Download as pdf or txt
You might also like
- Multi-Traffic Scene Perception Based On Supervised LearningDocument26 pagesMulti-Traffic Scene Perception Based On Supervised LearningLakshmi Avadhanula78% (9)
- Matrices and Determinants: Advanced Level Pure MathematicsDocument36 pagesMatrices and Determinants: Advanced Level Pure MathematicsAmizan Abdullah100% (1)
- Helmet Detection System Using Mask R-CNNDocument8 pagesHelmet Detection System Using Mask R-CNNbryansantoso8585No ratings yet
- Research PaperDocument21 pagesResearch Paperdivyashree jadejaNo ratings yet
- UNetDocument18 pagesUNetdivyashree jadejaNo ratings yet
- Biogecko: Traffic Sign Recognition Using Deep LearningDocument7 pagesBiogecko: Traffic Sign Recognition Using Deep LearningAk AkNo ratings yet
- Transfer Learning Using Convolutional Neural Networks For Face Anti-SpoofingDocument8 pagesTransfer Learning Using Convolutional Neural Networks For Face Anti-SpoofingScientist RPNo ratings yet
- (IJETA-V10I1P1) :M.Thachayani, G.RubavaniDocument3 pages(IJETA-V10I1P1) :M.Thachayani, G.RubavaniIJETA - EighthSenseGroupNo ratings yet
- Kuch BhiDocument5 pagesKuch Bhiakshatmishra721No ratings yet
- Title - Traffic Sign Detection Using Convolutional Neural NetworkDocument15 pagesTitle - Traffic Sign Detection Using Convolutional Neural NetworkPranav TandonNo ratings yet
- Traffic Surveillance System For Vehicle Detection Using Discrete Wavelet TransformDocument13 pagesTraffic Surveillance System For Vehicle Detection Using Discrete Wavelet TransformFatima Azahrae NamossNo ratings yet
- Density Based Smart Traffic Control System Using CDocument8 pagesDensity Based Smart Traffic Control System Using CTimNo ratings yet
- Security Application of Computer VisionDocument6 pagesSecurity Application of Computer VisionKirana ShreeNo ratings yet
- Iee Paper IotDocument3 pagesIee Paper Iotpp ccNo ratings yet
- Qpkmt8k0wl4ucseasa2s9d1t4.Low Latency and Low-Level Sensor Fusion For Automotive Use-CasesDocument7 pagesQpkmt8k0wl4ucseasa2s9d1t4.Low Latency and Low-Level Sensor Fusion For Automotive Use-CasesHoracio KejnNo ratings yet
- I Jcs It 20120302103Document6 pagesI Jcs It 20120302103Chaitra MuralidharaNo ratings yet
- Traffic Sign Detection Using Yolo v5Document7 pagesTraffic Sign Detection Using Yolo v5IJRASETPublicationsNo ratings yet
- Mandellos 2011Document13 pagesMandellos 2011CARRILLO GABRIELNo ratings yet
- CURE-TSR: Challenging Unreal and Real Environments For Traffic Sign RecognitionDocument9 pagesCURE-TSR: Challenging Unreal and Real Environments For Traffic Sign RecognitionSowmitraDasNo ratings yet
- A Vision-Based Method For Improving The Safety of Self-DrivingDocument5 pagesA Vision-Based Method For Improving The Safety of Self-DrivingtilahunNo ratings yet
- A Deep Learning Based Stereo Matching Model For Autonomous VehicleDocument9 pagesA Deep Learning Based Stereo Matching Model For Autonomous VehicleIAES IJAINo ratings yet
- Self Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningDocument8 pagesSelf Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningKrishna KrishNo ratings yet
- 2nd ReviewDocument6 pages2nd ReviewMeron SolomonNo ratings yet
- Radio-Based Traffic Flow Detection and Vehicle Classification For Future Smart CitiesDocument5 pagesRadio-Based Traffic Flow Detection and Vehicle Classification For Future Smart CitiesAtestate LiceuNo ratings yet
- Robust Techniques For Background Subtraction in Urban Traffic VideoDocument12 pagesRobust Techniques For Background Subtraction in Urban Traffic VideoZohaib_Hanif_2870No ratings yet
- Enhancing Distracted Driver Detection With Human Body Activity Recognition Using Deep Learning F. Zandamela, F. Nicolls, D. Kunene & G. StoltzDocument17 pagesEnhancing Distracted Driver Detection With Human Body Activity Recognition Using Deep Learning F. Zandamela, F. Nicolls, D. Kunene & G. Stoltzjhonatan1.rmvNo ratings yet
- Pretrained Vehicle ClassifierDocument11 pagesPretrained Vehicle ClassifierSuvramalya BasakNo ratings yet
- JETIR2209375Document6 pagesJETIR2209375JoyalNo ratings yet
- Traffic Sign Board Recognition DeeplearningDocument3 pagesTraffic Sign Board Recognition DeeplearningushavalsaNo ratings yet
- Traffic Sign DetectionDocument5 pagesTraffic Sign DetectionSameer SinghNo ratings yet
- Remotesensing 13 00089 v2Document23 pagesRemotesensing 13 00089 v2Varun GoradiaNo ratings yet
- An Analysis of Various Deep Learning Algorithms For Image ProcessingDocument6 pagesAn Analysis of Various Deep Learning Algorithms For Image ProcessingVIVA-TECH IJRINo ratings yet
- Traffic Sign BaseDocument13 pagesTraffic Sign BaseMadhanDhonianNo ratings yet
- New Approach To Similarity Detection by Combining Technique Three-Patch Local Binary Patterns (TP-LBP) With Support Vector MachineDocument10 pagesNew Approach To Similarity Detection by Combining Technique Three-Patch Local Binary Patterns (TP-LBP) With Support Vector MachineIAES IJAINo ratings yet
- Autonomous CarDocument14 pagesAutonomous CarJaya KumarNo ratings yet
- Traffic Sign Recognition Using Machine Learning Models For Smart Driving Support SystemDocument21 pagesTraffic Sign Recognition Using Machine Learning Models For Smart Driving Support SystemRahul JajuNo ratings yet
- Brain Tumor Pattern Recognition Using Correlation FilterDocument5 pagesBrain Tumor Pattern Recognition Using Correlation FilteresatjournalsNo ratings yet
- Police Eyes - Real World Automated Detection of Traffic ViolationsDocument6 pagesPolice Eyes - Real World Automated Detection of Traffic ViolationsJim C. ValenciaNo ratings yet
- Journal FinalDocument6 pagesJournal FinalAkshaya SadhasivanNo ratings yet
- 1 s2.0 S0888327021009675 MainDocument21 pages1 s2.0 S0888327021009675 Mainvincenzo.gattulliNo ratings yet
- Vehicle Detection, Tracking and Counting For Traffic Surveillance Using Digital Image ProcessingDocument8 pagesVehicle Detection, Tracking and Counting For Traffic Surveillance Using Digital Image ProcessingIJRASETPublicationsNo ratings yet
- Chairat Low Cost High Performance Automatic Motorcycle Helmet Violation Detection WACV 2020 PaperDocument9 pagesChairat Low Cost High Performance Automatic Motorcycle Helmet Violation Detection WACV 2020 PaperAntla SarfarazNo ratings yet
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Document7 pagesIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNo ratings yet
- Real Time Image Processing Applied To Traffic Queue Detection AlgorithmDocument17 pagesReal Time Image Processing Applied To Traffic Queue Detection Algorithmshajin2233No ratings yet
- China Research ProposalDocument17 pagesChina Research Proposalmehwish mirzaNo ratings yet
- An Embedded Computer Vision SysytemDocument20 pagesAn Embedded Computer Vision SysytemeviteNo ratings yet
- Real Time Object Detection Using CNNDocument5 pagesReal Time Object Detection Using CNNyevanNo ratings yet
- Autonomous Intelligent Surveillance Networks: Richard ComleyDocument5 pagesAutonomous Intelligent Surveillance Networks: Richard ComleyetosidNo ratings yet
- Applicability and Performance of Standard Compression Methods For Efficient Data Transmission and Storage in Radar NetworksDocument19 pagesApplicability and Performance of Standard Compression Methods For Efficient Data Transmission and Storage in Radar NetworksNicholas FeatherstonNo ratings yet
- Chapter 6 CYTED BookDocument21 pagesChapter 6 CYTED BookJuan PampaNo ratings yet
- Toward Building A Robust and Intelligent Video Surveillance System: A Case StudyDocument4 pagesToward Building A Robust and Intelligent Video Surveillance System: A Case StudyUriel OuakeNo ratings yet
- Vehicle Detection and Tracking For Traffic ManagementDocument8 pagesVehicle Detection and Tracking For Traffic ManagementIAES IJAINo ratings yet
- Alert SystemDocument7 pagesAlert SystemBalasaheb Bhausaheb Jadhav -No ratings yet
- Autonomous VehiclesDocument15 pagesAutonomous VehiclesAYESHANo ratings yet
- Traffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirDocument21 pagesTraffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirRezaei MNo ratings yet
- 20bce2689 VL2022230103435 DaDocument30 pages20bce2689 VL2022230103435 DaRajvansh SinghNo ratings yet
- CR-YOLOv8 Multiscale Object Detection in Traffic Sign ImagesDocument10 pagesCR-YOLOv8 Multiscale Object Detection in Traffic Sign ImagesThe RoobanNo ratings yet
- Digital Image Processing Project ReportDocument11 pagesDigital Image Processing Project ReportPrachi GargNo ratings yet
- Avoiding Forward Car Collision Using Stereo Vision SystemDocument4 pagesAvoiding Forward Car Collision Using Stereo Vision SystemAsil AsilaNo ratings yet
- Virtual Traffic Light SynopsisDocument11 pagesVirtual Traffic Light SynopsisRITIKNo ratings yet
- Exploratory Data Analysis and Feature Selection For Social Media Hackers Prediction ProblemDocument19 pagesExploratory Data Analysis and Feature Selection For Social Media Hackers Prediction ProblemcseijNo ratings yet
- Sliding Mode Controller Design For Global Chaos Synchronization of Hyperchaotic Lorenz SystemsDocument10 pagesSliding Mode Controller Design For Global Chaos Synchronization of Hyperchaotic Lorenz SystemscseijNo ratings yet
- Free Publications : Scope & TopicsDocument2 pagesFree Publications : Scope & TopicscseijNo ratings yet
- Automatic Recognition System Using Preferential Image Segmentation For Leaf and Flower ImagesDocument13 pagesAutomatic Recognition System Using Preferential Image Segmentation For Leaf and Flower ImagescseijNo ratings yet
- Free Publications : Scope & TopicsDocument2 pagesFree Publications : Scope & TopicscseijNo ratings yet
- Free Publications : Scope & TopicsDocument2 pagesFree Publications : Scope & TopicscseijNo ratings yet
- A Cybersecurity and Digital Risk Assessment: A Family Case StudyDocument7 pagesA Cybersecurity and Digital Risk Assessment: A Family Case StudycseijNo ratings yet
- Free Publications : Scope & TopicsDocument2 pagesFree Publications : Scope & TopicscseijNo ratings yet
- A Cybersecurity and Digital Risk Assessment: A Family Case StudyDocument7 pagesA Cybersecurity and Digital Risk Assessment: A Family Case StudycseijNo ratings yet
- A Wireless Device To Modular Robotized Instrument For Health InformationDocument13 pagesA Wireless Device To Modular Robotized Instrument For Health InformationcseijNo ratings yet
- Sex Detection in The Early Stage of Fertilized Chicken Eggsvia Image RecognitionDocument8 pagesSex Detection in The Early Stage of Fertilized Chicken Eggsvia Image RecognitioncseijNo ratings yet
- Free Publications : Scope & TopicsDocument2 pagesFree Publications : Scope & TopicscseijNo ratings yet
- Fuzzy Assessment of The "5 E's" Instructional Treatment For Teaching Mathematics To Engineering StudentsDocument10 pagesFuzzy Assessment of The "5 E's" Instructional Treatment For Teaching Mathematics To Engineering StudentscseijNo ratings yet
- Free Publications : Scope & TopicsDocument2 pagesFree Publications : Scope & TopicscseijNo ratings yet
- User Guide: D-BOX Motion Players Control PanelDocument7 pagesUser Guide: D-BOX Motion Players Control PanelTony KututoNo ratings yet
- Exit Model 3rd Round Exam For H.DINODocument66 pagesExit Model 3rd Round Exam For H.DINOsuraasefa5No ratings yet
- Cisco Meeting Server MMP Command Reference 3 7Document81 pagesCisco Meeting Server MMP Command Reference 3 7karamokoNo ratings yet
- Question Bdgo4103 Introductory Organisational BehaviourDocument8 pagesQuestion Bdgo4103 Introductory Organisational Behaviourdicky chongNo ratings yet
- Blitz Report™ - World's Fastest Reporting and Data Upload For Oracle EBSDocument2 pagesBlitz Report™ - World's Fastest Reporting and Data Upload For Oracle EBSSagar BiswasNo ratings yet
- Microcomp Theory Tec-1Document25 pagesMicrocomp Theory Tec-1Alfredo Meurer JuniorNo ratings yet
- Suong Sovann CV Jan 2019 - 19aug2019Document7 pagesSuong Sovann CV Jan 2019 - 19aug2019Redwanul IslamNo ratings yet
- Smartsense - Broschüre 2019Document2 pagesSmartsense - Broschüre 2019JOSE HUAMANINo ratings yet
- RL All SlidesDocument616 pagesRL All SlidesNEELIM SAHARIAHNo ratings yet
- Atm SoftwareDocument93 pagesAtm SoftwareHemant Kumar50% (2)
- WL-11 WS/WSD: User GuideDocument8 pagesWL-11 WS/WSD: User GuideJasonNo ratings yet
- A400 Startup Manual Part2 v7.1Document40 pagesA400 Startup Manual Part2 v7.1mkgdy6nj4kNo ratings yet
- Assignment 3 2021Document3 pagesAssignment 3 2021Prajot PatneNo ratings yet
- All-In-One Internet-Ready RTU For Automation and Monitoring ApplicationsDocument1 pageAll-In-One Internet-Ready RTU For Automation and Monitoring ApplicationsPankaj RawatNo ratings yet
- Arpit PAMLUPDocument11 pagesArpit PAMLUPsagar kaluraNo ratings yet
- Actionable Alarming: Make Alarms & Situational Awareness Your Closest Allies To Maximize Productivity & Minimize DowntimeDocument16 pagesActionable Alarming: Make Alarms & Situational Awareness Your Closest Allies To Maximize Productivity & Minimize DowntimeManzoor AnsariNo ratings yet
- Phantasy Star Portable 2 Infinity English Patch Installation Guide v2Document13 pagesPhantasy Star Portable 2 Infinity English Patch Installation Guide v2Conta PadraoNo ratings yet
- Oracle FLEXCUBE Direct Banking Parameter SheetDocument200 pagesOracle FLEXCUBE Direct Banking Parameter SheetMalikNo ratings yet
- 55269A - Intermediate Microsoft Excel 2019 - Skillpipe2Document18 pages55269A - Intermediate Microsoft Excel 2019 - Skillpipe2liana bakkeriNo ratings yet
- Transient Compressible Flow Inside Convergent Divergent NozzleDocument45 pagesTransient Compressible Flow Inside Convergent Divergent NozzlelitonNo ratings yet
- Conversational Ordering MDDocument64 pagesConversational Ordering MDGustavo Javier Castañón SelemNo ratings yet
- An Overview of Cloud Computing at Yahoo!: Raghu RamakrishnanDocument68 pagesAn Overview of Cloud Computing at Yahoo!: Raghu RamakrishnanRaj MaanaNo ratings yet
- C++ BibleDocument77 pagesC++ Biblemr.murphreyNo ratings yet
- Respuestas Incredible English Test 4 PrimariaDocument3 pagesRespuestas Incredible English Test 4 PrimariaElvira Horneros Donoso0% (2)
- HP Laptops I5 PDFDocument4 pagesHP Laptops I5 PDFKals ShanmugamNo ratings yet
- BP Review Feedback Form (Responses)Document5 pagesBP Review Feedback Form (Responses)Jacklyn LadeslaNo ratings yet
- Account Statement From 1 Sep 2023 To 11 Mar 2024: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalanceDocument6 pagesAccount Statement From 1 Sep 2023 To 11 Mar 2024: TXN Date Value Date Description Ref No./Cheque No. Debit Credit BalancesriiramdigitalNo ratings yet
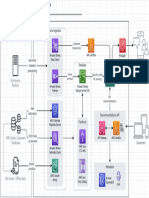
- Diagrama ArquitecturaDocument1 pageDiagrama ArquitecturaMiguel RomeroNo ratings yet
- Manual - Layer-3 MPLS VPN Example - MikroTik WikiDocument5 pagesManual - Layer-3 MPLS VPN Example - MikroTik WikiCarlos Henrique TrentiniNo ratings yet