Download as pdf or txt
You might also like
- B20DTH InstructionDocument3 pagesB20DTH InstructionАндрей Сидляров100% (1)
- Datasheet Cube1-OutdoorDocument2 pagesDatasheet Cube1-OutdoortvngzrcxtrNo ratings yet
- LV MaxSonar EZ1 DatasheetDocument2 pagesLV MaxSonar EZ1 DatasheetSuLi Warraich100% (1)
- LV MaxSonar EZ0 DatasheetDocument2 pagesLV MaxSonar EZ0 DatasheetJoo Jub100% (2)
- LV MaxSonar EZ4 DatasheetDocument2 pagesLV MaxSonar EZ4 Datasheetradiatar_M100% (2)
- Ultrasonic Range Finder PDFDocument2 pagesUltrasonic Range Finder PDFFikri SeptianNo ratings yet
- Ultrasonic SensorDocument1 pageUltrasonic SensoralpeshNo ratings yet
- CEM ClampOnDocument44 pagesCEM ClampOnGuri666No ratings yet
- Focus On ImagingDocument6 pagesFocus On ImagingPronoy BiswasNo ratings yet
- Oscilloscope Probes and AccessoriesDocument20 pagesOscilloscope Probes and Accessoriesarness22No ratings yet
- Dat Easyloc en 151120Document3 pagesDat Easyloc en 151120Constantyn_FrederikNo ratings yet
- Lv-Maxsonar - Ez™ Series: High Performance Sonar Range FinderDocument11 pagesLv-Maxsonar - Ez™ Series: High Performance Sonar Range FinderBubaka Abu Naufal100% (2)
- New Marking Laser L-Box - Sic MarkingDocument2 pagesNew Marking Laser L-Box - Sic MarkingandreNo ratings yet
- LV MaxSonar EZ DatasheetDocument12 pagesLV MaxSonar EZ DatasheetOscar Maldonado100% (3)
- MA Series Rev 2009Document11 pagesMA Series Rev 2009Muhammad Geluntung WafiNo ratings yet
- Banner, LX Series Part-Sensing Light ScreenDocument4 pagesBanner, LX Series Part-Sensing Light Screenalejandro garciaNo ratings yet
- Sonic1200M enDocument2 pagesSonic1200M enarsalan ahmadNo ratings yet
- 2008 Es3Document2 pages2008 Es3Jeffrey Cuyno MunarNo ratings yet
- Sonowall 70 NewDocument6 pagesSonowall 70 NewFlorea DaniNo ratings yet
- Stanley Fat Max 02 - GBDocument24 pagesStanley Fat Max 02 - GBjoedotbloggsNo ratings yet
- Na2-N e CataDocument11 pagesNa2-N e Catatan tanNo ratings yet
- Photoelectric Sensor: E3S-LSDocument8 pagesPhotoelectric Sensor: E3S-LSAnggi PrasetyoNo ratings yet
- SWR Meters Data SheetDocument2 pagesSWR Meters Data SheetSerbanescu AndreiNo ratings yet
- NV500 Tech BrochureDocument2 pagesNV500 Tech BrochurelzertcNo ratings yet
- 2250e CatalogDocument4 pages2250e Catalognazi1945No ratings yet
- Adxl103 203Document16 pagesAdxl103 203Eduardo Citti Truck CenterNo ratings yet
- CS850S DataDocument2 pagesCS850S DataAbab CscdNo ratings yet
- FDC2214 DatasheetDocument61 pagesFDC2214 Datasheetshantanu142No ratings yet
- MutliBeam EchosounderDocument2 pagesMutliBeam EchosounderAamir SirohiNo ratings yet
- Opa1692 Posibil Used in A Module of Prism Sound ADA 128Document43 pagesOpa1692 Posibil Used in A Module of Prism Sound ADA 128cosNo ratings yet
- Opa1692 Low-Power, Low-Noise and Low-Distortion Soundplus™ Audio Operational AmplifiersDocument42 pagesOpa1692 Low-Power, Low-Noise and Low-Distortion Soundplus™ Audio Operational Amplifierskishore_bulli6666No ratings yet
- Metrologicms 7120 OrbitDocument2 pagesMetrologicms 7120 OrbithamelucuNo ratings yet
- Line + Gradient Condenser Microphone: Polar PatternDocument1 pageLine + Gradient Condenser Microphone: Polar PatternKevin SuarezNo ratings yet
- The Revolution in Pigeon Sport - BENZING MLDocument2 pagesThe Revolution in Pigeon Sport - BENZING MLverschelderNo ratings yet
- 1-Port Indoor Omni Antenna Vertical PolarizationDocument1 page1-Port Indoor Omni Antenna Vertical PolarizationMARIONo ratings yet
- Services: Insightful Instrument Unique Relative Reading FeatureDocument2 pagesServices: Insightful Instrument Unique Relative Reading FeatureJuan EsNo ratings yet
- Wizard II SMRDocument13 pagesWizard II SMRjuan camilo EscuderoNo ratings yet
- MSLAB282 CatalogDocument7 pagesMSLAB282 CatalogJorge R. BarriosNo ratings yet
- Incredible Stability With Any Type of Target: High Power Digital Ultrasonic SensorsDocument12 pagesIncredible Stability With Any Type of Target: High Power Digital Ultrasonic SensorsSanti Diaz MonteroNo ratings yet
- Echotrac Mkiii: Model DFDocument2 pagesEchotrac Mkiii: Model DFjonathansolverNo ratings yet
- Bristol 428+series Multi-Wavelength Meter012017Document2 pagesBristol 428+series Multi-Wavelength Meter012017jballinasNo ratings yet
- Riser Bond Model 3300: Metallic Time Domain Reflectometer Cable Fault LocatorDocument2 pagesRiser Bond Model 3300: Metallic Time Domain Reflectometer Cable Fault LocatorEmmanuel Garcia CarrascoNo ratings yet
- Servlce: ManualDocument16 pagesServlce: ManualflagadelhaNo ratings yet
- Smart Sensor SS510Document2 pagesSmart Sensor SS510MarcinNo ratings yet
- ONE 085692340119 Jual Total Station Topcon Es 65 60 SeriesDocument2 pagesONE 085692340119 Jual Total Station Topcon Es 65 60 SeriesReselerNo ratings yet
- Lengh KeyenceDocument12 pagesLengh Keyencepoolhub mininigNo ratings yet
- 2008 Echotrac CVDocument2 pages2008 Echotrac CVJeline AmanteNo ratings yet
- Fis Bobcat OtdrDocument2 pagesFis Bobcat OtdrgonzalorobraNo ratings yet
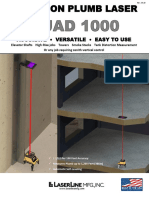
- Quad 1000 BrochureDocument2 pagesQuad 1000 Brochurebbutros_317684077No ratings yet
- Fotoceldas Laser LG10Document12 pagesFotoceldas Laser LG10Armando SotoNo ratings yet
- Tactical SystemDocument4 pagesTactical SystemPeterNo ratings yet
- (CATALOG) ULTRA 100HF - Veterinary - SmallDocument3 pages(CATALOG) ULTRA 100HF - Veterinary - SmallXavier MuñozNo ratings yet
- Nikon NE102, NE103 Theodolite Data SheetDocument2 pagesNikon NE102, NE103 Theodolite Data Sheetbbutros_317684077100% (1)
- E3&E3L Datasheet-V2.0-ENG - CompressedDocument4 pagesE3&E3L Datasheet-V2.0-ENG - CompressedFilipe AlmeidaNo ratings yet
- SP - 1219 - v1.0 - e - 945 - Product - Specification - EN 2Document2 pagesSP - 1219 - v1.0 - e - 945 - Product - Specification - EN 2Ninoslav KosticNo ratings yet
- LS 400 Series: Incremental Linear Encoders With Slimline Scale Housing - For Limited Installation SpaceDocument2 pagesLS 400 Series: Incremental Linear Encoders With Slimline Scale Housing - For Limited Installation SpaceНиколайNo ratings yet
- Cs FALCON EN V1 WebDocument2 pagesCs FALCON EN V1 WebmedinacoronajeancarlosNo ratings yet
- Pkt03 de Kenwood RadiosDocument2 pagesPkt03 de Kenwood RadiosLuis Alberto BelmonteNo ratings yet
- PSA45D Banda LDocument1 pagePSA45D Banda LHector CardosoNo ratings yet
- Z2R-400N OptexDocument10 pagesZ2R-400N OptexFernando EspinosaNo ratings yet
- Borg - Morse Systems Hy-Vo Chains Sheet PR 7-15Document2 pagesBorg - Morse Systems Hy-Vo Chains Sheet PR 7-15Андрей СидляровNo ratings yet
- SERVICE Alpine - Cda-9884rDocument64 pagesSERVICE Alpine - Cda-9884rАндрей СидляровNo ratings yet
- E34 93 PDFDocument556 pagesE34 93 PDFАндрей СидляровNo ratings yet
- Uk048e New Range LediDocument16 pagesUk048e New Range LediSayed HashemNo ratings yet
- User Manual: Installation Redundancy Switch RED25Document40 pagesUser Manual: Installation Redundancy Switch RED25Raj KumarNo ratings yet
- Datasheet Safir C GBDocument4 pagesDatasheet Safir C GBTuñoque Effio ArturoNo ratings yet
- Alarm & StatusDocument11 pagesAlarm & StatusEka Suranta Tarigan73% (11)
- Scope and Objective of The CourseDocument3 pagesScope and Objective of The CourseK.KARTHIKEYAN IYERNo ratings yet
- How Can I Set Up An ATV320 For Preset SpeedsDocument2 pagesHow Can I Set Up An ATV320 For Preset Speedselectrifier_surenNo ratings yet
- Dual Channel EMI Filter With ESD Protection CM1485Document6 pagesDual Channel EMI Filter With ESD Protection CM1485Banyu GeaNo ratings yet
- Ekor RPG - RPTDocument80 pagesEkor RPG - RPTAlexander BakirovNo ratings yet
- TCP IP Over Satellite - Yi ZhangDocument8 pagesTCP IP Over Satellite - Yi ZhangAhmadHambaliNo ratings yet
- Motorola W388: Getting Started GuideDocument58 pagesMotorola W388: Getting Started GuideyokonakagimaNo ratings yet
- P3U Order FormDocument3 pagesP3U Order FormLoo KlNo ratings yet
- 3.3 Parts ListDocument3 pages3.3 Parts ListmunhNo ratings yet
- Cisco Telepresence Solutions: Overview and Ordering GuideDocument20 pagesCisco Telepresence Solutions: Overview and Ordering Guideaccardi86No ratings yet
- Second Serial Interface of The S5-95U Programmable ControllerDocument109 pagesSecond Serial Interface of The S5-95U Programmable ControllerDugPigeonNo ratings yet
- FPGA Based Platform For Signal ProcessingDocument16 pagesFPGA Based Platform For Signal ProcessingKishoreNo ratings yet
- 3102319-En R004 EST Life Safety Systems UL 2572 Application GuideDocument36 pages3102319-En R004 EST Life Safety Systems UL 2572 Application GuideMoises ReyesNo ratings yet
- 000 Syllabus-Btech2010 (EE)Document52 pages000 Syllabus-Btech2010 (EE)Reeta DuttaNo ratings yet
- WWW - Oeclib.in: Seminar On 5G TechnologyDocument26 pagesWWW - Oeclib.in: Seminar On 5G TechnologyChiranjeet100% (1)
- Name of Project Smart Mailbox System: I-Problems FacedDocument3 pagesName of Project Smart Mailbox System: I-Problems FacedBrigth TsafNo ratings yet
- 18-Width and Resistance Calculation of PMOS and NMOS in CMOS Logic-03!02!2022 (03-Feb-2022) Material - I - 03!02!2022 - 12a. - Width - Calculation - ofDocument8 pages18-Width and Resistance Calculation of PMOS and NMOS in CMOS Logic-03!02!2022 (03-Feb-2022) Material - I - 03!02!2022 - 12a. - Width - Calculation - ofAniket RanjanNo ratings yet
- Installation & Operation Manual: Series 340 BN/MB Btu TransmitterDocument28 pagesInstallation & Operation Manual: Series 340 BN/MB Btu TransmitterPhilippe RibeiroNo ratings yet
- Physiotherm-S: Service ManualDocument29 pagesPhysiotherm-S: Service ManualLevent yanmaz100% (2)
- Thiet Ke He Thong NhungDocument75 pagesThiet Ke He Thong NhungPhạm Trung ĐứcNo ratings yet
- Datenblatt: PRO MAX3 120W 24V 5ADocument7 pagesDatenblatt: PRO MAX3 120W 24V 5ATrong Hung NguyenNo ratings yet
- CO Lab3Document14 pagesCO Lab3aki8aNo ratings yet
- Digital Principles and Application by Leach & MalvinoDocument700 pagesDigital Principles and Application by Leach & MalvinoSantosh Parvatikar94% (17)
- A Presentation ON: "Solar Charge Controller"Document19 pagesA Presentation ON: "Solar Charge Controller"Dipak Khadka100% (1)
- 3102354-EN R02 VS1 and VS4 Compatibility List (1) - MIRAFLORESDocument14 pages3102354-EN R02 VS1 and VS4 Compatibility List (1) - MIRAFLORESJhon Anderson Rodriguez NietoNo ratings yet
- How To Use This Parts CatalogDocument22 pagesHow To Use This Parts Catalogoleg-spbNo ratings yet
- Simulation of Parallel Resonance Condition in ElectricalDocument6 pagesSimulation of Parallel Resonance Condition in ElectricalyaoNo ratings yet