Download as pdf or txt
You might also like
- Mitsubishi Full PUHY P700YSGM ADocument108 pagesMitsubishi Full PUHY P700YSGM AmpelperNo ratings yet
- Square Wave GeneratorDocument6 pagesSquare Wave GeneratorRahul KunduNo ratings yet
- Step Recovery Diode Frequency MultiplierDocument4 pagesStep Recovery Diode Frequency MultiplierfahkingmoronNo ratings yet
- Topic 1 Electric Charges and ForcesDocument15 pagesTopic 1 Electric Charges and ForcesSmk Abdul Rahim DuaNo ratings yet
- Pulse and Digital Circuits JBIETDocument128 pagesPulse and Digital Circuits JBIETRam kumarNo ratings yet
- PDC Notes RajeshDocument135 pagesPDC Notes RajeshRama KrishnaNo ratings yet
- Unit - I Linear WaveshapingDocument30 pagesUnit - I Linear WaveshapingfaizankahanNo ratings yet
- Notes 0Document158 pagesNotes 0Sunil ChoudharyNo ratings yet
- Lecture Notes 1 PDCDocument172 pagesLecture Notes 1 PDCJanuNo ratings yet
- Lws NotesDocument25 pagesLws Noteskping4066No ratings yet
- 3 Ece - PDC Unit - I PDFDocument64 pages3 Ece - PDC Unit - I PDFSree VamsiNo ratings yet
- ECE319 (CS) Unit 1 Part 1Document57 pagesECE319 (CS) Unit 1 Part 1Rahul LoharNo ratings yet
- Unit-I Linear WaveshapingDocument42 pagesUnit-I Linear Waveshapingsurya tejaNo ratings yet
- Unit-I Linear WaveshapingDocument46 pagesUnit-I Linear Waveshapingramaiah2369No ratings yet
- Unit-I Linear WaveshapingDocument42 pagesUnit-I Linear WaveshapingsuryaNo ratings yet
- Clippers and ClampersDocument74 pagesClippers and ClampersRiyaz Khan Pathan50% (4)
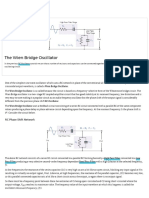
- Wein Bridge OscillatorDocument11 pagesWein Bridge OscillatorDimas RioNo ratings yet
- Delay: Minimum Time From The Input Crossing 50% To The OutputDocument12 pagesDelay: Minimum Time From The Input Crossing 50% To The Outputakash bhumiNo ratings yet
- Electronics and Communication Engineering: Department ofDocument39 pagesElectronics and Communication Engineering: Department ofMohit MeenaNo ratings yet
- Ring OscillatorDocument12 pagesRing OscillatorCmeLiv InmyHart NpaynoRentNo ratings yet
- EE680Lab Experiment6-7Document21 pagesEE680Lab Experiment6-7Amro AbusailNo ratings yet
- Ec FinalDocument46 pagesEc FinalManjunath YadavNo ratings yet
- Full Report Frequency Response and Switching of Bipolar TransistorsDocument8 pagesFull Report Frequency Response and Switching of Bipolar Transistorsarol_khaiNo ratings yet
- Calculation of RC FiltersDocument10 pagesCalculation of RC FiltersAnonymous DjWqKpZ1No ratings yet
- Ringing On A Transmission LineDocument33 pagesRinging On A Transmission LinePrem BhaskaraNo ratings yet
- A Monostable MultivibratorDocument7 pagesA Monostable Multivibratorammayi9845_930467904No ratings yet
- Miller Sweep CircuitDocument9 pagesMiller Sweep CircuitAiza GhanchiNo ratings yet
- Introduction To Digital Modulation & Demodulation TechniquesDocument116 pagesIntroduction To Digital Modulation & Demodulation TechniqueswooDefyNo ratings yet
- Wien Bridge Oscillator Tutorial and TheoryDocument9 pagesWien Bridge Oscillator Tutorial and TheoryemilfrancuNo ratings yet
- 06 KZ - KL3091 Amplifier Design Class D 2009-09-09Document10 pages06 KZ - KL3091 Amplifier Design Class D 2009-09-09Rekabentuk DirgantaraNo ratings yet
- Integrated Circuits:) of Flip-Flop ThroughDocument13 pagesIntegrated Circuits:) of Flip-Flop ThroughShubh MishraNo ratings yet
- ,,,,CNT Lab ReportDocument13 pages,,,,CNT Lab ReportHosea MuchiriNo ratings yet
- A Reactance ModulatorDocument17 pagesA Reactance ModulatorAldrin Sagum100% (1)
- The RC Phase Shift OscillatorDocument12 pagesThe RC Phase Shift OscillatorvikashrahiNo ratings yet
- 3.4.2 Output Capacitor: Out C, Max OutDocument14 pages3.4.2 Output Capacitor: Out C, Max OutReza RzNo ratings yet
- Ac Fundamnetals ManualDocument12 pagesAc Fundamnetals ManualRaj Mehra MeharNo ratings yet
- The RC Oscillator CircuitDocument6 pagesThe RC Oscillator CircuitNishanthi BheemanNo ratings yet
- AC AnalysisDocument12 pagesAC AnalysisIan Benedict LavapieNo ratings yet
- EC303Document19 pagesEC303api-3853441No ratings yet
- 3-Lesson Notes Lecture 1Document11 pages3-Lesson Notes Lecture 1José Diogo ForteNo ratings yet
- Unit 5 NotesDocument51 pagesUnit 5 NotesJohnsi JNo ratings yet
- Solution - Assignment 3 - Diode CircuitsDocument12 pagesSolution - Assignment 3 - Diode Circuitsshirsodey21No ratings yet
- Wave Shaping CircuitsDocument15 pagesWave Shaping CircuitsParesh SawantNo ratings yet
- Function Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorDocument7 pagesFunction Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorMuhammad JunaidNo ratings yet
- Small-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMDocument8 pagesSmall-Signal Analysis of Open-Loop PWM Flyback DCDC Converter For CCMAslı ÇakırNo ratings yet
- Astable MultivibratorDocument146 pagesAstable Multivibratorsantovaron123No ratings yet
- Experiment 1: Mohammad Sahil 2020UCM2320Document7 pagesExperiment 1: Mohammad Sahil 2020UCM2320Sahil KhanNo ratings yet
- Signal Generator Project StatementDocument16 pagesSignal Generator Project StatementHussain Bin AliNo ratings yet
- The Wien Bridge OscillatorDocument8 pagesThe Wien Bridge OscillatorSamuel ArthurNo ratings yet
- Lab Session: 3: Demonstrate The Behavior of A Silicon Diode in Half Wave RectifierDocument7 pagesLab Session: 3: Demonstrate The Behavior of A Silicon Diode in Half Wave RectifierFatima AmjadNo ratings yet
- Class C Amplifier1Document8 pagesClass C Amplifier1qaisar ayubNo ratings yet
- Revisit: Resistance and Capacitance MOSFET Model For Digital CircuitsDocument33 pagesRevisit: Resistance and Capacitance MOSFET Model For Digital Circuitsdilshan singhNo ratings yet
- Class C Amplifiers IntroDocument8 pagesClass C Amplifiers IntroTebogo SekgwamaNo ratings yet
- Integrating ADCDocument10 pagesIntegrating ADCchintu333No ratings yet
- CMOS Function GeneratorDocument3 pagesCMOS Function Generatordborcic61No ratings yet
- Stability CMOS Ring OscillatorDocument4 pagesStability CMOS Ring OscillatorkaaashuNo ratings yet
- 2 in One LabDocument5 pages2 in One LabEnock KachokolaNo ratings yet
- Triangular Wave GeneratorDocument7 pagesTriangular Wave Generatorsourav_cybermusicNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- ECE319 (CS) Unit 1 Part 1Document57 pagesECE319 (CS) Unit 1 Part 1Rahul LoharNo ratings yet
- Atul (Python)Document11 pagesAtul (Python)Rahul LoharNo ratings yet
- ECE319 (CS), Unit 2Document85 pagesECE319 (CS), Unit 2Rahul LoharNo ratings yet
- DAADocument6 pagesDAARahul LoharNo ratings yet
- Edr 3 Prob 4Document7 pagesEdr 3 Prob 4Arfel Marie FuentesNo ratings yet
- Angular Momentum Homework SolutionDocument4 pagesAngular Momentum Homework Solutionkctwfxfng100% (1)
- NTN Ultage SRB 3030 eDocument16 pagesNTN Ultage SRB 3030 eDhanielNo ratings yet
- Doubly Fed Induction GeneratorDocument8 pagesDoubly Fed Induction GeneratorMashood NasirNo ratings yet
- Manual RK 45Document8 pagesManual RK 45Batcas EloyNo ratings yet
- Heat Transfer ProblemsDocument9 pagesHeat Transfer ProblemsAdriane Gabrielle BautistaNo ratings yet
- Buck Converter Efficiency App-EDocument16 pagesBuck Converter Efficiency App-EmehdiNo ratings yet
- Classifications of Chopper (Suha Dalaf)Document28 pagesClassifications of Chopper (Suha Dalaf)noor deenNo ratings yet
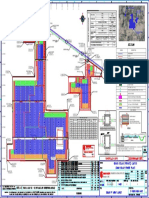
- Proposed Solar PV Plant Labour Colony Area: Engineers & Consultants (FZC.,) Sharjah, UAEDocument1 pageProposed Solar PV Plant Labour Colony Area: Engineers & Consultants (FZC.,) Sharjah, UAEMuhammad NasarNo ratings yet
- Pressure in Flowing FluidsDocument10 pagesPressure in Flowing FluidsIan SorzNo ratings yet
- A Multifunctional Integrated Onboard Battery Charger For Plug-In Electric Vehicles PEVsDocument6 pagesA Multifunctional Integrated Onboard Battery Charger For Plug-In Electric Vehicles PEVsDEBARATI DAMNo ratings yet
- Process Datasheet FOR Vgo HDT Feed Storage Tank (203-Tk-012)Document6 pagesProcess Datasheet FOR Vgo HDT Feed Storage Tank (203-Tk-012)pavanNo ratings yet
- Three Phase Fault Detection System in Transmission SystemDocument5 pagesThree Phase Fault Detection System in Transmission SystemGustavoNo ratings yet
- ZIBO ZHENGDA Amine-Terminated PolyetherDocument12 pagesZIBO ZHENGDA Amine-Terminated PolyetherA MahmoodNo ratings yet
- Design and Implementation of An Independent Renewable Energy Source (5kva Solar Powered Inverter)Document17 pagesDesign and Implementation of An Independent Renewable Energy Source (5kva Solar Powered Inverter)BayeNo ratings yet
- Adtech 2 Course OutlineDocument1 pageAdtech 2 Course OutlineEarn8348No ratings yet
- Line Protection BasicDocument54 pagesLine Protection BasicAshishKumarNo ratings yet
- Catlog 2Document3 pagesCatlog 2siddhant.temburkarNo ratings yet
- Testing Procedures For Preventive Maintenance of Electrical EquipmentDocument100 pagesTesting Procedures For Preventive Maintenance of Electrical EquipmentReynante T. BitasNo ratings yet
- Chapter 2: Diode and ApplicationDocument11 pagesChapter 2: Diode and Applicationসায়েম মুহাম্মাদNo ratings yet
- Turboelectric Propulsion in Commercial AvaitionDocument18 pagesTurboelectric Propulsion in Commercial AvaitionjuanNo ratings yet
- Types of Relays: Protection-Relays-Or-Protective-RelaysDocument2 pagesTypes of Relays: Protection-Relays-Or-Protective-Relayspoonam yadavNo ratings yet
- Lab Journal For EC258 Electromagnetic Waves Lab.: Piyush Kumar BTECH/60120/19 ECEDocument66 pagesLab Journal For EC258 Electromagnetic Waves Lab.: Piyush Kumar BTECH/60120/19 ECEAryan KumarNo ratings yet
- Solar Photovoltaic System PT-SPS-N10 2Document1 pageSolar Photovoltaic System PT-SPS-N10 2efendi susantoNo ratings yet
- Problem Set 11Document10 pagesProblem Set 11mmccomas08No ratings yet
- Emtl Question Bank Imp QsDocument9 pagesEmtl Question Bank Imp QsSri MurthyNo ratings yet
- PAPER Final FractionationDocument7 pagesPAPER Final FractionationkaruniaNo ratings yet
- !!!destiny MatrixDocument107 pages!!!destiny Matrixjuancorraliza0% (2)