Document57 pagesLecture 04: Realtime Operating Systems (Rtos)MulugetaNo ratings yet
- Real Time Opearting SystemDocument32 pagesReal Time Opearting SystemTech_MXNo ratings yet
- Crash Course On Control: Karl-Erik ÅrzénDocument113 pagesCrash Course On Control: Karl-Erik ÅrzénswatkoolNo ratings yet
- ES II AssignmentDocument10 pagesES II AssignmentRahul MandaogadeNo ratings yet
- Final RtosDocument52 pagesFinal RtosDaksh BothraNo ratings yet
- Module3 Qing LiDocument99 pagesModule3 Qing Lijezil3308No ratings yet
- Real-Time Operating Systems RTOSDocument38 pagesReal-Time Operating Systems RTOSአምላኬ አባቴNo ratings yet
- Real Time Operating SystemsDocument35 pagesReal Time Operating SystemsNeerajBooraNo ratings yet
- Rtos PDFDocument46 pagesRtos PDFyogendra.shethNo ratings yet
- RTES Lecture09Document27 pagesRTES Lecture09adeel akramNo ratings yet
- Inroduction To Real Time SystemsDocument27 pagesInroduction To Real Time SystemsRajini GuttiNo ratings yet
- Introduction To Real-Time Operating Systems (RTOS) and Scheduling AlgorithmsDocument35 pagesIntroduction To Real-Time Operating Systems (RTOS) and Scheduling AlgorithmsPriyanka RauthanNo ratings yet
- Real-Time Systems: Frank DrewsDocument30 pagesReal-Time Systems: Frank DrewsJuan Jose MachadoNo ratings yet
- Unit 2Document23 pagesUnit 2PRADEEP KOPPARTHINo ratings yet
- Submitted by P. Manojkumar Ii D.C.E Sri Durga Devi Polytechnic College ChennaiDocument15 pagesSubmitted by P. Manojkumar Ii D.C.E Sri Durga Devi Polytechnic College ChennaiSujit KumarNo ratings yet
- New Trends in Real Time Operating Systems: Ms. Shraddha S. Nakate, Dr. Bandu. B. MeshramDocument10 pagesNew Trends in Real Time Operating Systems: Ms. Shraddha S. Nakate, Dr. Bandu. B. MeshramconnectvprakashNo ratings yet
- Scheduling & Data Communication and Networking.: Platform TechnologiesDocument28 pagesScheduling & Data Communication and Networking.: Platform TechnologiesLouie AbbIeNo ratings yet
- Technical Question Bank Operating SystemsDocument17 pagesTechnical Question Bank Operating SystemsShail SinghNo ratings yet
- Unit 3 and Unit 4Document105 pagesUnit 3 and Unit 4kalekarmohith02No ratings yet
- Introduction To Real-Time Operating SystemsDocument36 pagesIntroduction To Real-Time Operating SystemsMohanNo ratings yet
- 5 OperatingSystemDocument41 pages5 OperatingSystemThanh Võ Thị HoàiNo ratings yet
- SIRTOS A Simple Real Time Operating SystemDocument6 pagesSIRTOS A Simple Real Time Operating Systemmiguel angelNo ratings yet
- CH 1Document60 pagesCH 1gcrossnNo ratings yet
- Topics of DiscussionDocument22 pagesTopics of DiscussionAditya MhaisaleNo ratings yet
- Real Time Operating SystemDocument5 pagesReal Time Operating SystemChethan JayasimhaNo ratings yet
- RTOS Slides UCOS IIDocument139 pagesRTOS Slides UCOS IIgrhvg_mct8224No ratings yet
- RTDBDocument47 pagesRTDBnikhat khanNo ratings yet
- Realtime Operating SystemsDocument29 pagesRealtime Operating SystemskesisdrderejeshNo ratings yet
- CO4 CHAP 9 - (13-24) - PracticeDocument28 pagesCO4 CHAP 9 - (13-24) - PracticeSoumyajit HazraNo ratings yet
- SAD Unit 4 Real Time Systems1Document20 pagesSAD Unit 4 Real Time Systems1onesnoneNo ratings yet
- Rtos-Real-time Operating Systems: EchaloneDocument39 pagesRtos-Real-time Operating Systems: EchaloneTobe EziashiNo ratings yet
- RTOS SchedulingDocument21 pagesRTOS SchedulingratnadeepbimtacNo ratings yet
- Introduction To Real Time Operating SystemsDocument36 pagesIntroduction To Real Time Operating SystemsKeertanaNo ratings yet
- Fundamentals of Computer Design - 1Document32 pagesFundamentals of Computer Design - 1qwety300No ratings yet
- Seminar On-: Real Time Scheduling Policy For Embedded System DomainDocument25 pagesSeminar On-: Real Time Scheduling Policy For Embedded System Domainvinod kapateNo ratings yet
- 18CSC205J-Operating Systems: Unit-IDocument95 pages18CSC205J-Operating Systems: Unit-IKartik DwivediNo ratings yet
- ScheduledDocument33 pagesScheduledse180126chuphucminhvuongNo ratings yet
- 20-Distributed Architecture and Features-28!02!2024Document24 pages20-Distributed Architecture and Features-28!02!2024cybersyndicatenftNo ratings yet
- Rtos by MM 2Document6 pagesRtos by MM 2natnael demissieNo ratings yet
- Dcs Training-BasicDocument96 pagesDcs Training-BasicPuneet Bachal100% (2)
- Taking The Guesswork Out of TimingDocument4 pagesTaking The Guesswork Out of TimingXMOSNo ratings yet
- RtEmbSysSurvey StankovicDocument4 pagesRtEmbSysSurvey Stankovicashutoshupadhyay849No ratings yet
- Embedded System Design: Narina Thakur Bharti Vidyapeeth's College of Engineering Dept of Computer ScienceDocument45 pagesEmbedded System Design: Narina Thakur Bharti Vidyapeeth's College of Engineering Dept of Computer Sciencekartika_krazeNo ratings yet
- AnsDocument2 pagesAnsTHAKKAR NARAYAN JAISUKHLALNo ratings yet
- Advanced Penetration Testing for Highly-Secured Environments - Second EditionFrom EverandAdvanced Penetration Testing for Highly-Secured Environments - Second EditionNo ratings yet
- Practical Data Acquisition for Instrumentation and Control SystemsFrom EverandPractical Data Acquisition for Instrumentation and Control SystemsNo ratings yet
- WBDesign 42Document7 pagesWBDesign 42Hải TrầnNo ratings yet
- PaperNazrul IJECE Forest2022 Published PDFDocument9 pagesPaperNazrul IJECE Forest2022 Published PDFHải TrầnNo ratings yet
- bq25895 DatasheetDocument65 pagesbq25895 DatasheetHải TrầnNo ratings yet
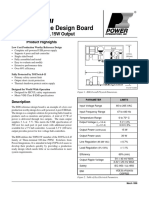
- Usb Reference Design Board: Topswitch-IiDocument12 pagesUsb Reference Design Board: Topswitch-IiHải TrầnNo ratings yet
- 10 ProgrammingParadigmsDocument48 pages10 ProgrammingParadigmsHải TrầnNo ratings yet
- Pont Eres1 2014Document399 pagesPont Eres1 2014Chamuko CanijoNo ratings yet
- Using Dynamic Partial Reconfiguration of FPGAs I - 2018 - Microprocessors and MiDocument9 pagesUsing Dynamic Partial Reconfiguration of FPGAs I - 2018 - Microprocessors and MiMedina PabloNo ratings yet
- Handbook of Real Time and Embedded SystemsDocument9 pagesHandbook of Real Time and Embedded SystemsUmair Mujtaba QureshiNo ratings yet
- Files - MC-WP-012 5 Key Factors To Consider When Selecting An Embedded Testing Tool - 5Document22 pagesFiles - MC-WP-012 5 Key Factors To Consider When Selecting An Embedded Testing Tool - 5Rafael R QueirozNo ratings yet
- Cyber Physical SystemsDocument7 pagesCyber Physical SystemsMalik AzeemNo ratings yet
- Exam 020314Document3 pagesExam 020314erica jayasunderaNo ratings yet
- 1.6366!ECTS - 10-11 - Period 3 Och 4Document17 pages1.6366!ECTS - 10-11 - Period 3 Och 4emilio_serrano_7No ratings yet
- Al04 11 PDFDocument10 pagesAl04 11 PDFsenol isciNo ratings yet
- 03-77 Cots RtosDocument58 pages03-77 Cots RtosFairoza NaushadNo ratings yet
- (Series in Computer Science (New York, N.Y.) ) Giorgio C. Buttazzo - Soft Real-Time Systems - Predictability vs. Efficiency (2005, Springer)Document280 pages(Series in Computer Science (New York, N.Y.) ) Giorgio C. Buttazzo - Soft Real-Time Systems - Predictability vs. Efficiency (2005, Springer)SrikanthNo ratings yet
- Introduction To Embedded Systems: Edward A. Lee and Prabal DuttaDocument29 pagesIntroduction To Embedded Systems: Edward A. Lee and Prabal Duttaهداية مسلمةNo ratings yet
- A Study On Dynamic Memory Allocation Mechanisms For Small Block Sizes in Real-Time Embedded SystemsDocument67 pagesA Study On Dynamic Memory Allocation Mechanisms For Small Block Sizes in Real-Time Embedded SystemsdroidNo ratings yet
- Factsheet Ait Tricore WebDocument3 pagesFactsheet Ait Tricore Webrajrdy4No ratings yet
- Industrial Visit ReportDocument94 pagesIndustrial Visit ReportGalih PutraNo ratings yet
- Operating System Noise in The Linux KernelDocument12 pagesOperating System Noise in The Linux KernelAman PrasadNo ratings yet
- Real-Time Performance of Dynamic Memory Allocation AlgorithmsDocument10 pagesReal-Time Performance of Dynamic Memory Allocation AlgorithmsJNarigonNo ratings yet
- Simso: A Simulation Tool To Evaluate Real-Time Multiprocessor Scheduling AlgorithmsDocument7 pagesSimso: A Simulation Tool To Evaluate Real-Time Multiprocessor Scheduling AlgorithmssliNo ratings yet
- A Survey of Recent Developments in Testability Safety and Security of RISC-V ProcessorsDocument10 pagesA Survey of Recent Developments in Testability Safety and Security of RISC-V ProcessorsShrinidhi RaoNo ratings yet
- Timeweaver: A Tool For Hybrid Worst-Case Execution Time AnalysisDocument11 pagesTimeweaver: A Tool For Hybrid Worst-Case Execution Time AnalysisNico PopNo ratings yet
- Question BankDocument35 pagesQuestion BankJohnNo ratings yet
- Embedded System Architecture by Ralf NiemannDocument130 pagesEmbedded System Architecture by Ralf Niemannloffycraze100% (2)
- Lecture - 07 - Embedded Systems Software IntroductionDocument25 pagesLecture - 07 - Embedded Systems Software IntroductionTú Phạm AnhNo ratings yet
- Reverse Engineering Recent Advances and Applications PDFDocument292 pagesReverse Engineering Recent Advances and Applications PDFBalmore PalaciosNo ratings yet
- Sandwich DelayDocument13 pagesSandwich DelayTommy TèoNo ratings yet
- Timing Protection in AUTOSAR ISO 26262Document10 pagesTiming Protection in AUTOSAR ISO 26262Joseph KymmNo ratings yet
- 3-1 Detection and Recognition of Objects in Real Time Using An Intelligent Camera by A Delta RobotDocument26 pages3-1 Detection and Recognition of Objects in Real Time Using An Intelligent Camera by A Delta Robotblerta.hajdiniNo ratings yet
- Synchronous Programming SeminarDocument27 pagesSynchronous Programming SeminarJulio Cesar VPNo ratings yet
- System-Level Power-Aware Design Techniques in Real-Time SystemsDocument15 pagesSystem-Level Power-Aware Design Techniques in Real-Time SystemsHans ThomasNo ratings yet
- Safety Manual CBD2201288 D01Document147 pagesSafety Manual CBD2201288 D01adityasingh121099No ratings yet